
多臂机传动凸轮的选综控制机构.pdf

Jo****34


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
多臂机传动凸轮的选综控制机构.pdf
本发明涉及一种多臂机传动凸轮的选综控制机构。本发明提综臂随偏心盘运动,盘形连杆活套在偏心盘上,偏心盘通过控制钩与驱动盘相作用,提综臂随不随偏心盘一起运动,则由选综控制机构控制。本发明提出并设计了一种匀速旋转输入运动转变为同轴旋转变速输出的新机构,该机构的结构紧凑,输出稳定,具有良好的运动学性能,特别适合在高速旋转式多臂机中应用。
多臂机凸轮传动装置.pdf
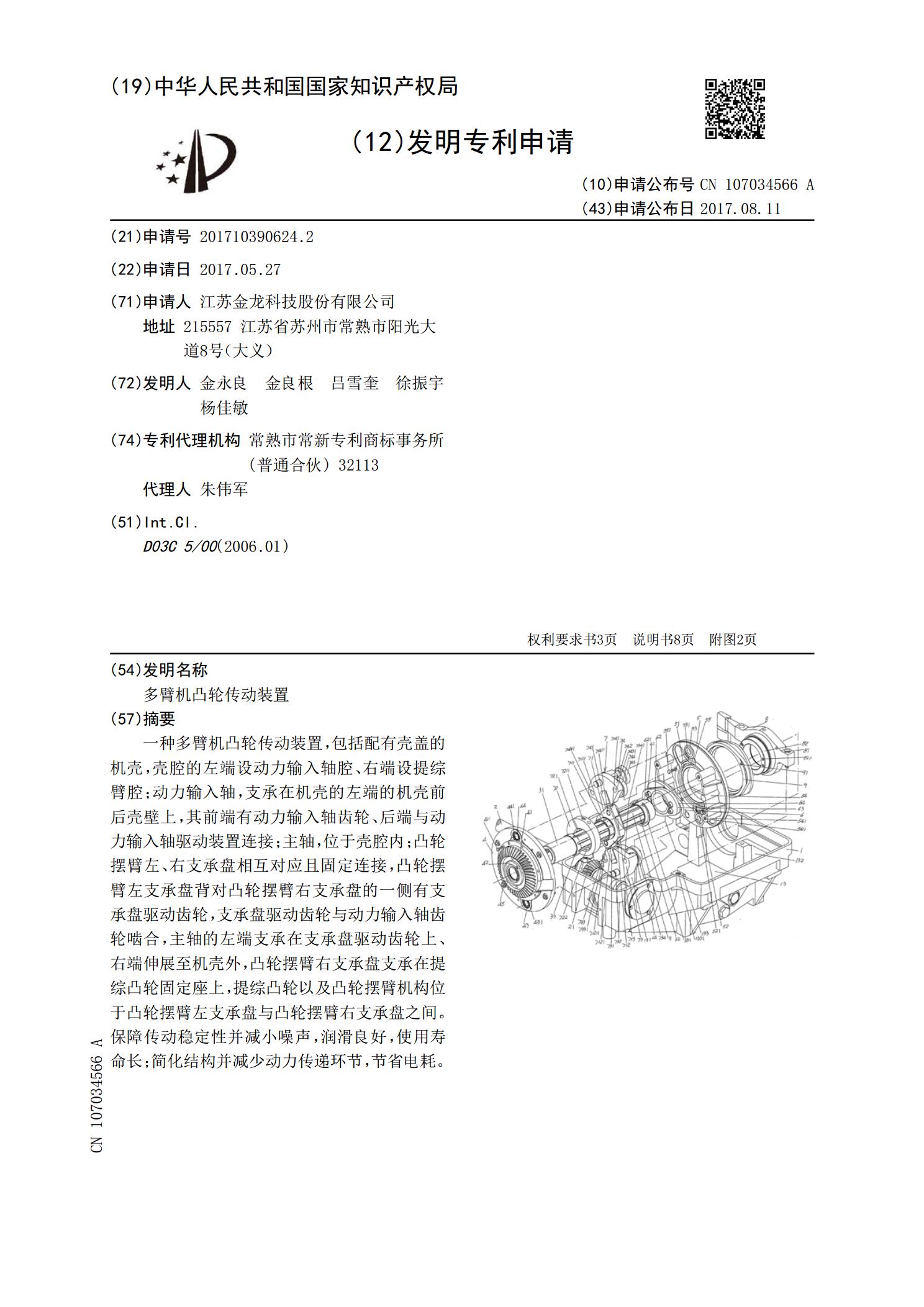
一种多臂机凸轮传动装置,包括配有壳盖的机壳,壳腔的左端设动力输入轴腔、右端设提综臂腔;动力输入轴,支承在机壳的左端的机壳前后壳壁上,其前端有动力输入轴齿轮、后端与动力输入轴驱动装置连接;主轴,位于壳腔内;凸轮摆臂左、右支承盘相互对应且固定连接,凸轮摆臂左支承盘背对凸轮摆臂右支承盘的一侧有支承盘驱动齿轮,支