
基于BP神经网络的轮速传感器齿圈表面缺陷检测方法.pdf

是你****嘉嘉

1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于BP神经网络的轮速传感器齿圈表面缺陷检测方法.pdf
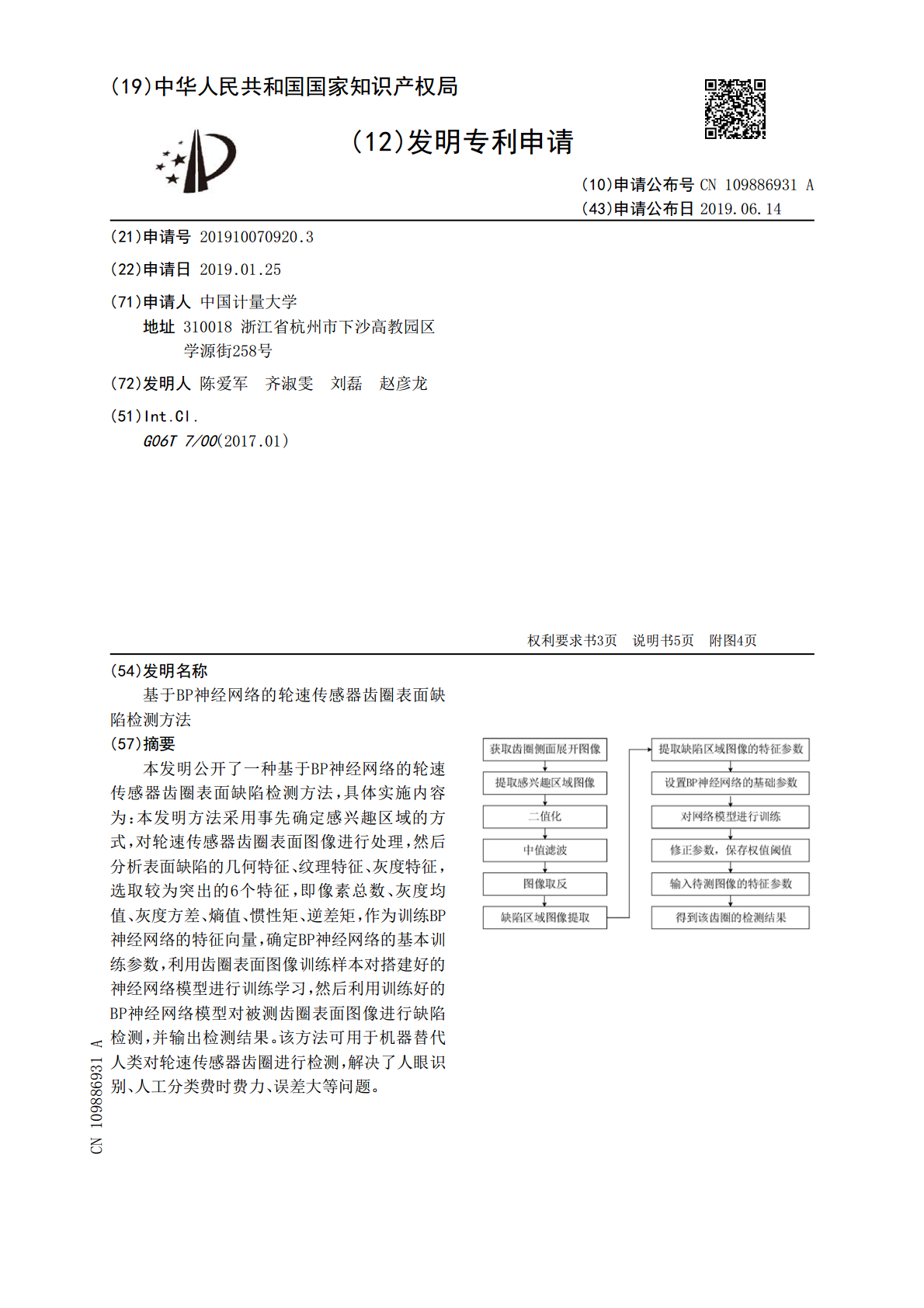
本发明公开了一种基于BP神经网络的轮速传感器齿圈表面缺陷检测方法,具体实施内容为:本发明方法采用事先确定感兴趣区域的方式,对轮速传感器齿圈表面图像进行处理,然后分析表面缺陷的几何特征、纹理特征、灰度特征,选取较为突出的6个特征,即像素总数、灰度均值、灰度方差、熵值、惯性矩、逆差矩,作为训练BP神经网络的特征向量,确定BP神经网络的基本训练参数,利用齿圈表面图像训练样本对搭建好的神经网络模型进行训练学习,然后利用训练好的BP神经网络模型对被测齿圈表面图像进行缺陷检测,并输出检测结果。该方法可用于机器替代人类
