
基于低秩-稀疏逼近的行星齿轮箱故障诊断方法.pdf

猫巷****奕声

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于低秩-稀疏逼近的行星齿轮箱故障诊断方法.pdf
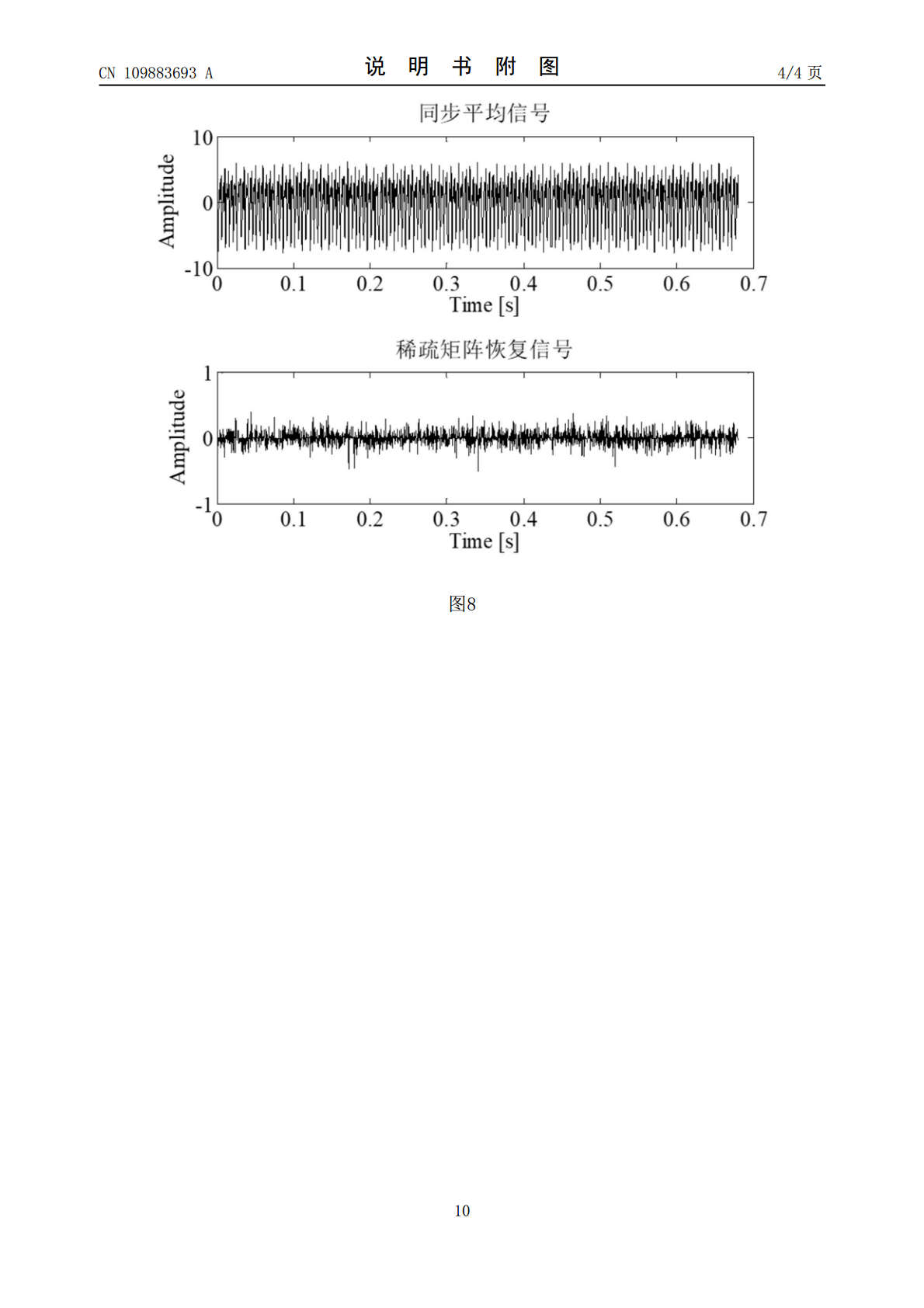
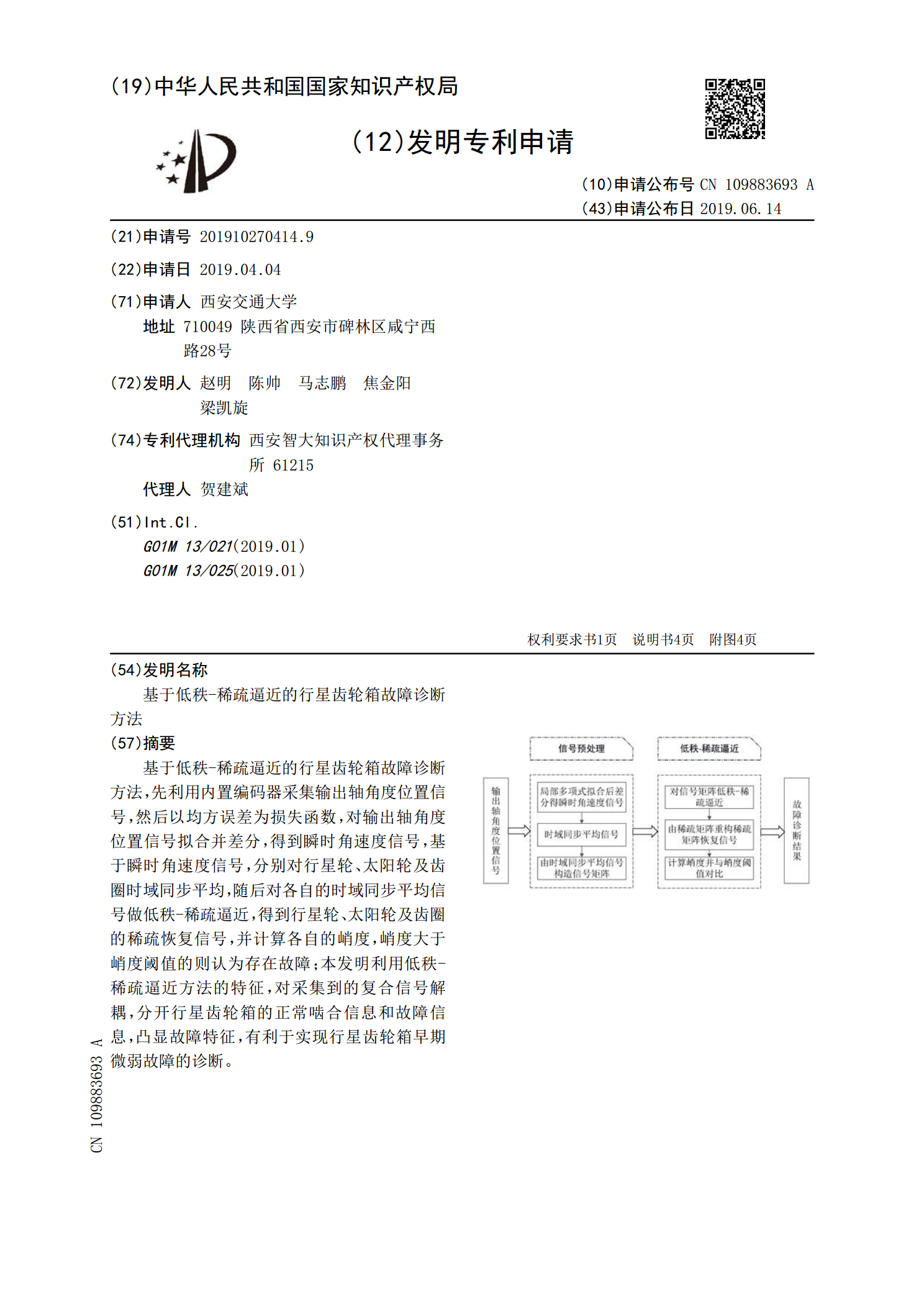
基于低秩‑稀疏逼近的行星齿轮箱故障诊断方法,先利用内置编码器采集输出轴角度位置信号,然后以均方误差为损失函数,对输出轴角度位置信号拟合并差分,得到瞬时角速度信号,基于瞬时角速度信号,分别对行星轮、太阳轮及齿圈时域同步平均,随后对各自的时域同步平均信号做低秩‑稀疏逼近,得