
一种基于动态规划的飞行冲突解脱方法.pdf

努力****承悦

1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10
9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于动态规划的飞行冲突解脱方法.pdf
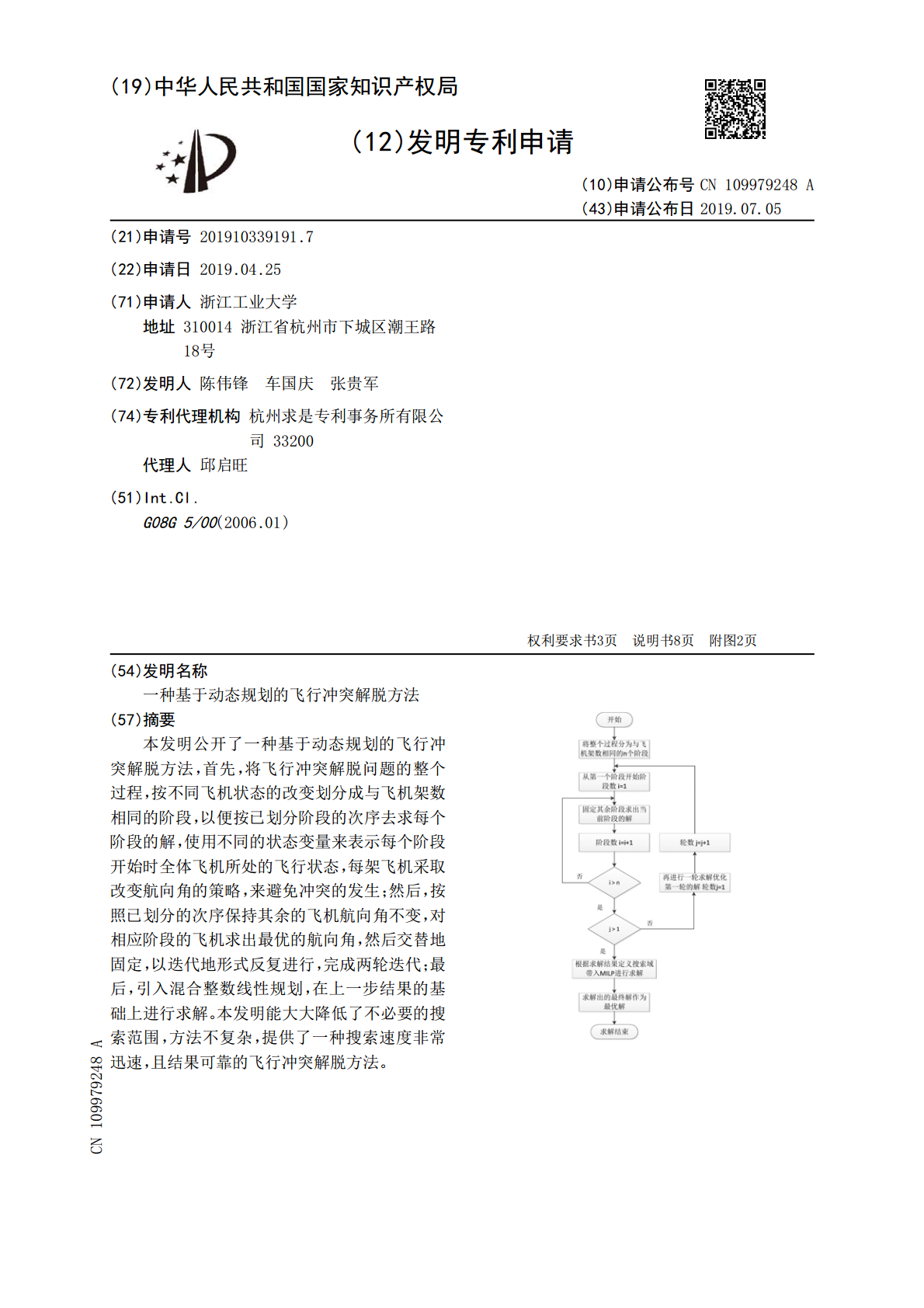
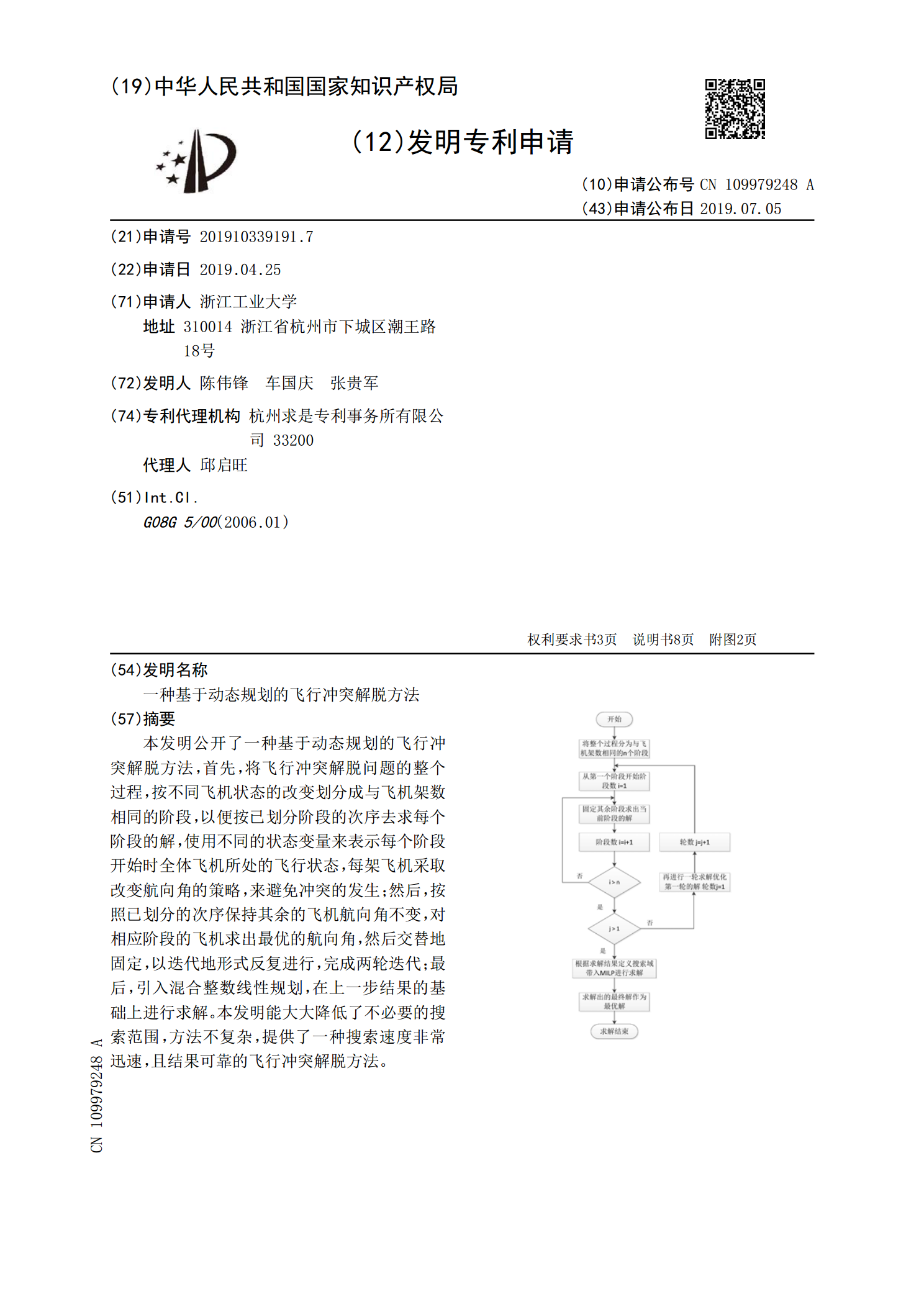
本发明公开了一种基于动态规划的飞行冲突解脱方法,首先,将飞行冲突解脱问题的整个过程,按不同飞机状态的改变划分成与飞机架数相同的阶段,以便按已划分阶段的次序去求每个阶段的解,使用不同的状态变量来表示每个阶段开始时全体飞机所处的飞行状态,每架飞机采取改变航向角的策略,来避免冲突的发生;然后,按照已划分的次序保持其余的飞机航向角不变,对相应阶段的飞机求出最优的航向角,然后交替地固定,以迭代地形式反复进行,完成两轮迭代;最后,引入混合整数线性规划,在上一步结果的基础上进行求解。本发明能大大降低了不必要的搜索范围,
飞行冲突解脱方法研究综述.pptx
汇报人:CONTENTS添加章节标题飞行冲突解脱方法概述飞行冲突解脱的定义飞行冲突解脱的重要性飞行冲突解脱方法的分类飞行冲突解脱方法研究历程早期研究阶段现代研究阶段未来研究方向飞行冲突解脱方法的应用场景空中交通管制无人机集群协同控制航天器编队飞行飞行冲突解脱方法的关键技术传感器技术决策与规划技术控制技术通信技术飞行冲突解脱方法的性能评估与优化性能评估标准性能优化方法性能提升策略未来研究方向结论与展望研究结论研究不足与展望汇报人:

