
一种机械夹紧装置.pdf

秋花****姐姐


1/10
2/10
3/10

4/10
5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种机械夹紧装置.pdf
本发明公开了一种机械夹紧装置,包括底座,所述底座上设置有安装装置,安装装置呈半圆柱体结构,且安装装置的弧面设置在底座内部,安装装置上设置有夹具,夹具固定在安装装置中半圆柱体的剖面上,安装装置设置在底座和夹具之间;安装装置中设置有扇形齿轮,且扇形齿轮的齿面设置在弧面上,底座中设置有转轴,转轴的外壁上套合有齿轮,齿轮设置在底座内部,且齿轮与伞形齿轮啮合。该夹紧装置的结构简单,在工件夹紧后,利用转动转轴能够调整工件相对水平面的角度,满足加工要求,而且锁紧效果好,解决了现有夹紧装置无法改变工件的角度导致加工受限的
一种机械夹紧装置.pdf
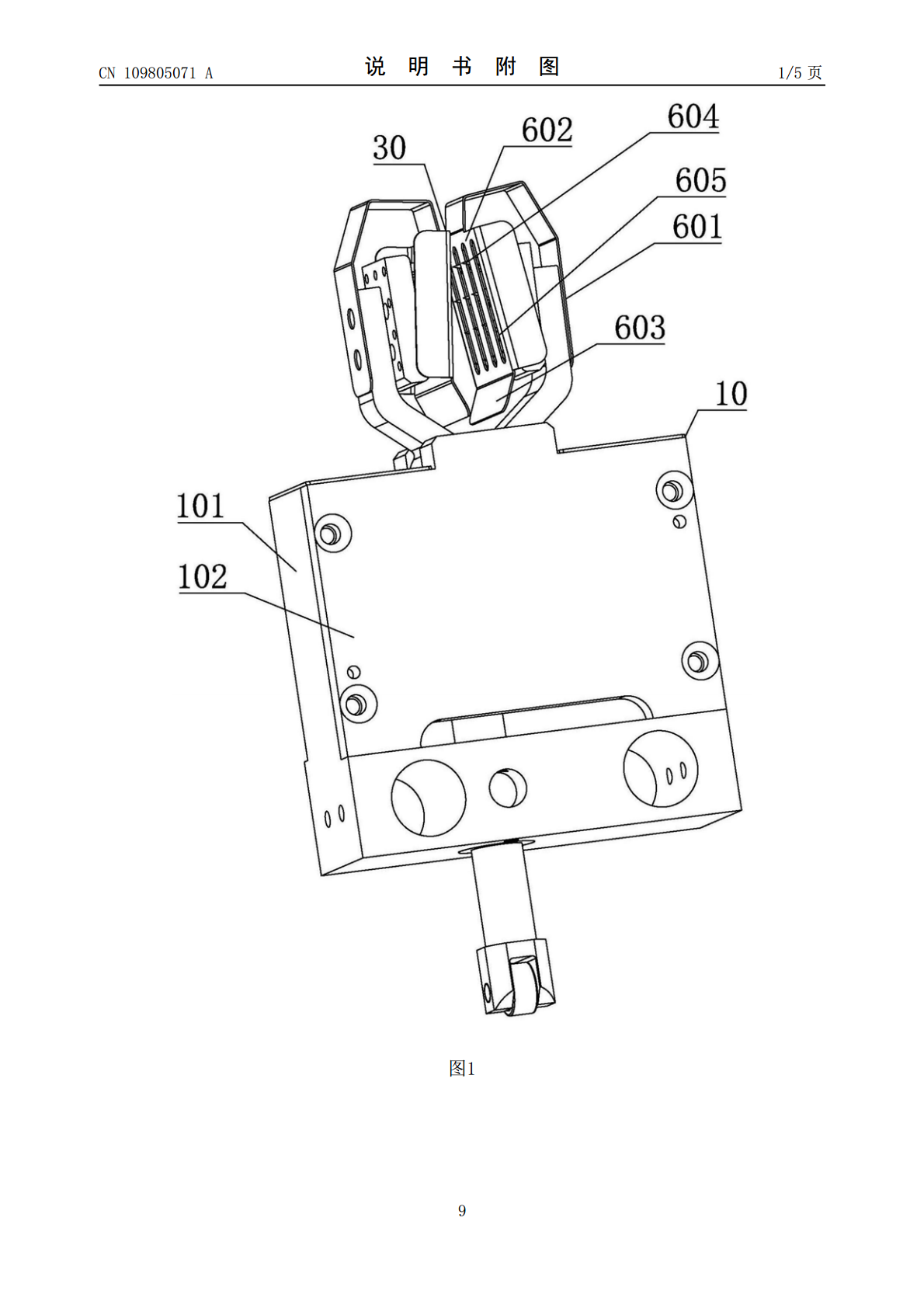
本发明公开了一种机械夹紧装置,包括夹具外壳、滑块、夹紧元件和顶推杆,夹具外壳的内壁竖直设置有导向面;滑块上设置有两个导向滑槽;夹紧元件包括左右对称设置的两个摆动单元,每个摆动单元均包括、摆动铰轴和滑动销轴,摆动臂通过摆动铰轴铰接在夹具外壳上,摆动臂固定安装滑动销轴上;顶推杆竖直设置并且其上端伸入夹具外壳后与滑块连接。本发明采用在可上下直线运动的滑块上设置对称的导向滑槽,滑块往复直线运动过程中带动两个摆动臂实现夹紧和松开动作,从而实现了直线运动向夹紧和松开动作的转化,而且结构简单可靠,解决了传统方式通过齿轮
一种智能刺绣机械用夹紧装置.pdf
本发明公开了一种智能刺绣机械用夹紧装置,包括固定框架,所述固定框架的内部转动连接有两个转轴,转轴上固定有缠绕辊,缠绕辊的一侧侧壁上开有夹持槽,夹持槽的底端侧壁上转动连接有两个螺纹杆,螺纹杆位于夹持槽的两侧,螺纹杆上螺纹连接有水平设置的活动块,活动块滑动连接在夹持槽内,活动块的底端安装有夹持块,一个螺纹杆的顶端连接有转动手柄,所述固定框架的一侧设有安装架,转轴的一端延伸至安装架的内部连接有第一锥形齿轮,安装架的一侧侧壁上通过螺钉安装有第一气缸。本发明能够对不同长度的布料进行固定夹紧,同时由于其长度短,产生的

