
一种重载机车智能撒砂控制系统及控制方法.pdf

书生****35


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种重载机车智能撒砂控制系统及控制方法.pdf
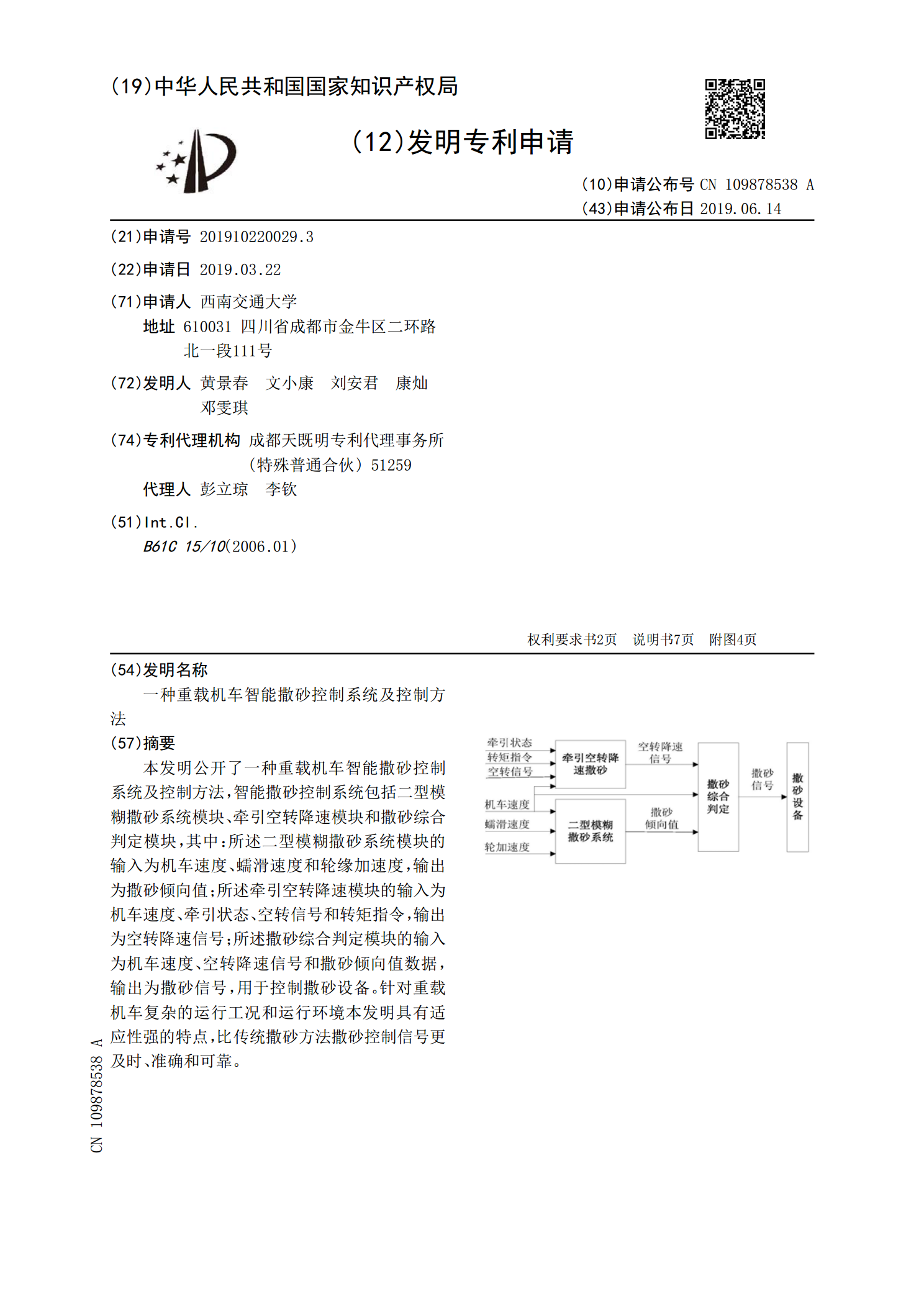
本发明公开了一种重载机车智能撒砂控制系统及控制方法,智能撒砂控制系统包括二型模糊撒砂系统模块、牵引空转降速模块和撒砂综合判定模块,其中:所述二型模糊撒砂系统模块的输入为机车速度、蠕滑速度和轮缘加速度,输出为撒砂倾向值;所述牵引空转降速模块的输入为机车速度、牵引状态、空转信号和转矩指令,输出为空转降速信号;所述撒砂综合判定模块的输入为机车速度、空转降速信号和撒砂倾向值数据,输出为撒砂信号,用于控制撒砂设备。