
一种冗-欠驱动结合的机械手装置.pdf

永梅****33


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种冗-欠驱动结合的机械手装置.pdf
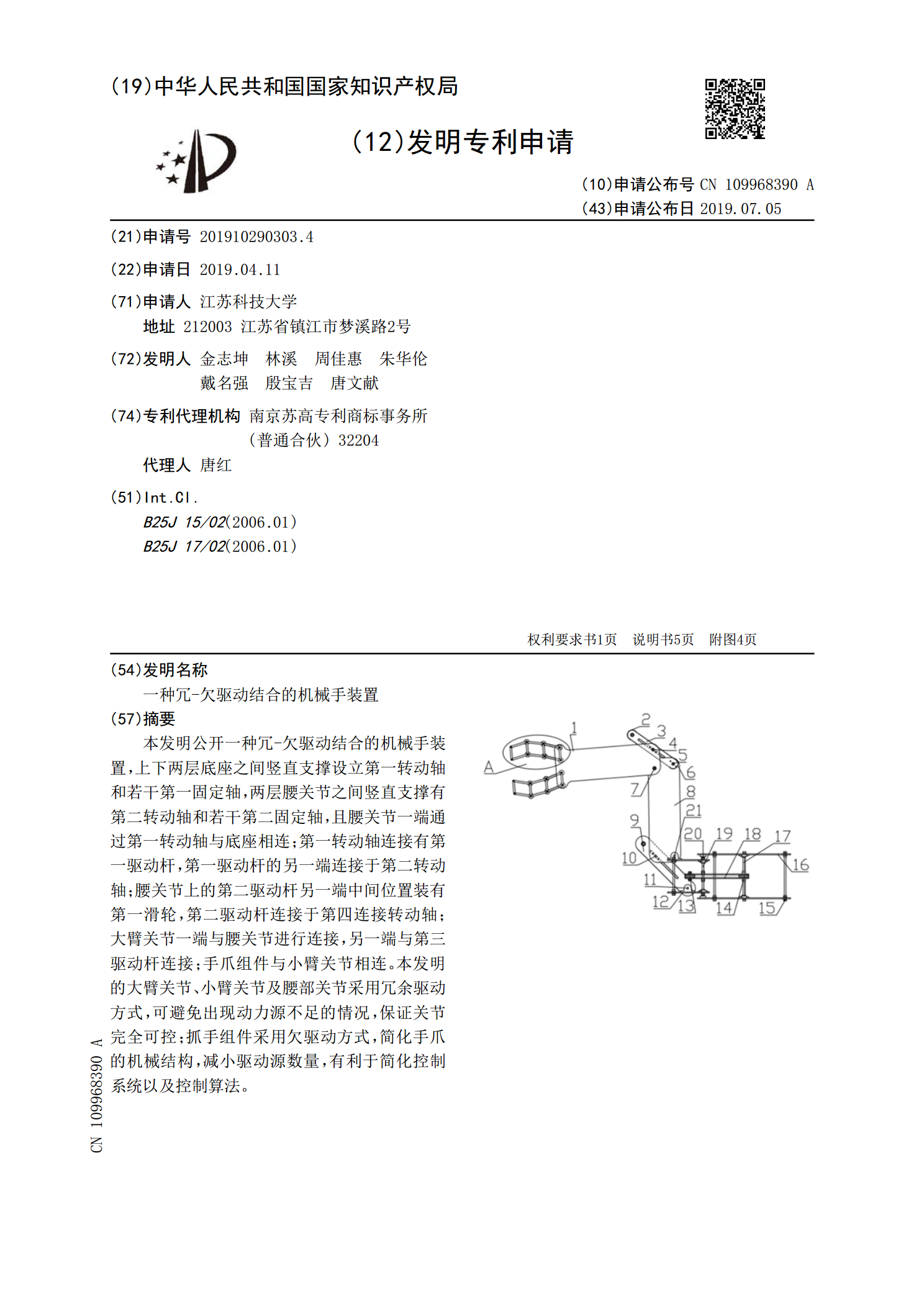
本发明公开一种冗‑欠驱动结合的机械手装置,上下两层底座之间竖直支撑设立第一转动轴和若干第一固定轴,两层腰关节之间竖直支撑有第二转动轴和若干第二固定轴,且腰关节一端通过第一转动轴与底座相连;第一转动轴连接有第一驱动杆,第一驱动杆的另一端连接于第二转动轴;腰关节上的第二驱动杆另一端中间位置装有第一滑轮,第二驱动杆连接于第四连接转动轴;大臂关节一端与腰关节进行连接,另一端与第三驱动杆连接;手爪组件与小臂关节相连。本发明的大臂关节、小臂关节及腰部关节采用冗余驱动方式,可避免出现动力源不足的情况,保证关节完全可控;