基于SVM的轮速传感器齿圈表面缺陷检测方法.pdf
本发明公开了一种基于SVM的轮速传感器齿圈表面缺陷检测方法,具体实施内容为:本发明方法采用事先确定感兴趣区域图像的方法,在感兴趣图像中提取缺陷区域图像,从几何特征、灰度特征、纹理特征三个方面选取6个突出的特征参数:像素总数、灰度均值、灰度方差、熵值、惯性矩、逆差矩,构成特征向量;构造SVM的一对一多分类器,利用训练样本的特征向量通过粒子群算法对SVM模型中的惩罚因子C和核参数g进行优化,获取最佳预测模型,最后将待测齿圈展开图像样本的特征向量输入到SVM模型中,进行缺陷检测。该方法可用于机器替代人类对轮速传
基于BP神经网络的玻璃缺陷检测方法.pdf
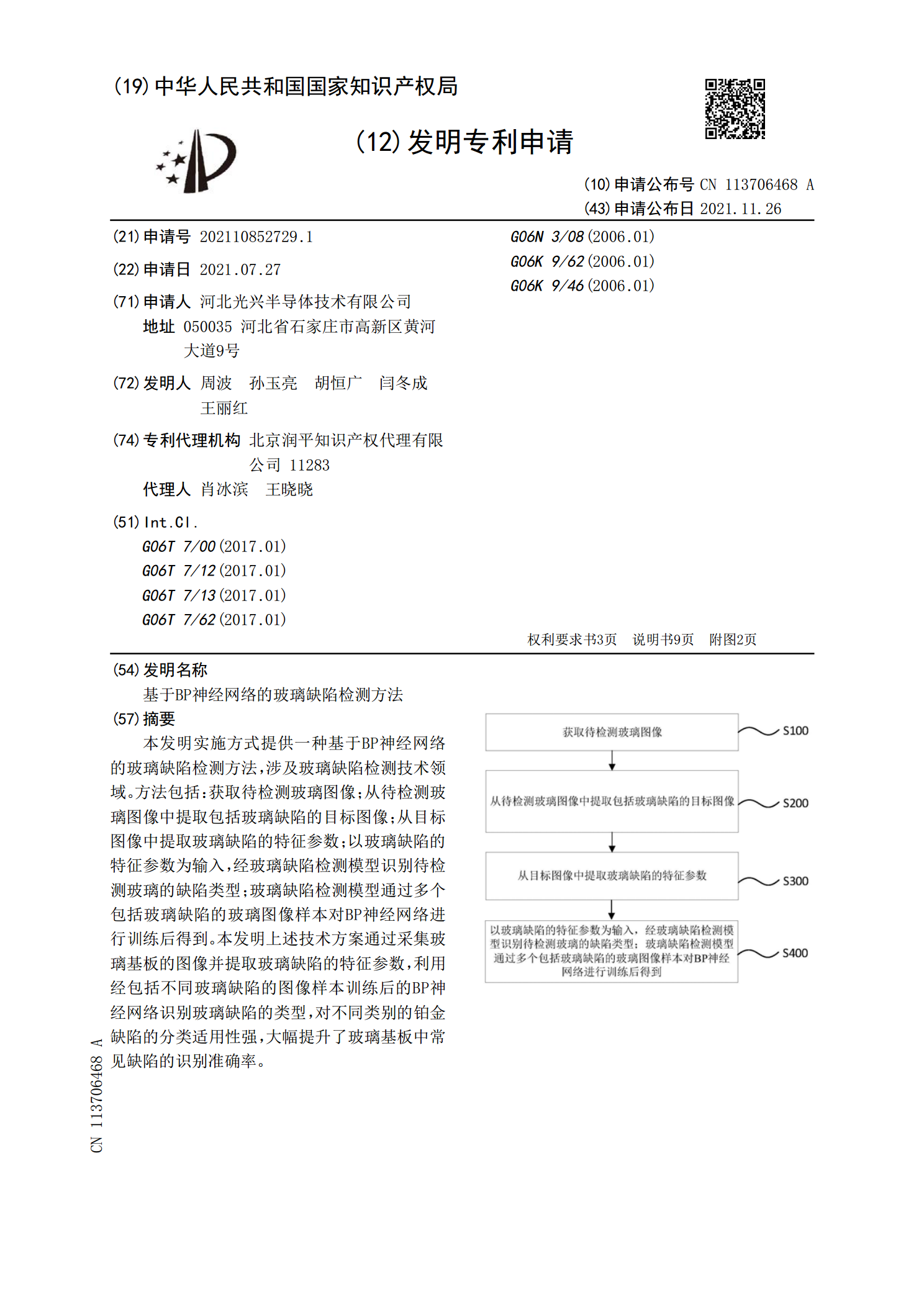
