
一种渐开线蜗轮滚齿加工齿面三维建模方法.pdf

鸿朗****ka

1/10

2/10
3/10

4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种渐开线蜗轮滚齿加工齿面三维建模方法.pdf
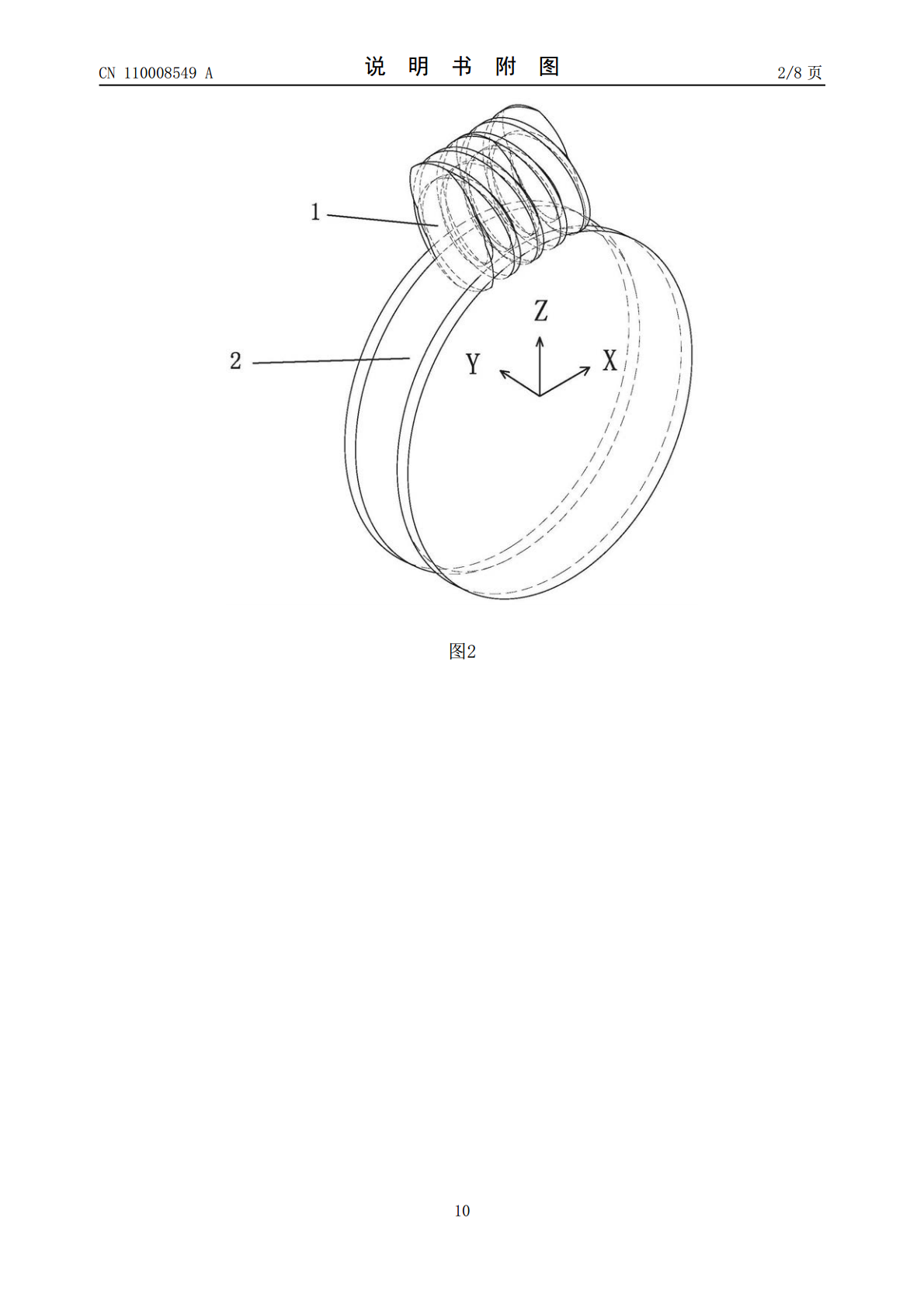
本发明公开一种渐开线蜗轮滚齿加工齿面三维建模方法,根据渐开线蜗轮设计参数,渐开线滚刀设计参数,加工工艺参数,模拟滚齿运动,采用UG软件先建立渐开线蜗轮加工三维模型,然后建立五齿槽渐开线蜗轮三维模型,最后通过“布尔运算”→“变换”命令建立全齿渐开线蜗轮三维模型。本发明直观反映滚齿加工渐开线蜗轮齿廓表面形貌,同时获得表面粗糙度Ra1(μm)值,直观性好,效率高和精度高。
