
基于关联特征的定位方法.pdf

明轩****la

1/7

2/7

3/7
4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于关联特征的定位方法.pdf
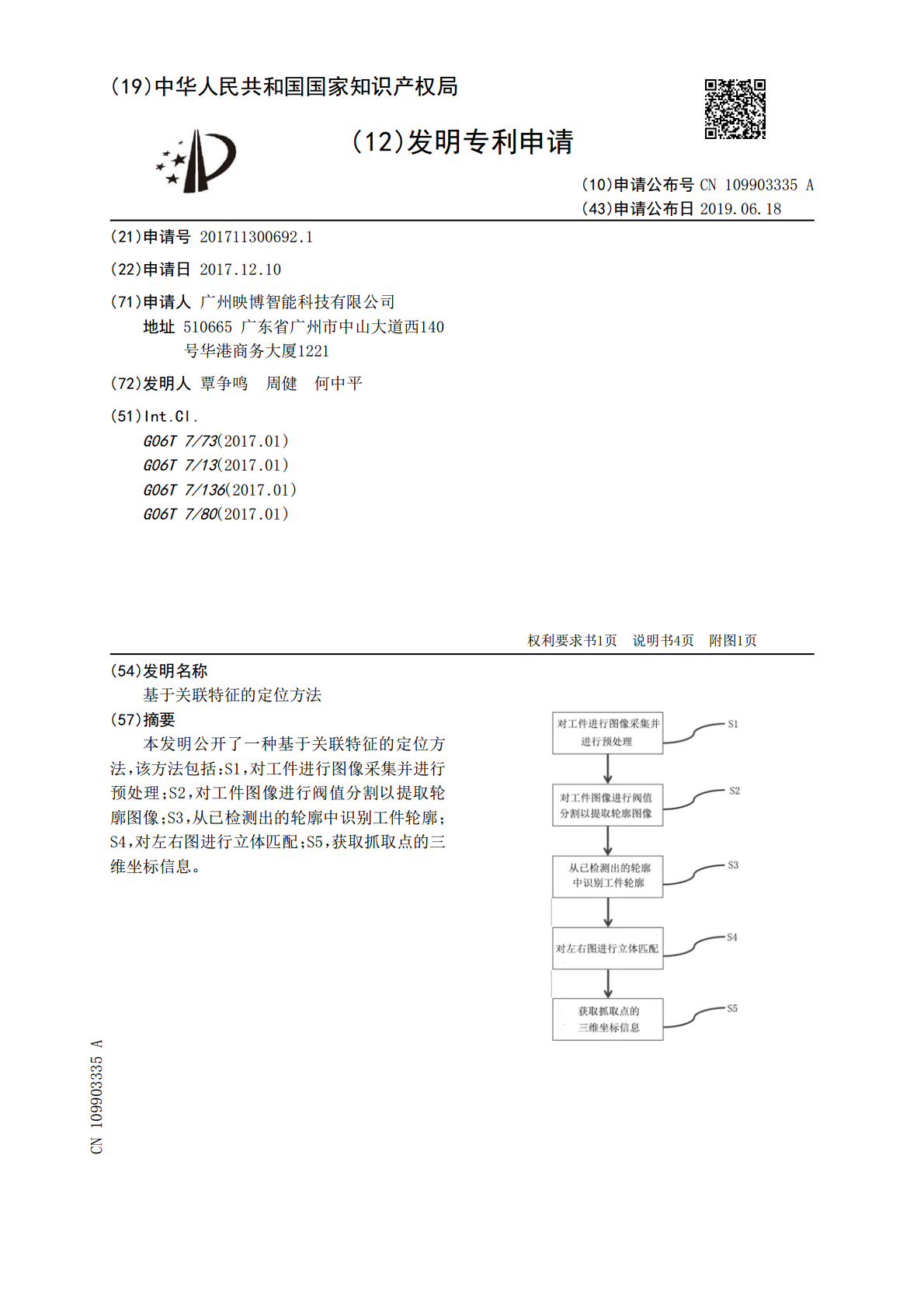
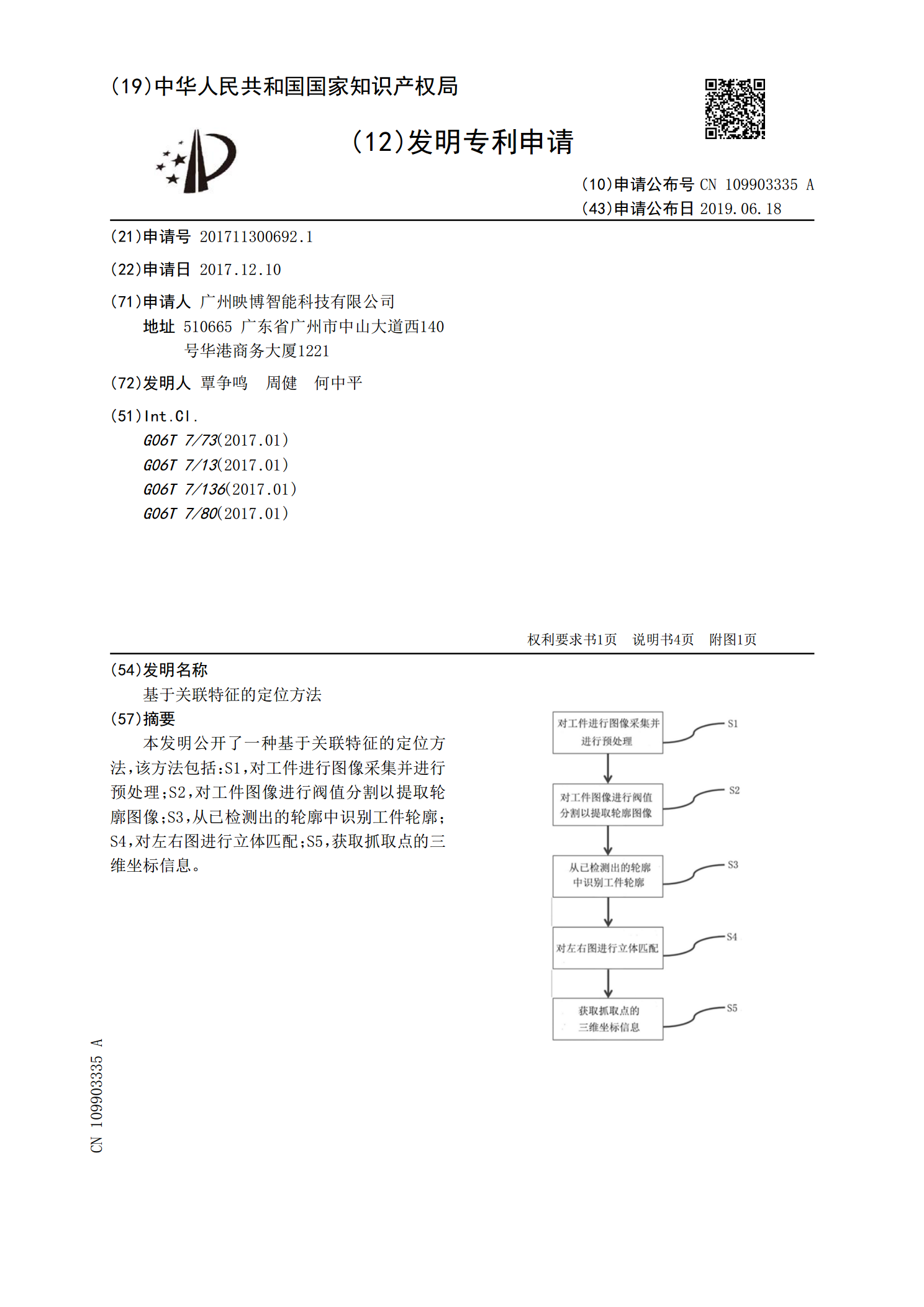
本发明公开了一种基于关联特征的定位方法,该方法包括:S1,对工件进行图像采集并进行预处理;S2,对工件图像进行阀值分割以提取轮廓图像;S3,从已检测出的轮廓中识别工件轮廓;S4,对左右图进行立体匹配;S5,获取抓取点的三维坐标信息。

