
一种翻越障碍移动轮及翻越障碍移动装置.pdf

青团****青吖


1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种翻越障碍移动轮及翻越障碍移动装置.pdf
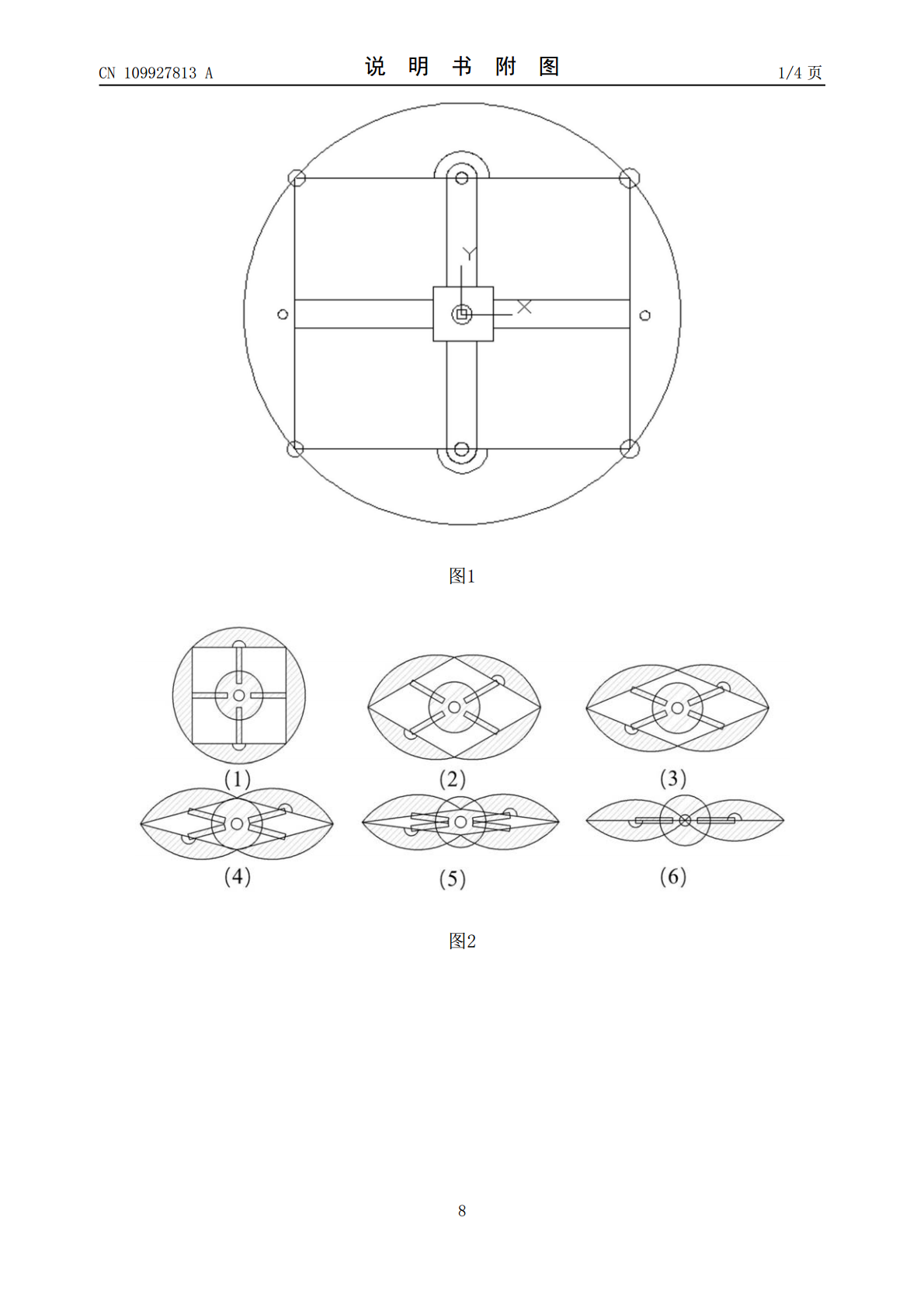
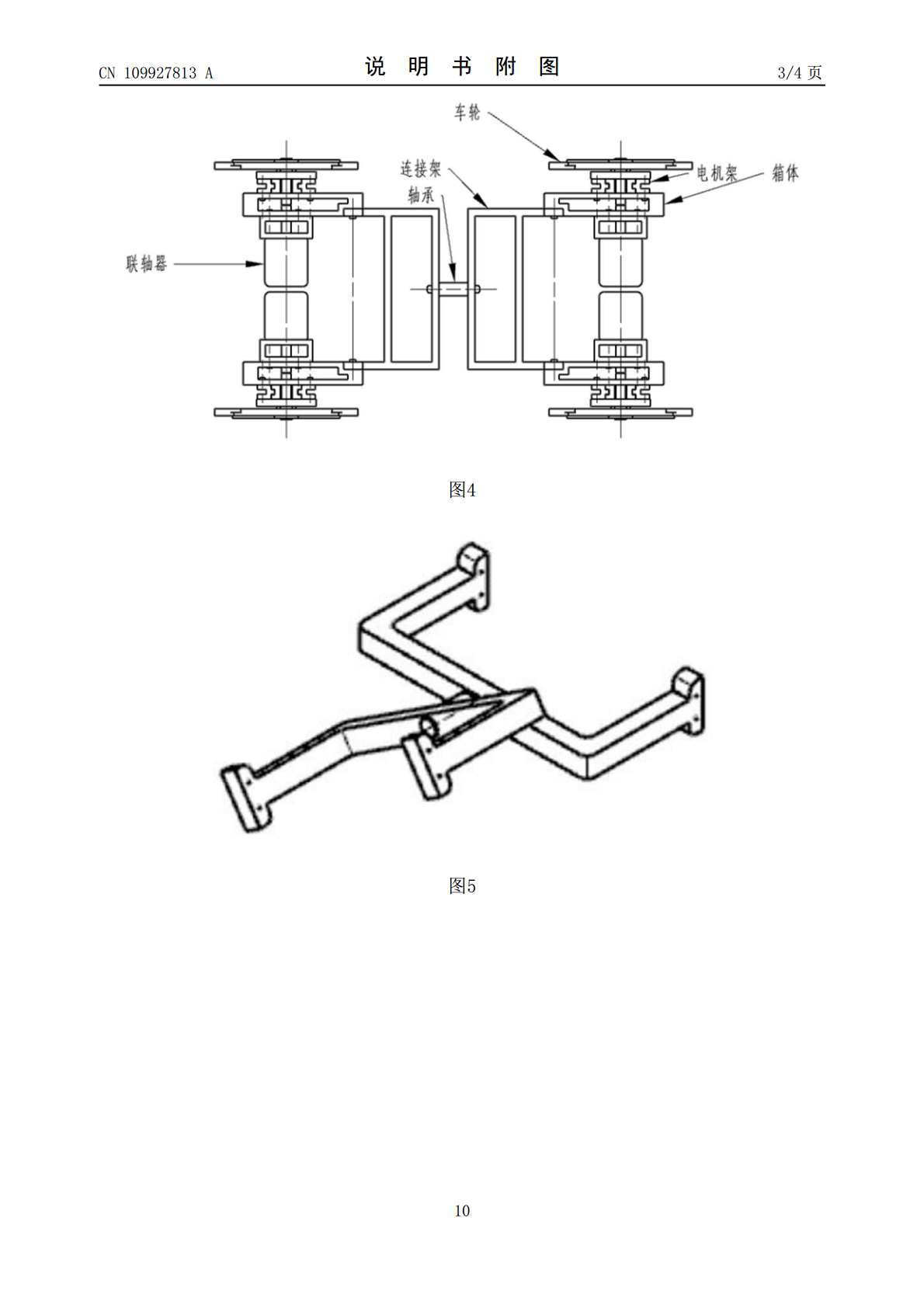
本发明公开了一种翻越障碍移动轮及翻越障碍移动装置,属于工程机械技术领域。翻越障碍移动轮由四个扇形依次连接而成,其中,四个扇形的中心由两根交叉的弓形连杆连接,两根交叉的弓形连杆的交叉角度可变,所述翻越障碍移动轮的变形通过改变两根交叉的弓形连杆的交叉角度实现;通过改变两根交叉的弓形连杆的交叉角度使得车轮完成由圆到椭圆的变形,并利用蜗轮蜗杆电机的自锁,使得车轮在运动过程中保持一定的形状,实现越障功能;所述翻越障碍移动装置包括上述翻越障碍移动轮,通过前后两部分的对称设计,且通过压片轴承连接可实现车体轴向扭转的功能