基于动态调速的定航线飞行冲突探测与解脱算法研究的开题报告.docx
基于动态调速的定航线飞行冲突探测与解脱算法研究的开题报告一、研究背景在现代航空运输中,航空交通的密度越来越高,航班数量和航线密度的增加也使得飞行冲突问题日益突出。飞行冲突指的是两架或更多飞机在同一时间、同一高度、同一区域内发生的可能相撞的情况。飞行冲突对飞行安全造成极大的威胁,据统计,全球每年有近百起飞行冲突事件发生。因此,如何快速准确地探测飞行冲突并做出及时决策,成为了航空交通管理的重要课题。目前,国内外已有很多关于飞行冲突探测与解脱的研究,其中基于动态调速的算法成为了一个热门的研究方向。动态调速是指通

飞行冲突探测与解脱方法研究综述.pptx
汇报人:CONTENTS添加章节标题飞行冲突探测技术概述飞行冲突探测技术的意义飞行冲突探测技术的发展历程飞行冲突探测技术的主要方法飞行冲突探测技术的研究现状与趋势飞行解脱方法研究综述飞行解脱技术的意义飞行解脱技术的发展历程飞行解脱技术的主要方法飞行解脱技术的研究现状与趋势飞行冲突探测与解脱技术的挑战与展望飞行冲突探测与解脱技术面临的挑战飞行冲突探测与解脱技术的发展趋势未来研究重点和方向技术应用前景和价值结论对飞行冲突探测与解脱技术研究的总结对未来研究的建议和展望汇报人:

基于粒子群算法的飞行冲突解脱问题.docx
基于粒子群算法的飞行冲突解脱问题基于粒子群算法的飞行冲突解脱问题摘要:飞行冲突是飞行安全领域中的一个重要问题,解决飞行冲突问题对于保障空中交通的安全至关重要。粒子群算法是一种基于模拟自然界群体行为的优化算法,可以有效地应用于飞行冲突解脱问题。本文基于粒子群算法,针对飞行冲突解脱问题进行研究,并通过实例分析和对比实验,验证了粒子群算法在解决飞行冲突问题上的有效性。1.引言随着航空业的快速发展,空中交通量不断增加,飞行冲突问题日益突出。飞行冲突不仅对飞行安全构成威胁,还会导致航班延误和空中交通管制的困难。因此