一种用于机械加工的夹紧装置.pdf
本发明公开了一种用于机械加工的夹紧装置,包括底板,所述底板的上表面开设有滑槽,并且滑槽内设置有滑块,所述滑块的上表面与第一支撑板的下表面固定连接,并且第一支撑板的上表面与固定块的下表面固定连接,所述固定块的右侧面与第一压板的左侧面固定连接,并且固定块的左侧面与齿杆的右端固定连接,并且齿杆与齿轮啮合,齿轮的背面与第一传动装置的正面固定连接。该用于机械加工的夹紧装置,通过设置齿杆、齿轮、第一传动装置、第二传动装置、固定块、第一压板、第二压板、螺纹柱、螺纹筒、主动轮和从动轮,从而不需要更换夹具即可对工件进行夹持

一种用于机械加工的定位夹紧装置.pdf
本发明公开了一种用于机械加工的定位夹紧装置,包括导轨座、端盖、螺杆、连接头、锁紧座、螺母座、活动夹持座、固定夹持座、通槽、定位组件一、锁紧螺钉一、齿条体一、拉簧一、齿条体二、连接齿轮、固定盖二、连接块二、锁紧螺钉二、定位组件二和拉簧二等;发明具有结构合理简单,这里设置的连接齿轮,能够确保齿条体一和齿条体二能够同时向外侧或内侧移动,从而能够将工件中心定位在活动夹持座和固定夹持座之间的中心位置,也就保证了工件中心始终位于固定的位置进行加工提高了加工的质量;本发明中通过扳手带动连接头旋转,而连接头的旋转则使螺杆