翻越障碍作文.docx
翻越障碍作文翻越障碍作文(精选6篇)无论是在学校还是在社会中,大家都不可避免地要接触到作文吧,借助作文人们可以反映客观事物、表达思想感情、传递知识信息。写起作文来就毫无头绪?以下是小编帮大家整理的翻越障碍作文,欢迎大家借鉴与参考,希望对大家有所帮助。翻越障碍作文篇1一缕阳光照在身上,唉,今天真热哪!一转眼,今天已经是军训的第二天了,我早早地起了床,开始训练。到了上午,我们有一项活动是翻越障碍,我激动极了。首先,我们要过第一关,那就是过壕沟。那位老师对我们说:首先要大拇指张开,成一个虎口,两只手用力一撑,脚

翻越障碍作文.docx
翻越障碍作文翻越障碍作文在学习、工作或生活中,许多人都有过写作文的经历,对作文都不陌生吧,借助作文人们可以实现文化交流的目的。相信许多人会觉得作文很难写吧,以下是小编整理的翻越障碍作文,供大家参考借鉴,希望可以帮助到有需要的朋友。翻越障碍作文1今天,我们要训练的项目是翻越障碍。有翻越高墙、钻铁丝网、过独木桥……这些游戏我都没玩过,所以非常兴奋。其实游戏规则很简单,老师和教官也会在两旁保护。所以不必害怕,大胆的走过去或者跳过去就好了。第一个项目是跳“木墙”,我很轻松就完成了。第二个项目是钻“铁丝网”,钻铁丝

翻越障碍作文.docx
翻越障碍作文翻越障碍作文在日常学习、工作抑或是生活中,大家都经常接触到作文吧,作文根据体裁的不同可以分为记叙文、说明文、应用文、议论文。相信很多朋友都对写作文感到非常苦恼吧,下面是小编收集整理的翻越障碍作文,欢迎大家借鉴与参考,希望对大家有所帮助。翻越障碍作文1今天少年军校为我们安排了许多丰富多彩的活动,如:翻越障碍物、队列训练、战地救护、知识讲座……但令我印象最深刻的`还是翻越障碍物。教官把我们领到各种各样的障碍物面前后,就站在一旁观看。最刺激的一关是翻越壕沟,它是长方形的,四周竖着墙中间堆满了沙子,看

翻越障碍作文.docx
翻越障碍作文翻越障碍作文在学习、工作或生活中,许多人都有过写作文的经历,对作文都不陌生吧,借助作文人们可以实现文化交流的目的。相信许多人会觉得作文很难写吧,以下是小编整理的翻越障碍作文,供大家参考借鉴,希望可以帮助到有需要的朋友。翻越障碍作文1今天,我们要训练的`项目是翻越障碍。有翻越高墙、钻铁丝网、过独木桥……这些游戏我都没玩过,所以非常兴奋。其实游戏规则很简单,老师和教官也会在两旁保护。所以不必害怕,大胆的走过去或者跳过去就好了。第一个项目是跳“木墙”,我很轻松就完成了。第二个项目是钻“铁丝网”,钻铁