到行星轮、太阳轮及齿圈的稀疏恢复信号,并计算各自的峭度,峭度大于峭度阈值的则认为存在故障;本发明利用低秩‑稀疏逼近方法的特征,对采集到的复合信号解耦,分开行星齿轮箱的正常啮合信息和故障信息,凸显故障特征,有利于实现行星齿轮箱早期微弱故障的诊
基于共振稀疏分解和FastICA算法的行星齿轮箱故障诊断方法.pdf
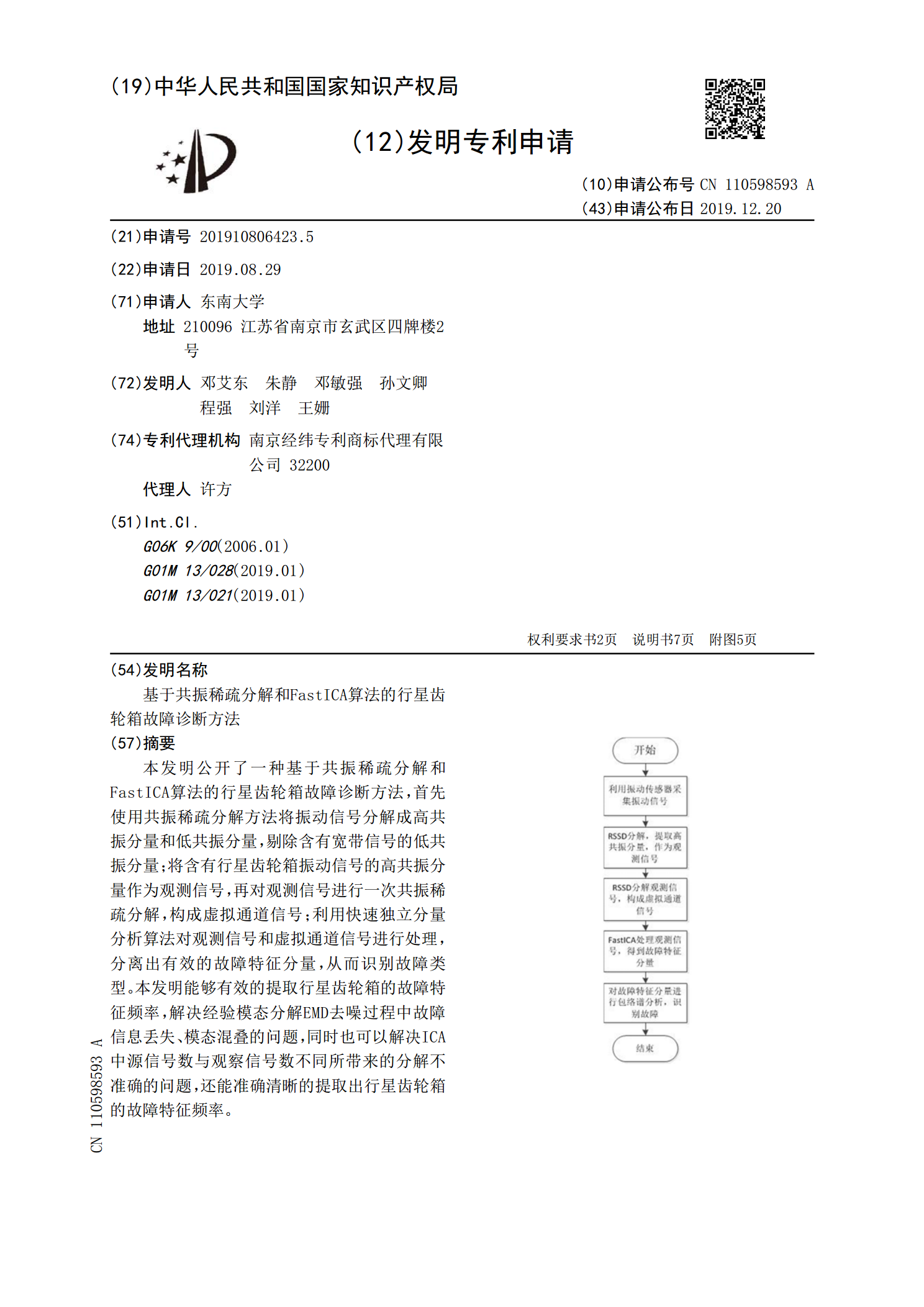
本发明公开了一种基于共振稀疏分解和FastICA算法的行星齿轮箱故障诊断方法,首先使用共振稀疏分解方法将振动信号分解成高共振分量和低共振分量,剔除含有宽带信号的低共振分量;将含有行星齿轮箱振动信号的高共振分量作为观测信号,再对观测信号进行一次共振稀疏分解,构成虚拟通道信号;