欠驱动采摘机械手末端执行器装置.pdf
本发明公开了一种欠驱动采摘机械手末端执行器装置。包括结构相同的三个手指,传动机构,三块接触板,三根连杆,驱动杆和转动盘;每个手指具有三个关节,手指第一关节的一端均匀安装在转动盘上,每个手指都装有接触板。具体工作原理是:驱动杆在电机的驱动下移动,通过连杆带动3个手指相向运动闭拢,当手指上的接触板接触到果蔬时,果蔬会推动接触板滑动,驱动手指第二关节内部不完全齿轮运动,与之啮合的齿轮带动手指第三关节运动,接触板表面的力传感器测试到预定的抓取力时,将信号反馈给电机,控制驱动杆停止移动,电机再驱动转动盘转动,实现果
一种欠驱动苹果采摘末端机械手.pdf
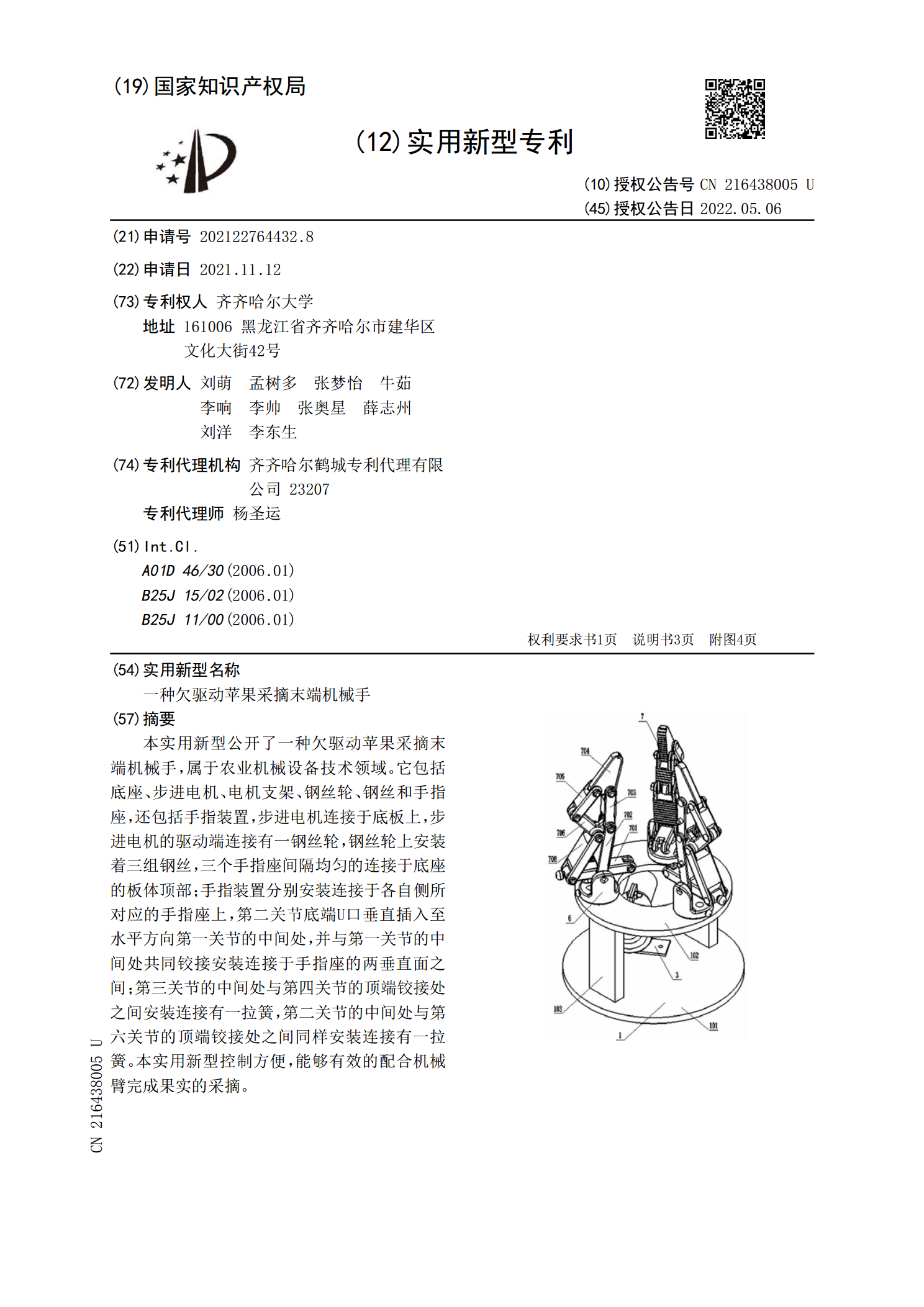
本实用新型公开了一种欠驱动苹果采摘末端机械手,属于农业机械设备技术领域。它包括底座、步进电机、电机支架、钢丝轮、钢丝和手指座,还包括手指装置,步进电机连接于底板上,步进电机的驱动端连接有一钢丝轮,钢丝轮上安装着三组钢丝,三个手指座间隔均匀的连接于底座的板体顶部;手指装置分别安装连接于各自侧所对应的手指座上,第二关节底端U口垂直插入至水平方向第一关节的中间处,并与第一关节的中间处共同铰接安装连接于手指座的两垂直面之间;第三关节的中间处与第四关节的顶端铰接处之间安装连接有一拉簧,第二关节的中间处与第六关节的顶