承盘驱动齿轮与动力输入轴齿轮啮合,主轴的左端支承在支承盘驱动齿轮上、右端伸展至机壳外,凸轮摆臂右支承盘支承在提综凸轮固定座上,提综凸轮以及凸轮摆臂机构位于凸轮摆臂左支承盘与凸轮摆臂右支承盘之间。保障传动稳

凸轮机构传动.ppt
第九章凸轮机构传动第九章凸轮机构传动目录发动机的配气机构中的凸轮轮廓是怎样形成的?它具有怎样的特性呢?它是如何保证汽车的紧密性的呢?凸轮传动是通过凸轮与从动件之间的接触来传递运动和动力的,是一种常用的高副机构。只要做出适当的凸轮轮廓,就可以使从动件得到预定的复杂运动规律。图1所示为内燃机配气凸轮机构。凸轮1以等角速度回转时,它的轮廓驱动从动件2(阀杆)按预期的运动规律启闭阀门。图1内燃机配气凸轮机构配气机构凸轮图9-2汽车快怠速机构1.凸轮——具有曲线状轮廓的构件2.从动件——作往复移动或摆动的构件往复移
凸轮传动机构.pdf
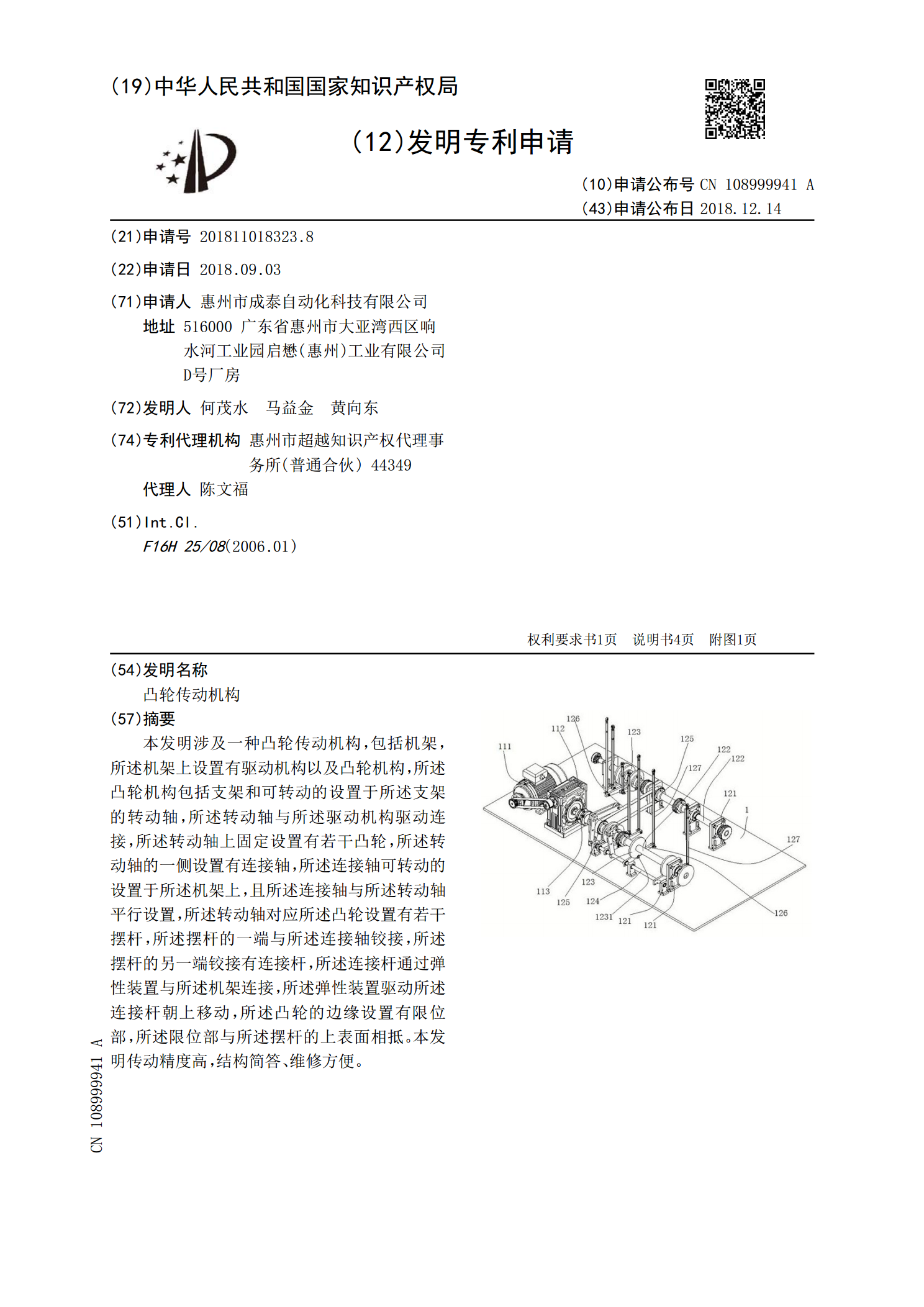
