
钢轨磨耗测量方法及装置.pdf

白凡****12

1/10
2/10
3/10
4/10
5/10
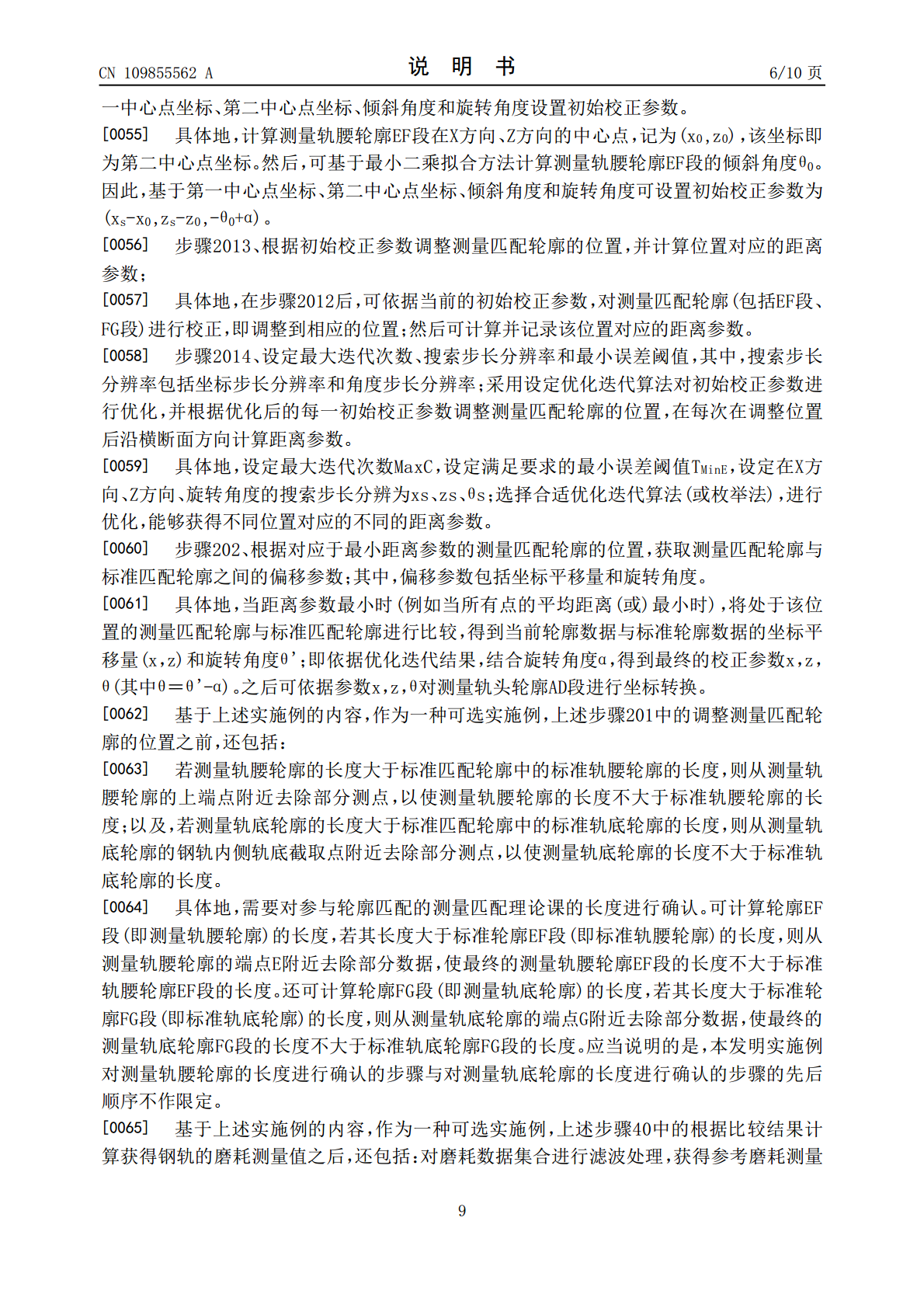
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
钢轨磨耗测量方法及装置.pdf
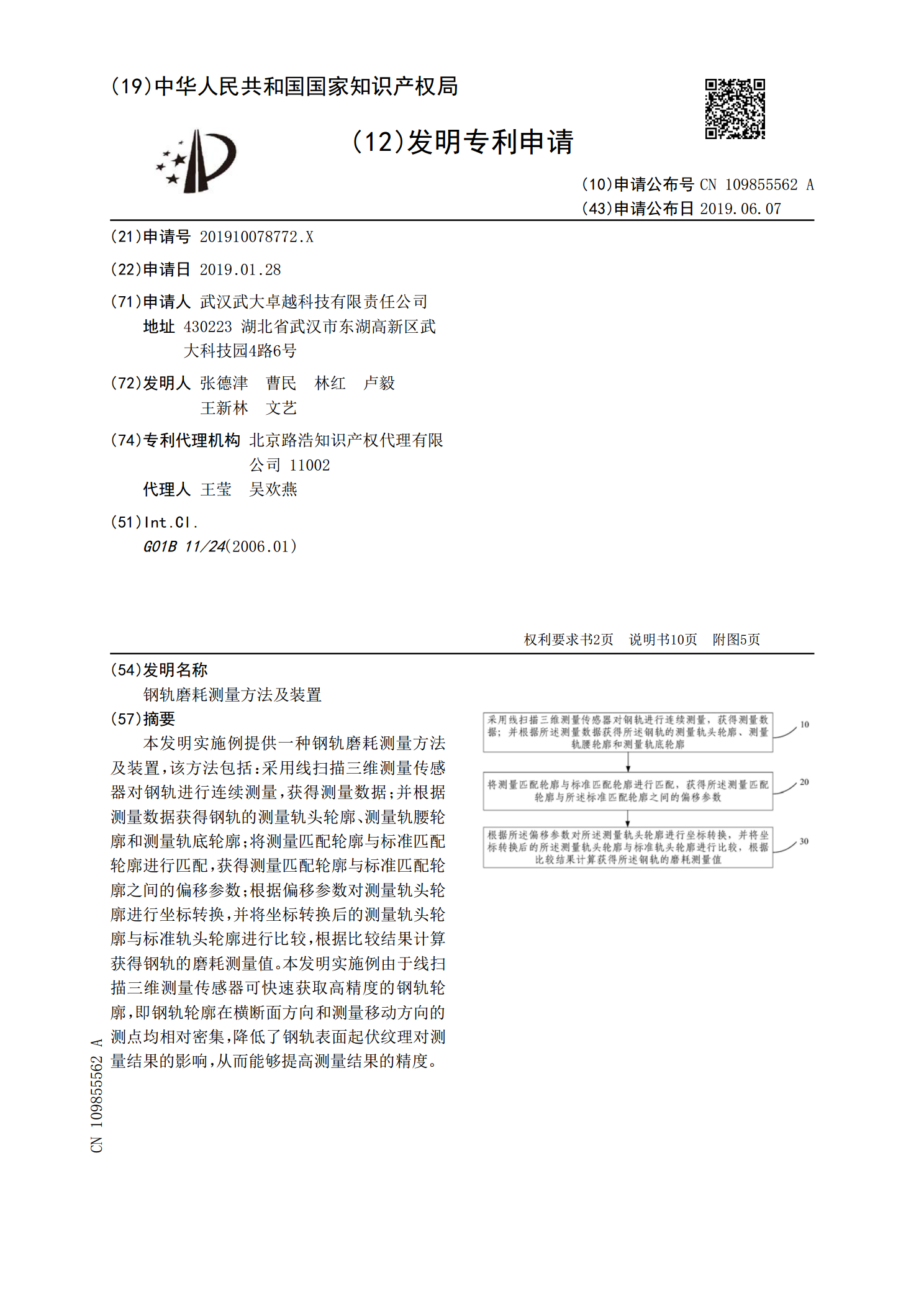
本发明实施例提供一种钢轨磨耗测量方法及装置,该方法包括:采用线扫描三维测量传感器对钢轨进行连续测量,获得测量数据;并根据测量数据获得钢轨的测量轨头轮廓、测量轨腰轮廓和测量轨底轮廓;将测量匹配轮廓与标准匹配轮廓进行匹配,获得测量匹配轮廓与标准匹配轮廓之间的偏移参数;根据偏移参数对测量轨头轮廓进行坐标转换,并将坐标转换后的测量轨头轮廓与标准轨头轮廓进行比较,根据比较结果计算获得钢轨的磨耗测量值。