能防止形位退化的欠驱动机械手指装置.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN101134316A(43)申请公布日2008.03.05(21)申请号CN200710071186.X(22)申请日2007.09.18(71)申请人浙江理工大学地址310018浙江省杭州市江干区经济技术开发区白杨街道2号大街5号(72)发明人胡挺李秦川武传宇胡旭东蒋焕煜应义斌(74)专利代理机构杭州求是专利事务所有限公司代理人林怀禹(51)Int.CIB25J15/00B25J19/00权利要求说明书说明书幅图(54)发明

一种欠驱动柔性机械手的抓取力研究.docx
一种欠驱动柔性机械手的抓取力研究标题:欠驱动柔性机械手的抓取力研究摘要:柔性机械手作为一种新型的机械手臂具有较好的柔性和适应性,在许多工业和服务领域应用广泛。然而,由于其欠驱动特性,柔性机械手的抓取力研究成为一个具有挑战性的问题。本文介绍了柔性机械手抓取力研究的相关工作,并提出了一种改善抓取力的方法。通过使用感知反馈机制和控制算法,可以提高柔性机械手的抓取力,并实现精确和稳定的抓取操作。关键词:柔性机械手、欠驱动、抓取力、感知反馈、控制算法1.引言柔性机械手是一种具有高度柔性和适应性的机械臂,广泛应用于工