
一种自适应杆径爬杆机器人.pdf

书生****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种自适应杆径爬杆机器人.pdf
本发明涉及一种自适应杆径爬杆机器人。包括侧向开口的第一、第二架体,两架体中的一个在其行走轮机构的两侧与另一个的两侧分别连接,使两架体上的行走轮机构相对布置,且在两行走轮机构之间形成容纳空间,两架体的至少一侧处设有提供给两架体朝向相互靠近方向的作用力的弹性件。通过弹性件将两个框架拉紧,使两框架上的行走轮机构相互靠近并抱紧杆体,在爬杆过程中,随着杆径的变化,弹簧自动伸缩,实现对待爬杆体杆径的自动适应,不仅能适应杆径的规律性变化,也能适应杆径的非规律性改变,而且适应过程无需人员干预,无需人员手动控制调整,爬杆过
一种具有爬杆功能的物理机器人及爬杆方法.pdf
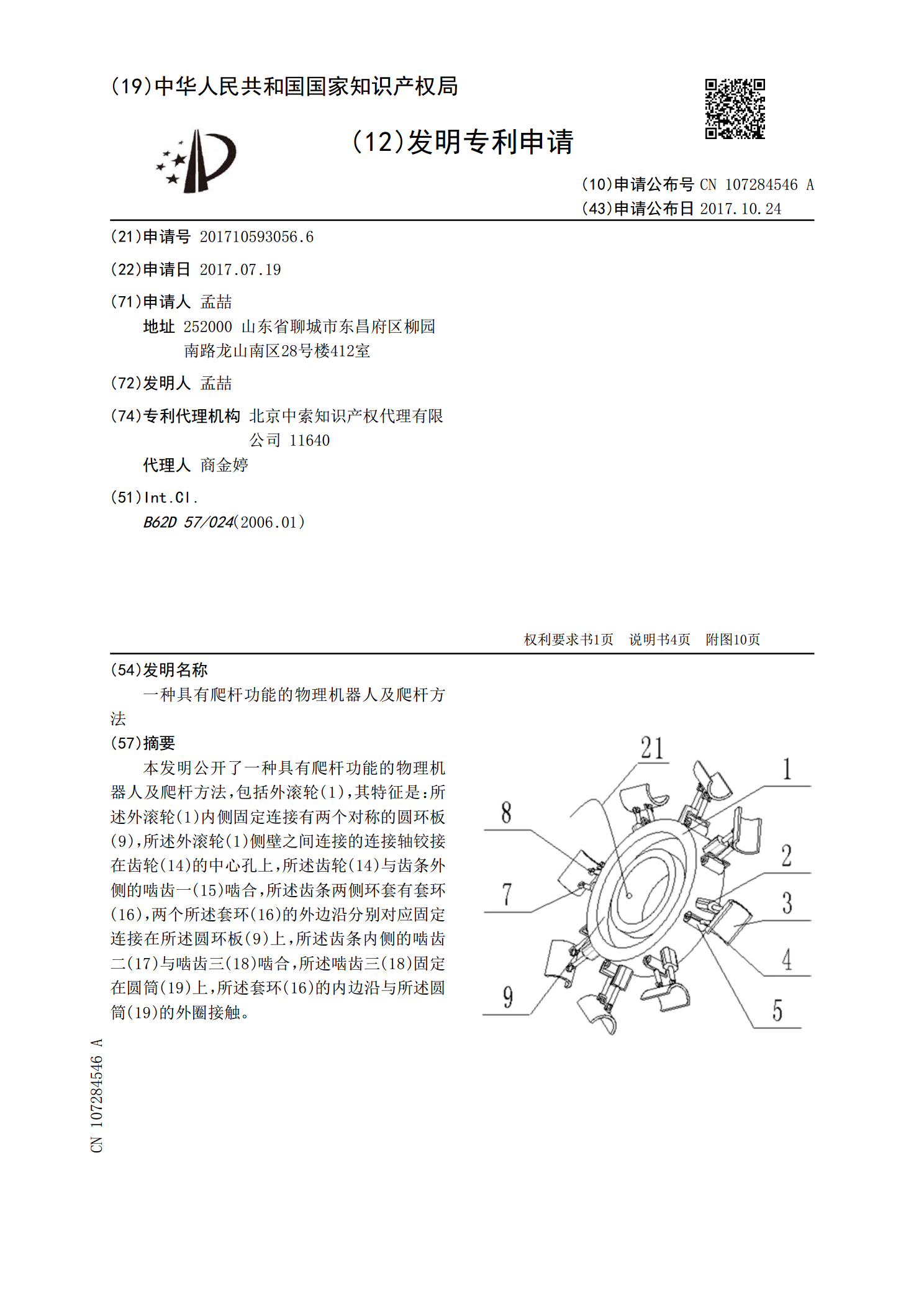
本发明公开了一种具有爬杆功能的物理机器人及爬杆方法,包括外滚轮(1),其特征是:所述外滚轮(1)内侧固定连接有两个对称的圆环板(9),所述外滚轮(1)侧壁之间连接的连接轴铰接在齿轮(14)的中心孔上,所述齿轮(14)与齿条外侧的啮齿一(15)啮合,所述齿条两侧环套有套环(16),两个所述套环(16)的外边沿分别对应固定连接在所述圆环板(9)上,所述齿条内侧的啮齿二(17)与啮齿三(18)啮合,所述啮齿三(18)固定在圆筒(19)上,所述套环(16)的内边沿与所述圆筒(19)的外圈接触。

