
齿面残余应力测量方法.pdf

是湛****21

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
齿面残余应力测量方法.pdf
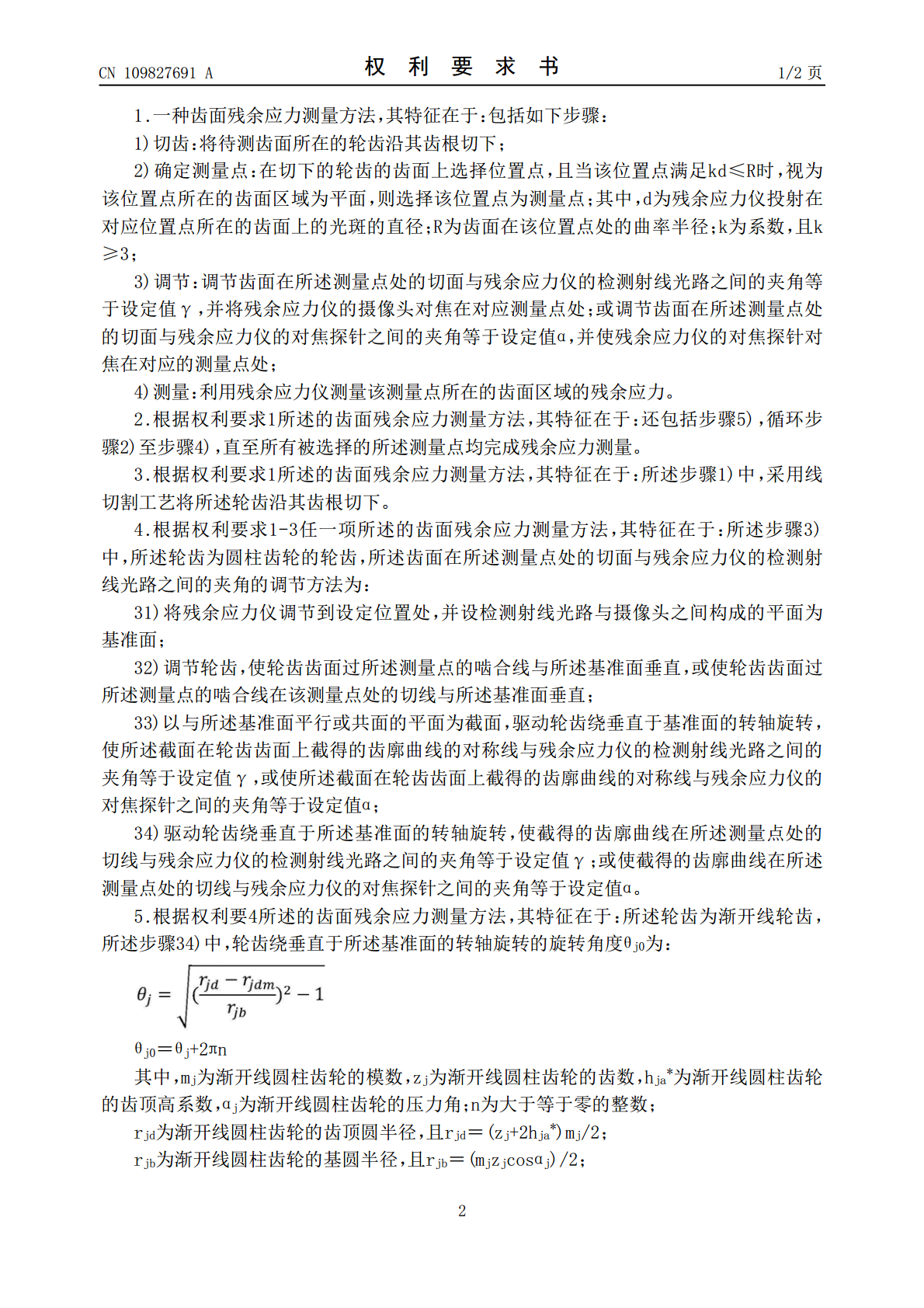
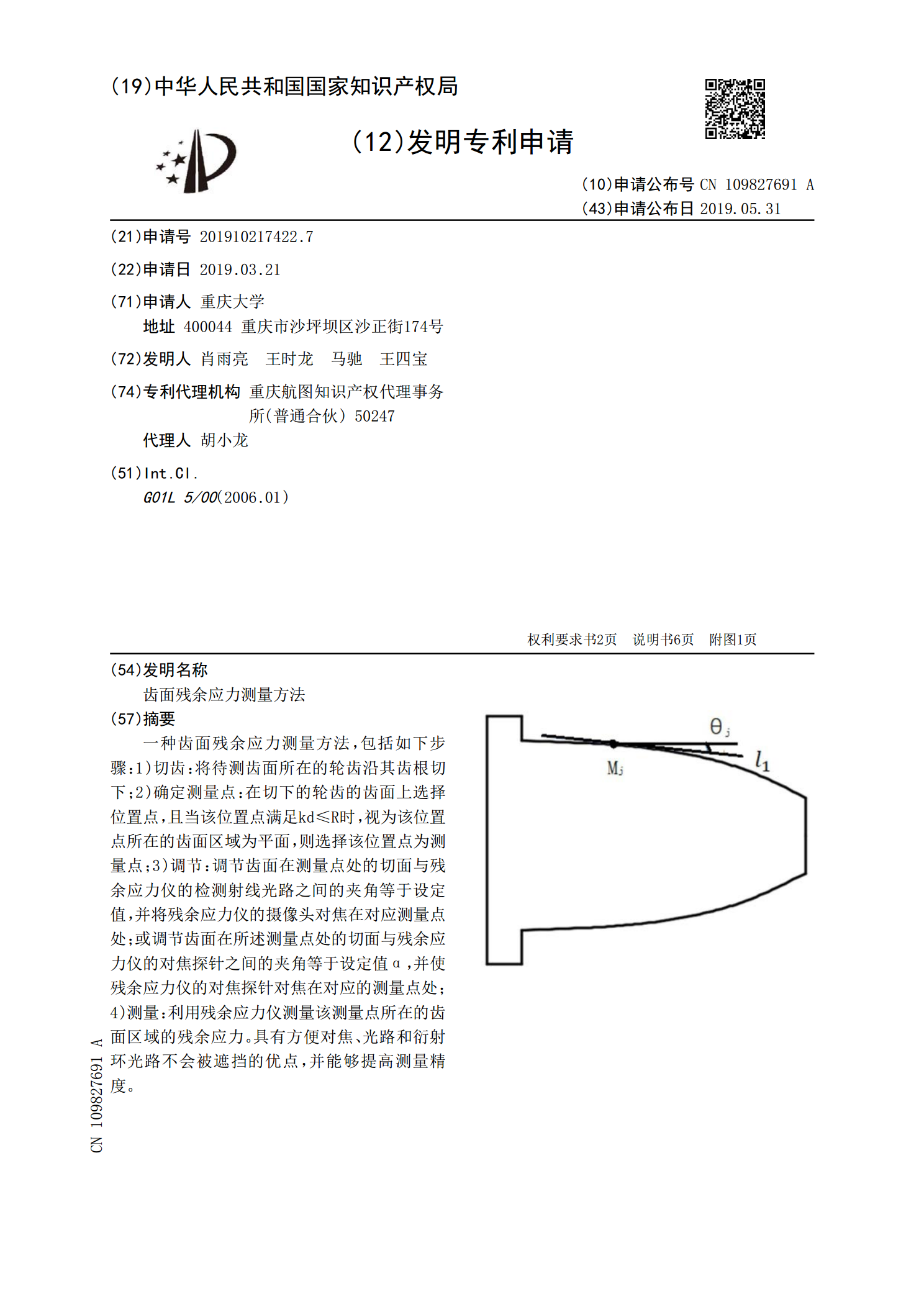
一种齿面残余应力测量方法,包括如下步骤:1)切齿:将待测齿面所在的轮齿沿其齿根切下;2)确定测量点:在切下的轮齿的齿面上选择位置点,且当该位置点满足kd≤R时,视为该位置点所在的齿面区域为平面,则选择该位置点为测量点;3)调节:调节齿面在测量点处的切面与残余应力仪的检测射线光路之间的夹角等于设定