基于动态切片和关联分析的错误定位方法.docx
基于动态切片和关联分析的错误定位方法摘要:随着计算机软件规模的不断扩大,错误定位在软件测试和维护中变得越来越重要。在传统的错误定位方法中,通常需要花费大量的时间和精力来分析日志文件、调用堆栈等信息。而基于动态切片和关联分析的错误定位方法则提供了一种更加高效和精确的错误定位方式。本文将详细介绍基于动态切片和关联分析的错误定位方法的原理、实现和应用,同时讨论其优缺点和未来研究方向。关键词:动态切片、关联分析、错误定位、测试、软件维护一、引言在软件开发和维护的过程中,错误是不可避免的。一旦发现错误,错误定位就成

基于特征值修正的特征点重定位方法.docx
基于特征值修正的特征点重定位方法基于特征值修正的特征点重定位方法摘要:特征点匹配是计算机视觉中的核心任务之一,特征点的准确重定位对于图像拼接、目标跟踪等任务具有重要意义。然而,由于图像的非刚性变形和噪声等因素的干扰,传统的特征点匹配方法在重定位精度上存在一定的局限性。为了提高特征点匹配的准确性和鲁棒性,本文提出了一种基于特征值修正的特征点重定位方法。该方法通过对特征向量进行特征值的修正和重排序,有效地提高了特征点的匹配性能。实验证明,该方法在不同场景下都能取得较好的重定位效果。关键词:特征点重定位;特征向

基于任务关联特征建模的音频分类方法研究.docx
基于任务关联特征建模的音频分类方法研究基于任务关联特征建模的音频分类方法研究摘要:音频分类作为音频信号处理中的一个重要任务,一直以来受到了广泛的关注。传统的音频分类方法主要基于音频信号的时域或频域特征进行建模,但这种方法往往忽略了任务与特征之间的关联性。因此,本文提出了一种基于任务关联特征建模的音频分类方法。该方法通过将任务特定的信息与音频特征进行融合,来提高音频分类的性能。实验证明,该方法在音频分类任务中取得了良好的效果。1.引言音频分类是将音频信号分为不同类别的任务,广泛应用于语音识别、音乐分类等领域

基于多特征组合的航迹关联方法研究.docx
基于多特征组合的航迹关联方法研究基于多特征组合的航迹关联方法研究摘要:随着航空交通的快速发展,对航迹数据的准确关联和分析变得越来越重要。传统的航迹关联方法主要使用基于时空位置的匹配算法,但它们往往无法充分利用航空数据中所携带的其他信息。本文提出了一种基于多特征组合的航迹关联方法,通过将时空位置、速度、加速度等特征进行组合,实现了对航迹数据的更加准确的关联和分析。实验结果表明,该方法能够提高航迹关联的准确性和效率,为航空交通管理提供有力支持。关键词:航迹关联,多特征组合,时空位置,速度,加速度1.引言随着航