本发明实施例由于线扫描三维测量传感器可快速获取高精度的钢轨轮廓,即钢轨轮廓在横断面方向和测量移动方向的测点均相对密集

基于动态模板的钢轨磨耗测量方法.pdf
本发明提出一种基于动态模板的钢轨磨耗测量方法,该方法的步骤包括:在两根钢轨内侧上方分别安装CCD摄像机和扇形激光光源;标定每个CCD摄像机及光平面参数;根据钢轨轮廓空间计算模型获取图像中钢轨轮廓每个像素点的空间坐标;提取轨腰及轨头下端特征点坐标;基于特征点生成钢轨轮廓标准模板;对比钢轨测量轮廓和标准模板得到磨耗值。该方法只需确定测量钢轨两个特征点即能根据标准钢轨轮廓的几何关系建立测量坐标系,且能快速、精确的得到标准模板,不需要将测量轮廓和基准设计轮廓进行对齐分析,打破了传统的基于静态模板匹配难的问题,极大

非接触式钢轨磨耗检测装置.pdf
本发明公开一种非接触式钢轨磨耗检测装置,该钢轨磨耗检测装置包括走行部分、检测部分、数据采集部分以及显示设备四个部分。本发明的优点在于:走行部分由在传统的只有两个纵向走行轮的基础上增加了八个小走行轮组成,可以保证装置在推行的过程中不会发生掉道的情况,测量装置采用非接触式测量方式,能够在装置的推行过程中完成磨耗测量,具有较高的效率,同时测量点位具有连续性,该方式具有较高的精度和可靠性,装置具有好的适用性。
钢轨廓形对齐方法及装置、钢轨磨耗计算方法及装置.pdf
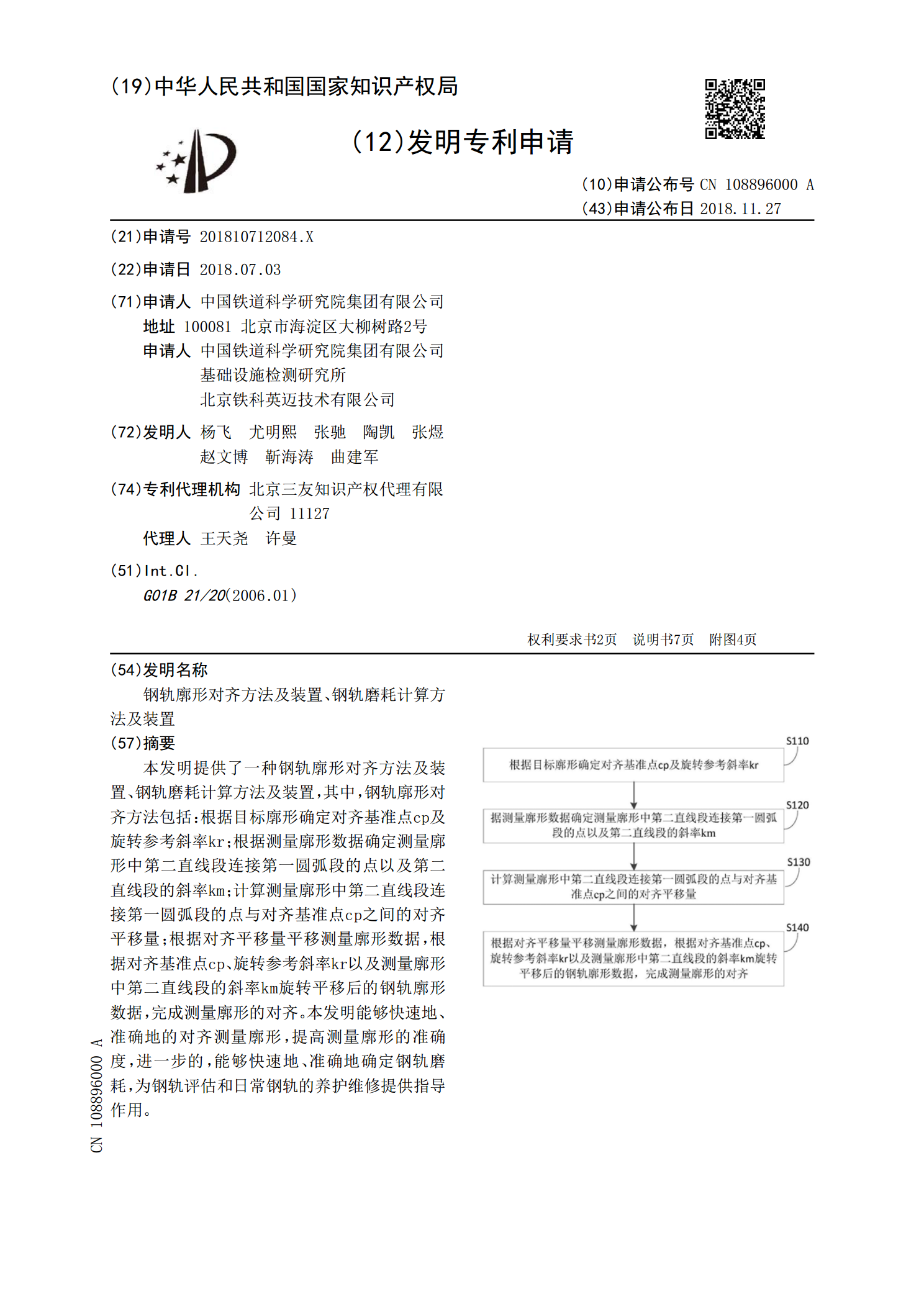
本发明提供了一种钢轨廓形对齐方法及装置、钢轨磨耗计算方法及装置,其中,钢轨廓形对齐方法包括:根据目标廓形确定对齐基准点cp及旋转参考斜率kr;根据测量廓形数据确定测量廓形中第二直线段连接第一圆弧段的点以及第二直线段的斜率km;计算测量廓形中第二直线段连接第一圆弧段的点与对齐基准点cp之间的对齐平移量;根据对齐平移量平移测量廓形数据,根据对齐基准点cp、旋转参考斜率kr以及测量廓形中第二直线段的斜率km旋转平移后的钢轨廓形数据,完成测量廓形的对齐。本发明能够快速地、准确地的对齐测量廓形,提高测量廓形的准确度

钢轨振动测量方法及装置.pdf
本发明公开了一种钢轨振动测量方法及装置,其中该方法包括:根据相机阵列采集的标记板的图像,对相机阵列进行标定,得到相机阵列的标定参数;采集相机阵列拍摄的、不同时刻下的钢轨上预设标记点的图像;根据相机阵列的标定参数、和不同时序下的钢轨上预设标记点的图像,对标记点进行三维重构,得到每一时刻下标记点的三维空间位置坐标;根据每一时刻下标记点的三维空间位置坐标,计算标记点随时间的空间位置变化方向、变化幅度和变化频率;将标记点随时间的空间位置变化方向、变化幅度和变化频率,分别作为钢轨振动的振动方向、振动幅度和振动频率。