值,并将残余应力仪的摄像头对焦在对应测量点处;或调节齿面在所述测量点处的切面与残余应力仪的对焦探针之间的夹角等于设定值α,并使残余应力仪的对焦探针对焦在对应的测量点处;4)测量:利用残余应力仪测量该测量点所在的齿面
轮齿装夹装置及齿面残余应力测量方法.pdf
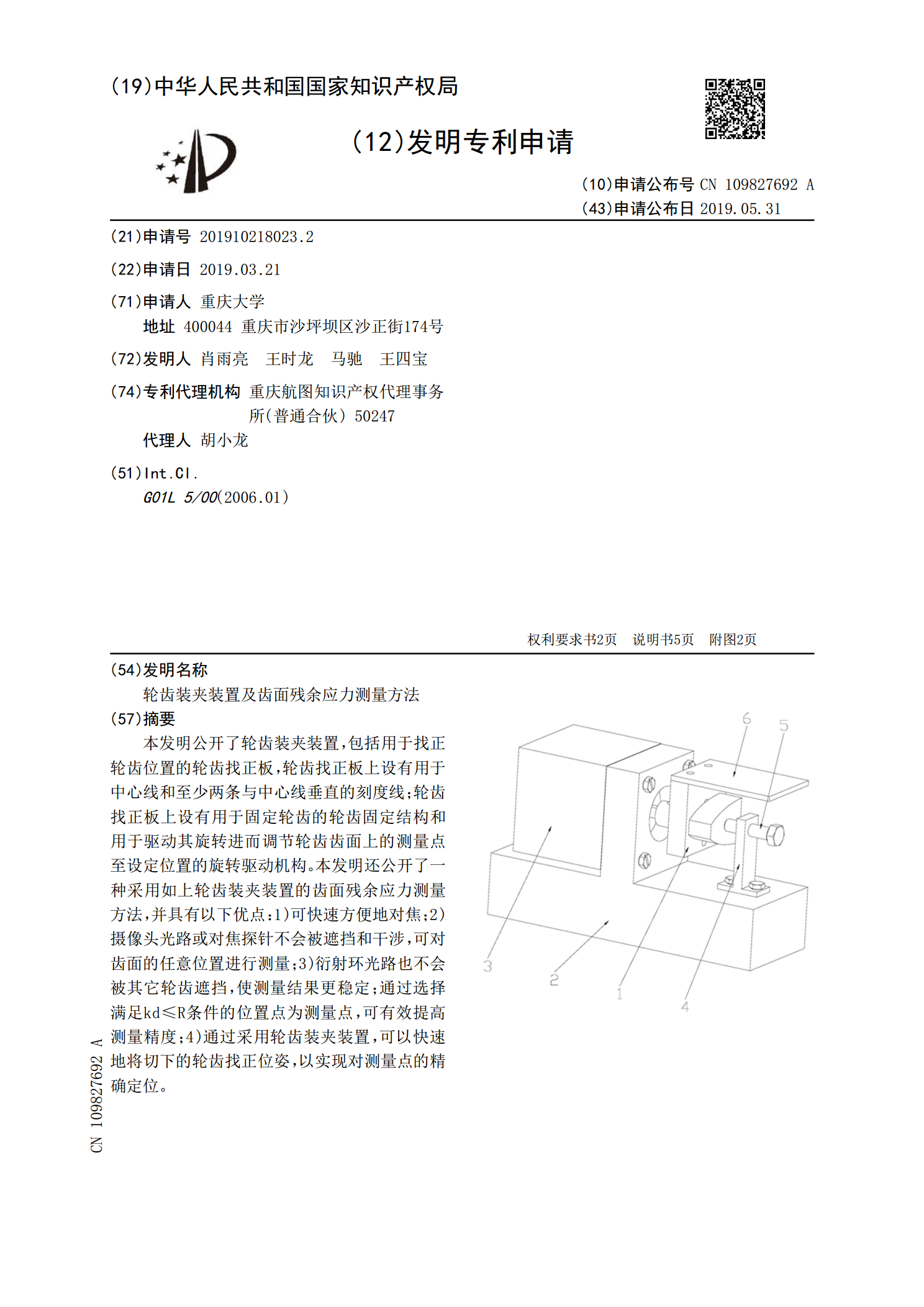
本发明公开了轮齿装夹装置,包括用于找正轮齿位置的轮齿找正板,轮齿找正板上设有用于中心线和至少两条与中心线垂直的刻度线;轮齿找正板上设有用于固定轮齿的轮齿固定结构和用于驱动其旋转进而调节轮齿齿面上的测量点至设定位置的旋转驱动机构。