
基于多视点图像的结构物表观全景图矫正拼接方法.pdf

涵蓄****09

1/10
2/10
3/10
4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于多视点图像的结构物表观全景图矫正拼接方法.pdf
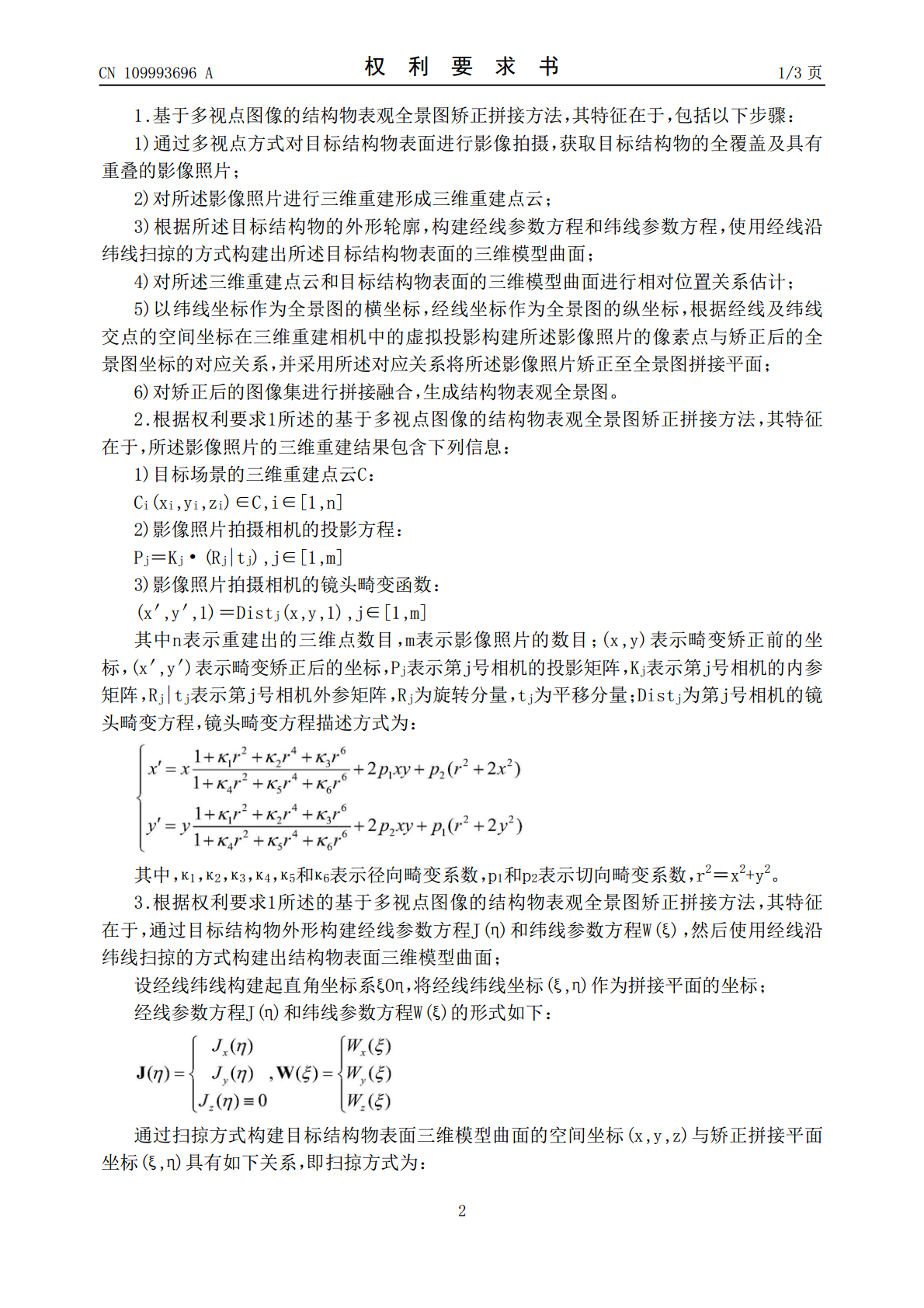
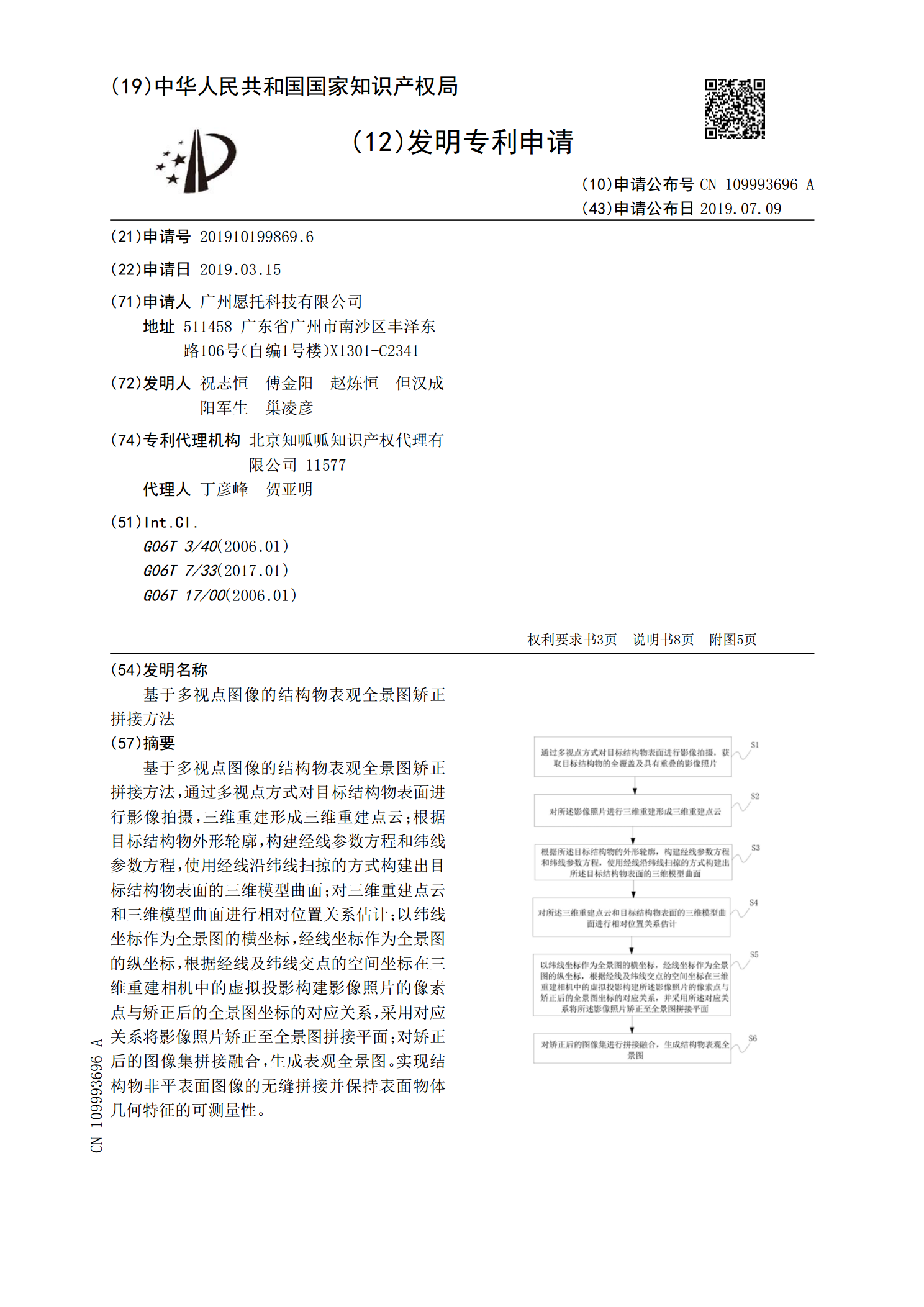
基于多视点图像的结构物表观全景图矫正拼接方法,通过多视点方式对目标结构物表面进行影像拍摄,三维重建形成三维重建点云;根据目标结构物外形轮廓,构建经线参数方程和纬线参数方程,使用经线沿纬线扫掠的方式构建出目标结构物表面的三维模型曲面;对三维重建点云和三维模型曲面进行相对位置关系估计;以纬线坐标作为全景图的横坐标,经线坐标作为全景图的纵坐标,根据经线及纬线交点的空间坐标在三维重建相机中的虚拟投影构建影像照片的像素点与矫正后的全景图坐标的对应关系,采用对应关系将影像照片矫正至全景图拼接平面;对矫正后的图像集拼接