本发明实施方式提供一种基于BP神经网络的玻璃缺陷检测方法,涉及玻璃缺陷检测技术领域。方法包括:获取待检测玻璃图像;从待检测玻璃图像中提取包括玻璃缺陷的目标图像;从目标图像中提取玻璃缺陷的特征参数;以玻璃缺陷的特征参数为输入,经玻璃缺陷检测模型识别待检测玻璃的缺陷类型;玻璃缺陷检测模型通过多个包括玻璃缺陷的玻璃图像样本对BP神经网络进行训练后得到。本发明上述技术方案通过采集玻璃基板的图像并提取玻璃缺陷的特征参数,利用经包括不同玻璃缺陷的图像样本训练后的BP神经网络识别玻璃缺陷的类型,对不同类别的铂金缺陷的分
基于机器视觉的密封圈表面缺陷检测方法.pdf
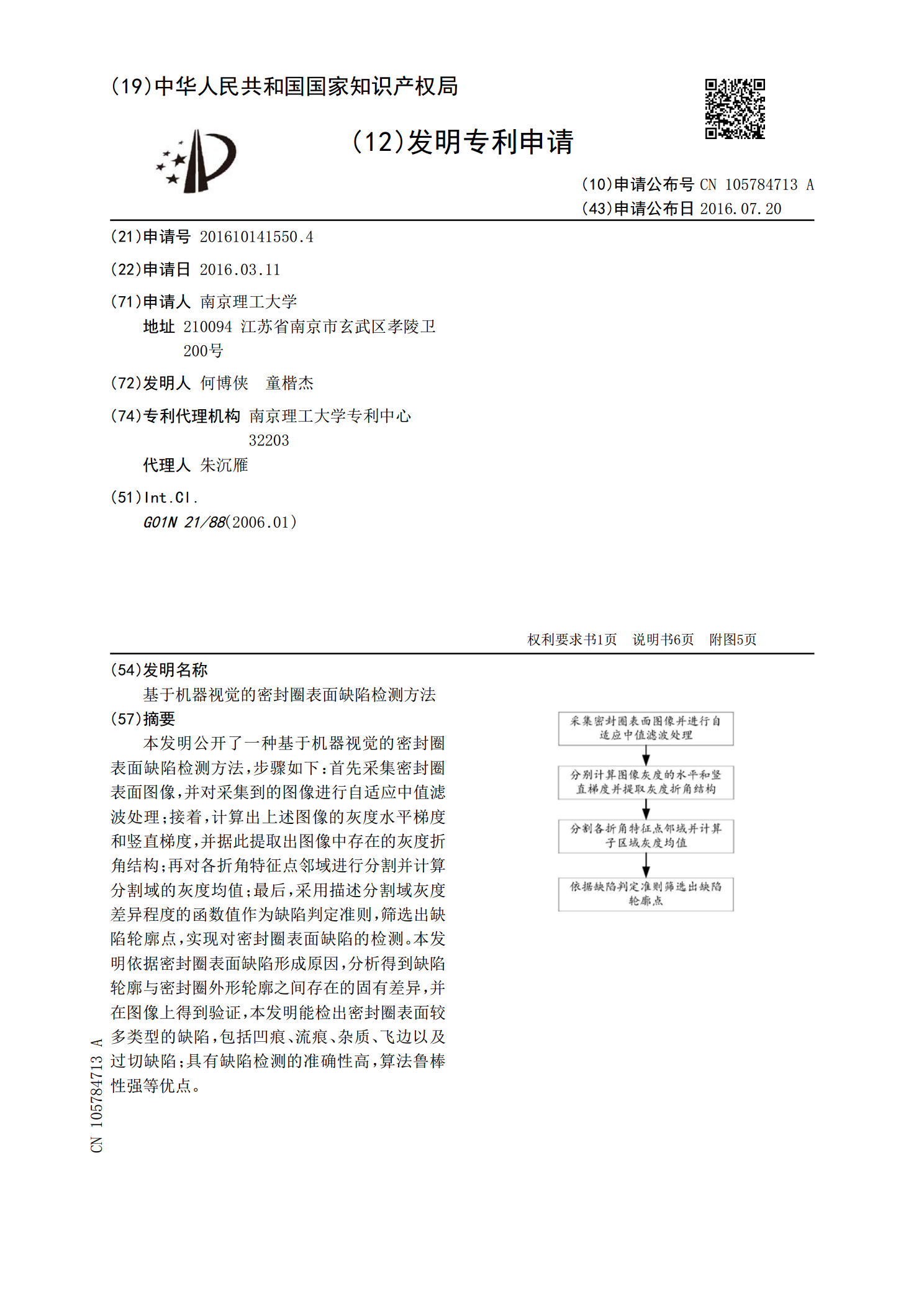
本发明公开了一种基于机器视觉的密封圈表面缺陷检测方法,步骤如下:首先采集密封圈表面图像,并对采集到的图像进行自适应中值滤波处理;接着,计算出上述图像的灰度水平梯度和竖直梯度,并据此提取出图像中存在的灰度折角结构;再对各折角特征点邻域进行分割并计算分割域的灰度均值;最后,采用描述分割域灰度差异程度的函数值作为缺陷判定准则,筛选出缺陷轮廓点,实现对密封圈表面缺陷的检测。本发明依据密封圈表面缺陷形成原因,分析得到缺陷轮廓与密封圈外形轮廓之间存在的固有差异,并在图像上得到验证,本发明能检出密封圈表面较多类型的缺陷

神经网络优化方法bp算法缺陷.pptx
第3章神经网络优化方法3.1BP网络学习算法改进3.1BP网络学习算法改进3.1BP网络学习算法改进3.1BP网络学习算法改进3.1BP网络学习算法改进3.1BP网络学习算法改进3.1.1消除样本输入次序影响改进算法3.1.1消除样本输入次序影响改进算法3.1.2附加动量改进算法3.1.3采取自适应调整参数改进算法3.1.4使用弹性方法改进算法3.1.5使用拟牛顿法改进算法3.1.6基于共轭梯度法改进算法3.1.6基于共轭梯度法改进算法3.1.7基于Levenberg-Marquardt法改进算法BP神经