一种轻型便携式自适应爬杆机器人.pdf
本发明公开了一种轻型便携式自适应爬杆机器人,包括运动平台、驱动装置和传动机构,驱动装置的输出轴经减速器减速后通过一联轴器将动力传递到动力输入轴;传动机构包括四套结构相同的爬行轮传动结构,每套爬行轮传动结构包括传动轴、摆臂和旋转轴和摩擦轮;传动轴与运动平台之间为相对转动连接;摆臂的一端与传动轴转动连接,旋转轴的一端与摆臂的另一端转动连接,摩擦轮固定在旋转轴上;四套爬行轮传动结构中的传动轴按照在周向上均布在运动平台的同一圆周上;动力输入轴将动力分为两支,分别带动位于杆体两侧的两个摩擦轮,另外两个摩擦轮为随动。

一种丝杆推动型爬杆机器人.pdf
本发明公开了一种丝杆推动型爬杆机器人,包括移动车体、固定在所述移动车体上的爬杆机械臂,所述的移动车体包括车体支架、设置在所述车体支架底部的轮子,所述轮子与驱动电机相连接;所述爬杆机械臂包括:丝杆电机、联轴器、丝杆、丝杆套、滑块、锁紧螺钉、两根连杆、两根抱紧臂、两个电机座、两个爬升电机、两个主动摩擦轮、一个从动摩擦轮、设有滑槽的T形机架。本发明机构简单,操作方便,稳定可靠,适应不同直径、截面形状的管材、棒材,适用于各种不同技术领域的高空爬杆作业,如电力系统架设电缆、高空水管的检查、高空灯管的维修、建筑装修喷

一种爬杆机器人.pdf
本发明涉及一种爬杆机器人。爬杆机器人包括第一、第二架体,第一、第二架体上均设有行走轮机构,两个架体中的一个在其行走轮机构的两侧位置与另一个的行走轮机构的两侧位置分别通过两处连接结构对应连接,使得两个架体上的行走轮机构相对布置,且在两行走轮机构之间形成供带爬杆体穿过的容纳空间,两处连接结构中,有一处为软连接结构,有一处为可拆连接结构,两个架体的行走轮机构的两侧的侧边中的至少一个上设有调节该侧边长度的主动收缩机构。一处为软连接,通过主动收缩机构调节该侧的长度时可依靠软连接结构的设置补偿收缩的变形量,整个调节过