基于多视点获取图像的拼接算法研究.docx
基于多视点获取图像的拼接算法研究基于多视点获取图像的拼接算法研究摘要:随着摄影技术的不断进步和多视点成像技术的发展,在各种领域中,多视点获取图像的拼接技术显得异常重要。多视点获取图像的拼接算法在计算机视觉领域具有广阔的应用前景。本文围绕多视点获取图像的拼接算法开展研究,主要从多视点图像拼接的概念、算法流程以及应用等方面进行探讨,并对现有算法进行评价和总结。关键词:多视点图像、拼接算法、多视点成像、图像拼接1.引言多视点获取图像的拼接算法是计算机视觉领域中的一个重要研究方向,它对于实时多视点成像系统和虚拟现

基于多频段融合的全景图像拼接技术.docx
基于多频段融合的全景图像拼接技术基于多频段融合的全景图像拼接技术摘要:全景图像拼接是将多幅重叠的图像进行融合,生成一幅宽广视角的全景图像。传统的全景图像拼接技术主要基于图像的几何变换,容易出现几何失真和颜色不一致等问题。为了解决这些问题,本文提出了一种基于多频段融合的全景图像拼接技术。该方法首先对输入的图像进行频域分析,然后将不同频段的图像进行拼接,最后通过频域融合完成全景图像拼接。实验结果表明,该方法能够显著提高全景图像的质量和稳定性。关键词:全景图像拼接,频域分析,多频段融合,几何失真,颜色不一致1.

基于多视点获取图像的拼接算法研究的中期报告.docx
基于多视点获取图像的拼接算法研究的中期报告中期报告一、研究目的本论文的研究目的是基于多视点获取图像的拼接算法研究。通过研究多视点图像拼接算法,实现相邻视角图像的拼接,从而在图像拼接方面提高图像质量和准确度,为系统的自主感知,增加更多的视角,实现更为精准的识别和感知。二、研究现状随着计算机视觉和数字图像处理的发展,图像拼接技术已经广泛应用于计算机辅助设计、三维重构、地理信息系统等领域。传统的图像拼接方法主要利用基础矩阵(FundamentalMatrix)或本质矩阵(EssentialMatrix)来实现图

基于多视点获取图像的拼接算法研究的开题报告.docx
基于多视点获取图像的拼接算法研究的开题报告一、选题背景及意义多视点获取图像的拼接技术在近年来受到了广泛的关注和研究,其在实际生产和应用场景中具有非常广阔的应用前景和商业价值。例如,在无人机,军事侦察,自动驾驶等领域中,多个视角拍摄的图像需要进行拼接以获得更加全面和准确的信息;在虚拟现实和游戏等领域中,多幅图像拼接能够构建更加逼真和细致的场景和环境。因此,本文基于多视点获取图像的拼接算法研究具有重要的应用价值和理论意义。二、研究目标和内容本文将针对多视点获取场景进行图像的拼接技术进行研究,在保证图像质量的前