针对重载机车复杂的运行工况和运行环境本发明具有适应性强的特点,比传统撒砂方法撒砂控制信号更及时、准确和
机车撒砂控制方法.pdf
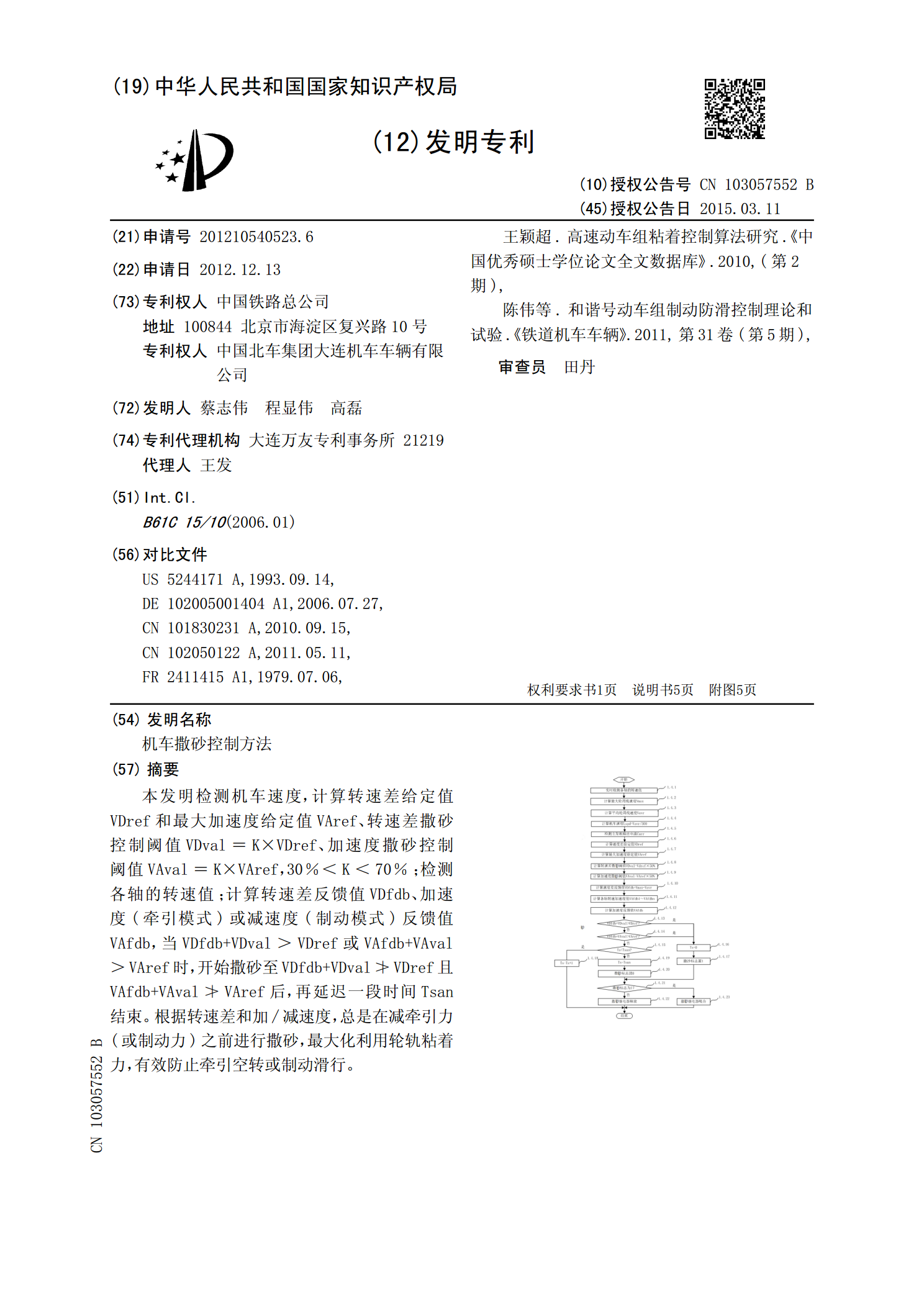
本发明的一种机车撒砂控制方法,检测机车速度,计算转速差给定值VDref和最大加速度给定值VAref;计算转速差撒沙控制阈值VDval=K×VDref,计算加速度撒沙控制阈值VAval=K×VAref,30%VDref或VAfdb+VAval>VAref时,开始撒砂至VDfdb+VDval≯VDref?且VAfdb+VAval≯VAref后,再延迟一段时间Tsan结束。