利用快速独立分量分析算法对观测信号和虚拟通道信号进行处理,分离出有效的故障特征分量,从而识别故障类型。本发明能够有效的提取行星齿轮箱的故障特征频率,解决经验模态分解EMD去噪过程中故障信息丢失、模态混叠的问题,同时也可以解决ICA中源信
基于共振稀疏分解和FastICA算法的行星齿轮箱故障诊断方法.pdf
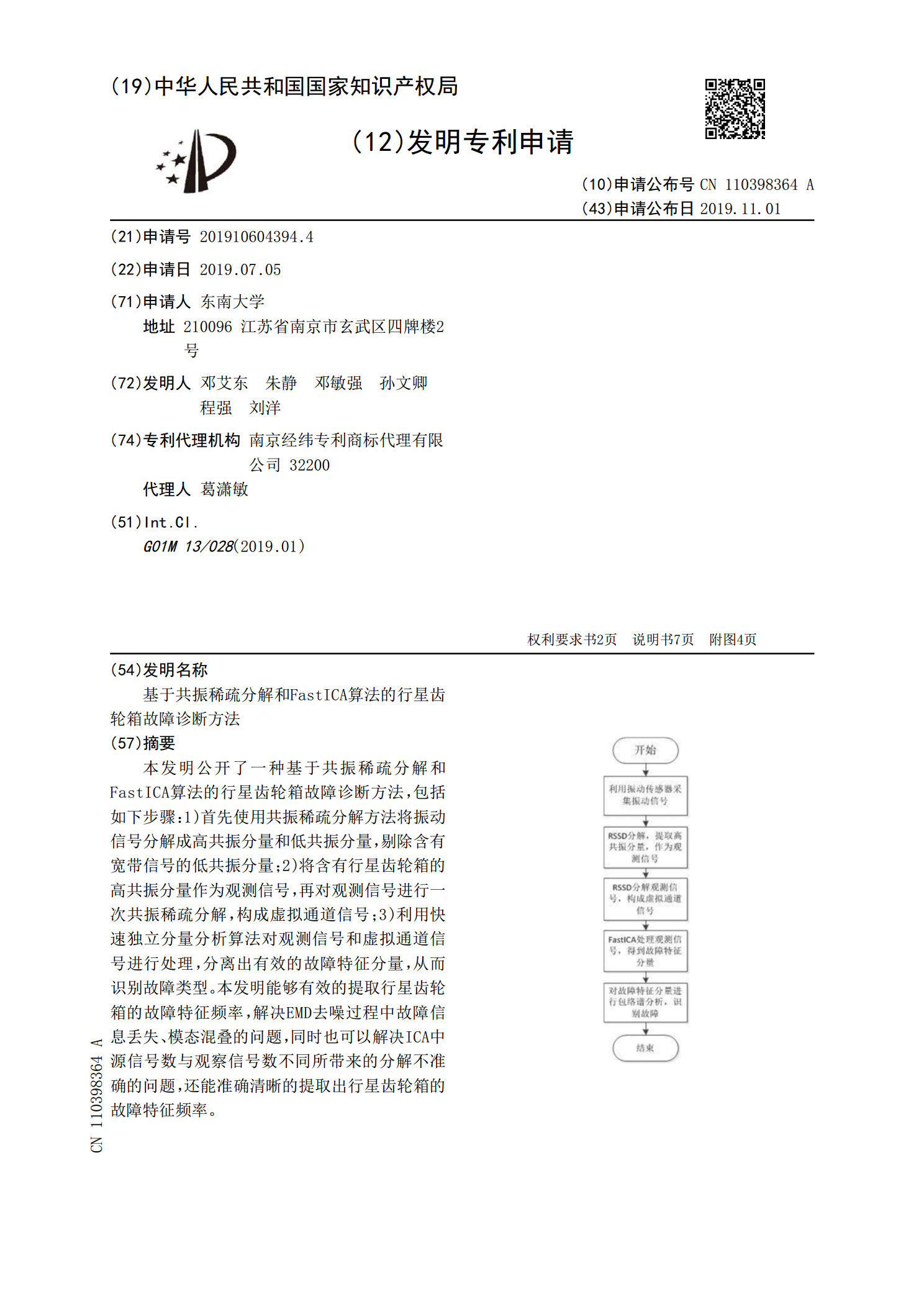
本发明公开了一种基于共振稀疏分解和FastICA算法的行星齿轮箱故障诊断方法,包括如下步骤:1)首先使用共振稀疏分解方法将振动信号分解成高共振分量和低共振分量,剔除含有宽带信号的低共振分量;2)将含有行星齿轮箱的高共振分量作为观测信号,再对观测信号进行一次共振稀疏分解,构成虚