
基于柔性臂的USV水面回收UUV的回收装置及方法.pdf

一吃****福乾


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于柔性臂的USV水面回收UUV的回收装置及方法.pdf
基于柔性臂的USV水面回收UUV的回收装置,其特征在于:包括回收控制模块、油路控制单元、液压充油装置、柔性捕获带和悬挂摆臂装置,所述回收控制模块设置在USV的船仓内,所述悬挂摆臂装置一端设置在USV上甲板上,另一端与液压充油装置连接,所述液压充油装置中心位置设置有一辊轮,所述柔性捕获带卷曲在辊轮上,所述油路控制单元设置在液压充油装置上;所述回收控制模块与油路控制单元、液压充油装置、柔性捕获带依次连接,同时,所述回收控制模块还与悬挂摆臂装置连接。本发明的有益效果是:本发明提出的回收方法采用柔性臂技术,适用于

面向USV自主回收UUV的动态捕获方法研究的任务书.docx
面向USV自主回收UUV的动态捕获方法研究的任务书任务书1.研究背景USV(UnmannedSurfaceVehicle)和UUV(UnmannedUnderwaterVehicle)是如今最为先进的水下/水上航行器,它们的广泛应用改变了传统的海洋科学作业以及海洋安全保障的方式。但是在实际的操作中,USV和UUV相互之间的配合依然存在着许多问题,其中最为重要的就是UUV的回收问题。在现有技术下,传统的回收方式多是通过远程操作或者在固定的地点实施回收,这种方式不仅受限于地理环境和气象条件,还存在一定的风险。

USV自主回收UUV动力学特性研究的开题报告.docx
USV自主回收UUV动力学特性研究的开题报告一、背景和研究意义USV(UnmannedSurfaceVehicle)和UUV(UnmannedUnderwaterVehicle)都是现代海洋智能装备中的重要一环。其中,USV作为平面水面航行器,可以在海洋中实现自主导航、巡航、测量、水质监测、环境调查等多种功能;UUV作为水下机器人,能够在海洋中进行水下勘探、海洋科学调查、水下搜索救援等任务。USV和UUV在海洋中的活动存在着很大的不确定性,对于自主回收的研究要求对于这两种机器人的动力学特性有深刻的了解。为
水面溢油回收装置.pdf
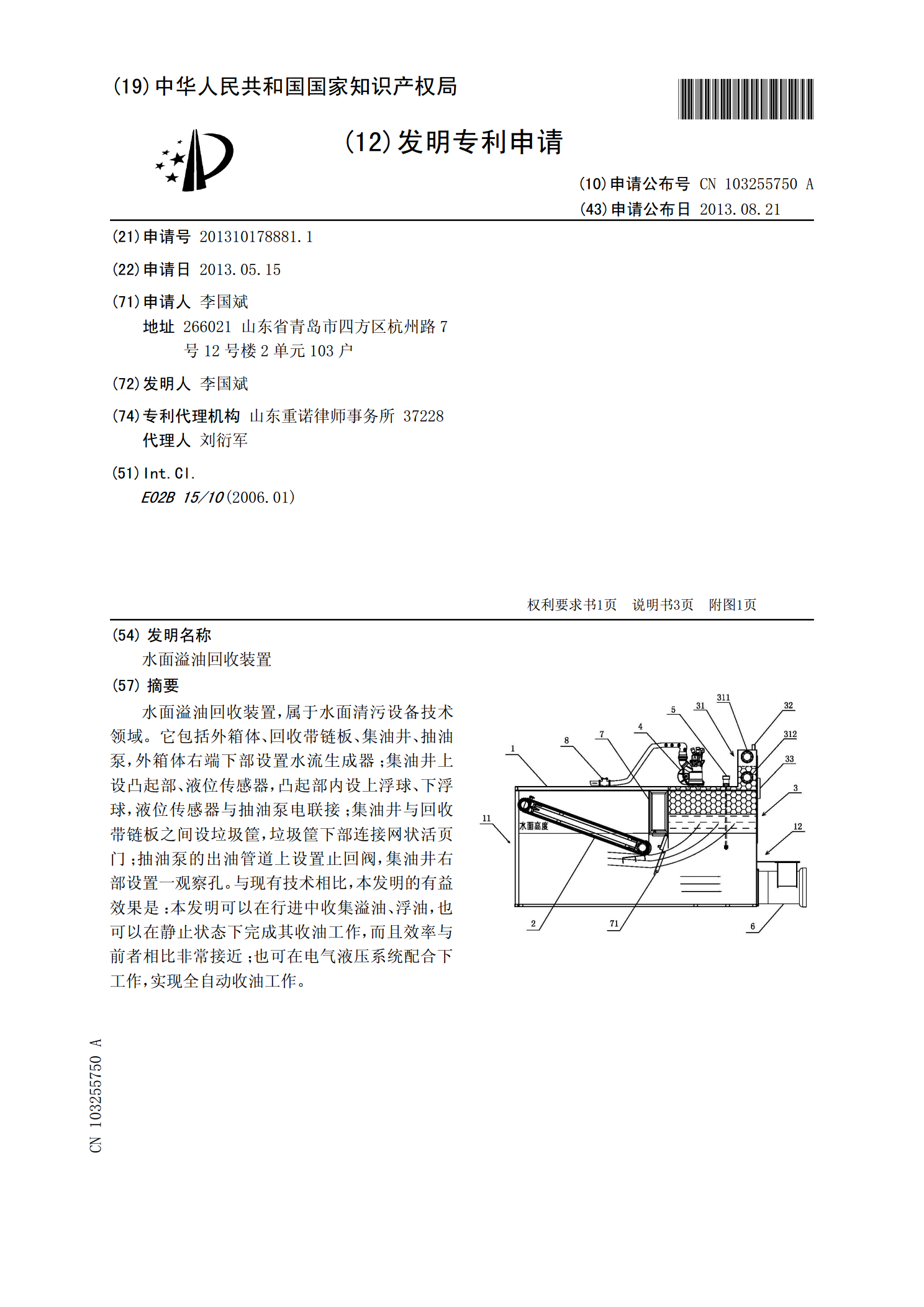
水面溢油回收装置,属于水面清污设备技术领域。它包括外箱体、回收带链板、集油井、抽油泵,外箱体右端下部设置水流生成器;集油井上设凸起部、液位传感器,凸起部内设上浮球、下浮球,液位传感器与抽油泵电联接;集油井与回收带链板之间设垃圾筐,垃圾筐下部连接网状活页门;抽油泵的出油管道上设置止回阀,集油井右部设置一观察孔。与现有技术相比,本发明的有益效果是:本发明可以在行进中收集溢油、浮油,也可以在静止状态下完成其收油工作,而且效率与前者相比非常接近;也可在电气液压系统配合下工作,实现全自动收油工作。

基于数值模拟的水面溢油回收装置优化.docx
基于数值模拟的水面溢油回收装置优化随着全球油藏开采的不断增加,水面溢油事件也愈发频繁,对海洋生态环境和人类的生命财产安全造成极大威胁。而水面溢油回收装置是遏制水面溢油扩散的重要手段之一。本文将基于数值模拟的方法,对水面溢油回收装置进行优化,提升其回收效率和自适应性。一、水面溢油回收装置的基本原理在海洋溢油事件中,水面上浮现的油污会受到海流、风向等各种因素的影响,不断地扩散和漂移。因此,水面溢油回收装置的主要任务是将漂浮在水面上的油污吸收、分离和储存。现有的水面溢油回收装置通常包括吸油船、船载吸油装置和浮动