撒沙控制取决于转速差和加/减速度,并且总是在减牵引力(或制动力)之前进行,最大化地利用轮轨粘着力,并且有效防止牵引空转或制动滑行。

一种机车撒砂装置及控制方法.pdf
本发明涉及轨道机车撒砂控制系统,尤指一种用于机车安全运行的撒砂装置及控制方法,该装置通过控制撒砂控制器中电机和齿轮的转速来控制撒砂量的大小;该控制方法根据速度传感器的信号判断各轮对的滑行状态,中央处理单元将控制变速电机以相应的转速转动,并带动撒砂齿轮转动,从而控制撒砂量的大小;该控制方法根据接收到的紧急、轨面条件和强制撒砂等信号,结合相关判据,控制撒砂电控阀的得、失电和变速电机的转速。因此,本发明所述机车撒砂装置及控制方法,安全可靠、结构巧妙、防滑效果好,可最大限度的利用轨面粘着,减小制动距离,减少车轮的
一种电机车撒砂装置.pdf
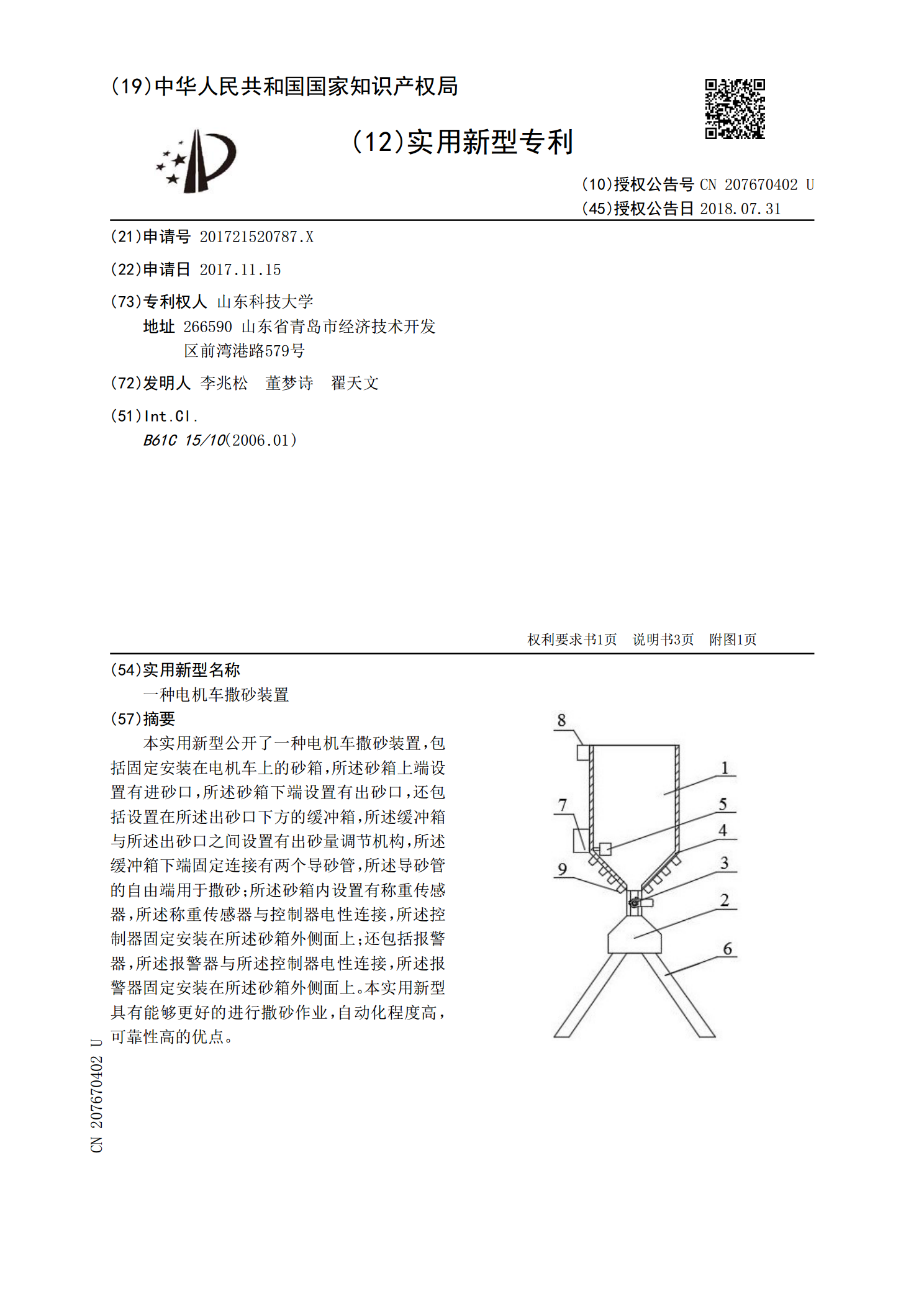
本实用新型公开了一种电机车撒砂装置,包括固定安装在电机车上的砂箱,所述砂箱上端设置有进砂口,所述砂箱下端设置有出砂口,还包括设置在所述出砂口下方的缓冲箱,所述缓冲箱与所述出砂口之间设置有出砂量调节机构,所述缓冲箱下端固定连接有两个导砂管,所述导砂管的自由端用于撒砂;所述砂箱内设置有称重传感器,所述称重传感器与控制器电性连接,所述控制器固定安装在所述砂箱外侧面上;还包括报警器,所述报警器与所述控制器电性连接,所述报警器固定安装在所述砂箱外侧面上。本实用新型具有能够更好的进行撒砂作业,自动化程度高,可靠性高的