拟通道信号;3)利用快速独立分量分析算法对观测信号和虚拟通道信号进行处理,分离出有效的故障特征分量,从而识别故障类型。本发明能够有效的提取行星齿轮箱的故障特征频率,解决EMD去噪过程中故障信息丢失、模态混叠的问题,同时也可以解决ICA

基于低秩稀疏分解和PCNN的图像融合方法.pdf
本发明提出了一种基于图像低秩与稀疏成分分解和PCNN相结合的图像融合方法。首先在低秩分解的基础上,结合稀疏表示,通过不同的字典,对不同成分进行稀疏表达得到对应成分的编码系数。然后在融合过程中,采用一种“绝对值”取大的策略对低秩成分进行融合,以保留源图像的亮度信息;对于稀疏成分,不同于传统的融合策略,本发明采用梯度特征激励PCNN的方法进行融合,能更大程度保留更多的源图像边缘细节信息。最后,将低秩融合部分和稀疏部分相加,便得到最终的融合结果。针对不同类型的图像,本发明提出的方法无论在视觉效果还是客观指标上,
张量的低秩逼近.ppt
目录1.张量的基本概念张量的秩1.张量的基本概念Z(E)-特征值2.张量特征值的计算对称张量的US-特征值的计算:3.张量的秩1逼近和低秩逼近3.张量的秩1逼近和低秩逼近4.张量计算软件[A]GuyanNi,LiqunQiandMinruBai,GeometricmeasureofentanglementandU-eigenvaluesoftensors,SIAMJournalonMatrixAnalysisandApplications2014,35(1):73-87BasicDefinitions4.