本发明还公开了一种采用如上轮齿装夹装置的齿面残余应力测量方法,并具有以下优点:1)可快速方便地对焦;2)摄像头光路或对焦探针不会被遮挡和干涉,可对齿面的任意位置进行测量;3)衍射环光路也不会被其它轮齿遮挡,使测量结果更稳定;通过选择满足kd≤R条件的位置点为测量点,可有效提高测量精

齿面残余应力对齿轮轮齿弯曲疲劳寿命的影响分析.docx
齿面残余应力对齿轮轮齿弯曲疲劳寿命的影响分析齿面残余应力在齿轮设计中起着重要的作用。它是齿轮额定寿命的重要参考依据,影响着齿轮的性能和寿命。齿面残余应力是由于齿轮加工或使用过程中造成的应力,由于内应力较大,其效果往往比外力更为显著。本文就齿面残余应力对齿轮轮齿弯曲疲劳寿命的影响进行分析。一、齿面残余应力的类型和来源1.类型:齿面残余应力主要包括残余压应力和残余拉应力。残余压应力有助于提高齿轮的疲劳寿命,而残余拉应力则会降低齿轮的疲劳寿命。2.来源:齿面残余应力的产生主要有以下几个方面:(1)加工过程中的残
残余应力测量方法和残余应力测量装置.pdf
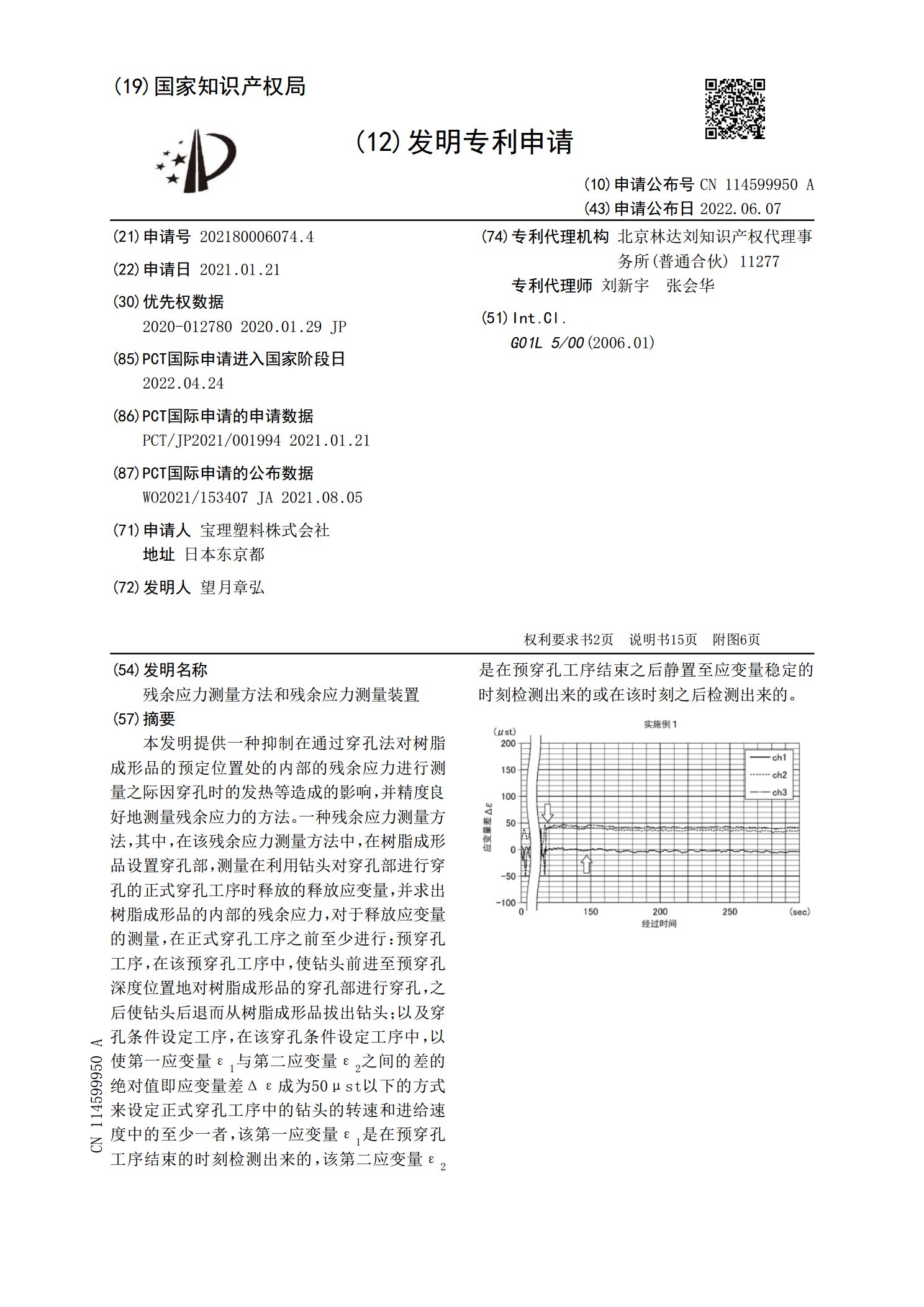
本发明提供一种抑制在通过穿孔法对树脂成形品的预定位置处的内部的残余应力进行测量之际因穿孔时的发热等造成的影响,并精度良好地测量残余应力的方法。一种残余应力测量方法,其中,在该残余应力测量方法中,在树脂成形品设置穿孔部,测量在利用钻头对穿孔部进行穿孔的正式穿孔工序时释放的释放应变量,并求出树脂成形品的内部的残余应力,对于释放应变量的测量,在正式穿孔工序之前至少进行:预穿孔工序,在该预穿孔工序中,使钻头前进至预穿孔深度位置地对树脂成形品的穿孔部进行穿孔,之后使钻头后退而从树脂成形品拔出钻头;以及穿孔条件设定工

残余应力的超声测量方法.docx
残余应力的超声测量方法残余应力的超声测量方法摘要:残余应力是指物体在去除外力作用后保留的应力状态,其在工程实践中具有重要的意义。超声测量方法是一种常用的残余应力监测技术,它具有高精度、非破坏性和实时监测等优点。本文通过对残余应力的超声测量方法进行综述,包括激光超声技术、时间差超声技术和多参量超声技术,分析它们的工作原理、应用范围和测量精度,并对未来的发展进行展望。关键词:残余应力;超声测量方法;激光超声技术;时间差超声技术;多参量超声技术引言:残余应力是材料工程中一个重要的参数,它直接影响到材料的机械性能