一种电机车的撒砂装置.pdf
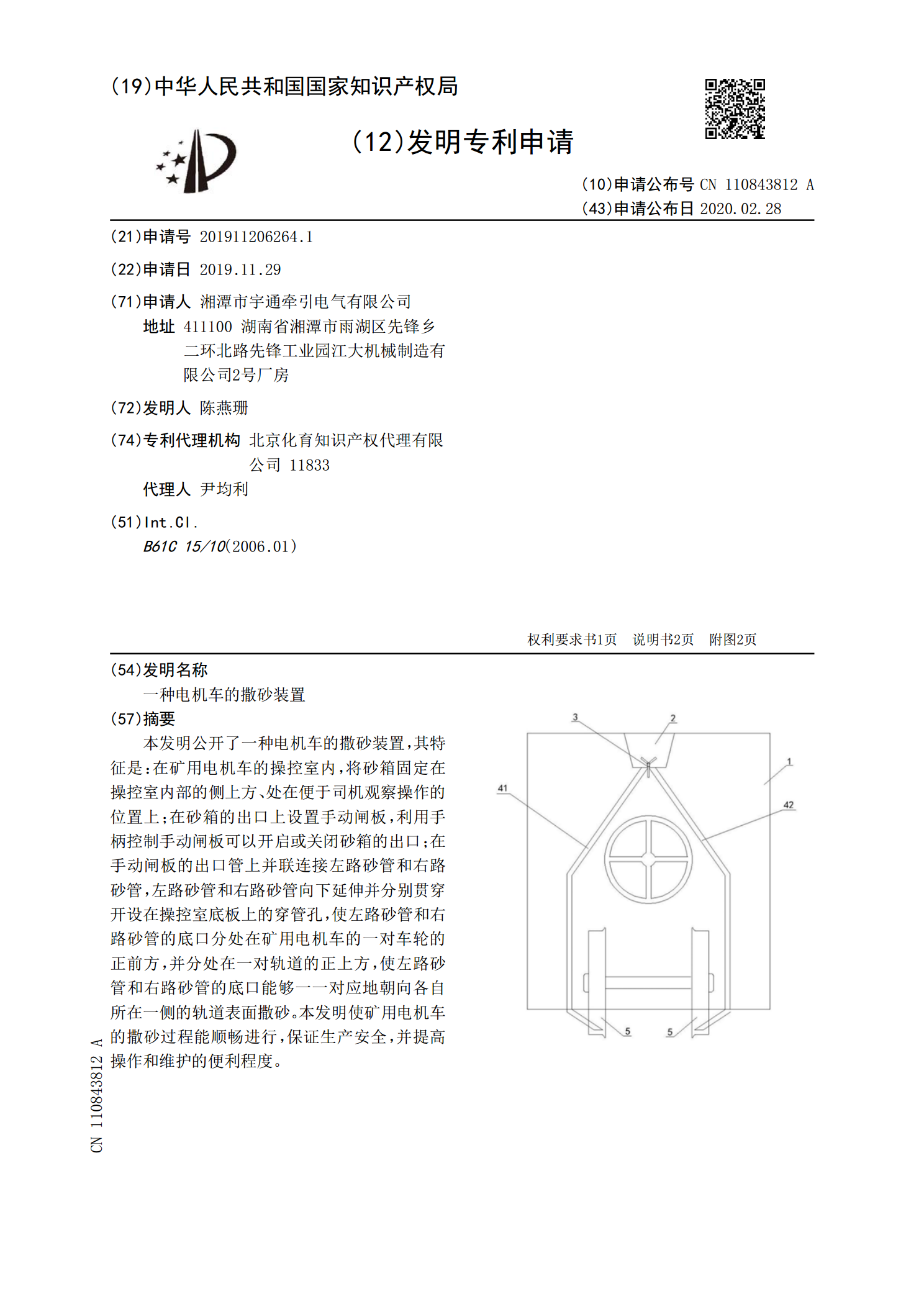
本发明公开了一种电机车的撒砂装置,其特征是:在矿用电机车的操控室内,将砂箱固定在操控室内部的侧上方、处在便于司机观察操作的位置上;在砂箱的出口上设置手动闸板,利用手柄控制手动闸板可以开启或关闭砂箱的出口;在手动闸板的出口管上并联连接左路砂管和右路砂管,左路砂管和右路砂管向下延伸并分别贯穿开设在操控室底板上的穿管孔,使左路砂管和右路砂管的底口分处在矿用电机车的一对车轮的正前方,并分处在一对轨道的正上方,使左路砂管和右路砂管的底口能够一一对应地朝向各自所在一侧的轨道表面撒砂。本发明使矿用电机车的撒砂过程能顺畅