本发明涉及一种凸轮传动机构,包括机架,所述机架上设置有驱动机构以及凸轮机构,所述凸轮机构包括支架和可转动的设置于所述支架的转动轴,所述转动轴与所述驱动机构驱动连接,所述转动轴上固定设置有若干凸轮,所述转动轴的一侧设置有连接轴,所述连接轴可转动的设置于所述机架上,且所述连接轴与所述转动轴平行设置,所述转动轴对应所述凸轮设置有若干摆杆,所述摆杆的一端与所述连接轴铰接,所述摆杆的另一端铰接有连接杆,所述连接杆通过弹性装置与所述机架连接,所述弹性装置驱动所述连接杆朝上移动,所述凸轮的边缘设置有限位部,所述限位部与

圆织机大凸轮与综丝杆起落组件的传动机构.pdf
本发明涉及一种圆织机大凸轮与综丝杆起落组件的传动机构,包括机座,所述机座上设置有可做水平转动的大凸轮,所述大凸轮侧壁设置有呈正弦曲线状分布的上导轨和下导轨,导轨外凸于大凸轮侧壁;所述大凸轮四周的机座上设置有多个综丝杆起落工位,所述综丝杆起落工位设置有两个可做上下运动的导向装置,分别为上导向装置和下导向装置;所述导向装置后侧开设有用于与导轨配合的导槽,所述上导轨插入上导向装置的上导槽内,所述下导轨插图下导向装置的下导槽内。通过大凸轮上的导轨作为外凸结构,与导向装置后侧的一对跑轮配合,降低传动过程中的摩擦力,