一种蜗轮滚齿加工齿面三维建模方法、装置及设备.pdf
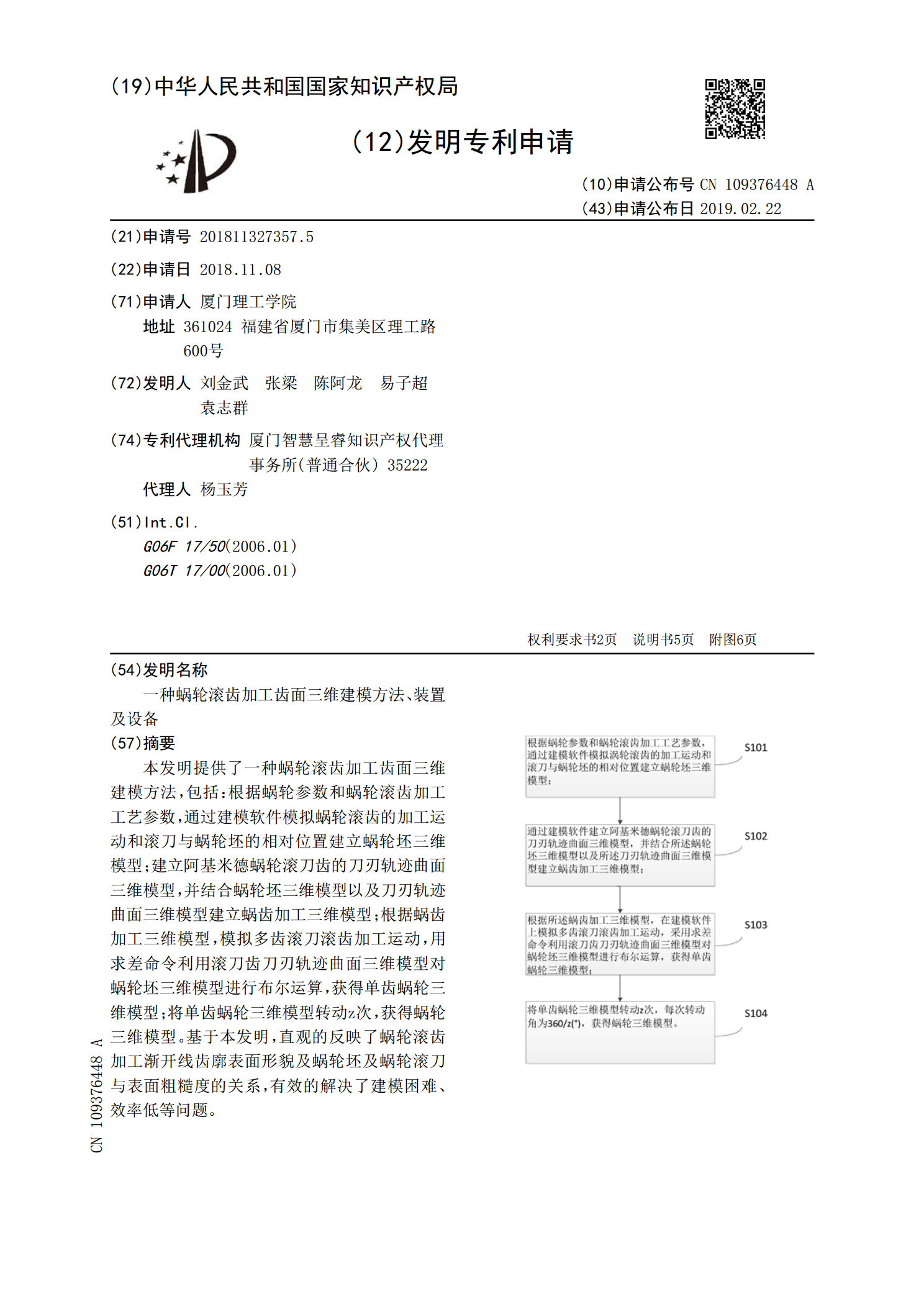
本发明提供了一种蜗轮滚齿加工齿面三维建模方法,包括:根据蜗轮参数和蜗轮滚齿加工工艺参数,通过建模软件模拟蜗轮滚齿的加工运动和滚刀与蜗轮坯的相对位置建立蜗轮坯三维模型;建立阿基米德蜗轮滚刀齿的刀刃轨迹曲面三维模型,并结合蜗轮坯三维模型以及刀刃轨迹曲面三维模型建立蜗齿加工三维模型;根据蜗齿加工三维模型,模拟多齿滚刀滚齿加工运动,用求差命令利用滚刀齿刀刃轨迹曲面三维模型对蜗轮坯三维模型进行布尔运算,获得单齿蜗轮三维模型;将单齿蜗轮三维模型转动z次,获得蜗轮三维模型。基于本发明,直观的反映了蜗轮滚齿加工渐开线齿廓
滚齿加工齿面三维建模方法.pdf
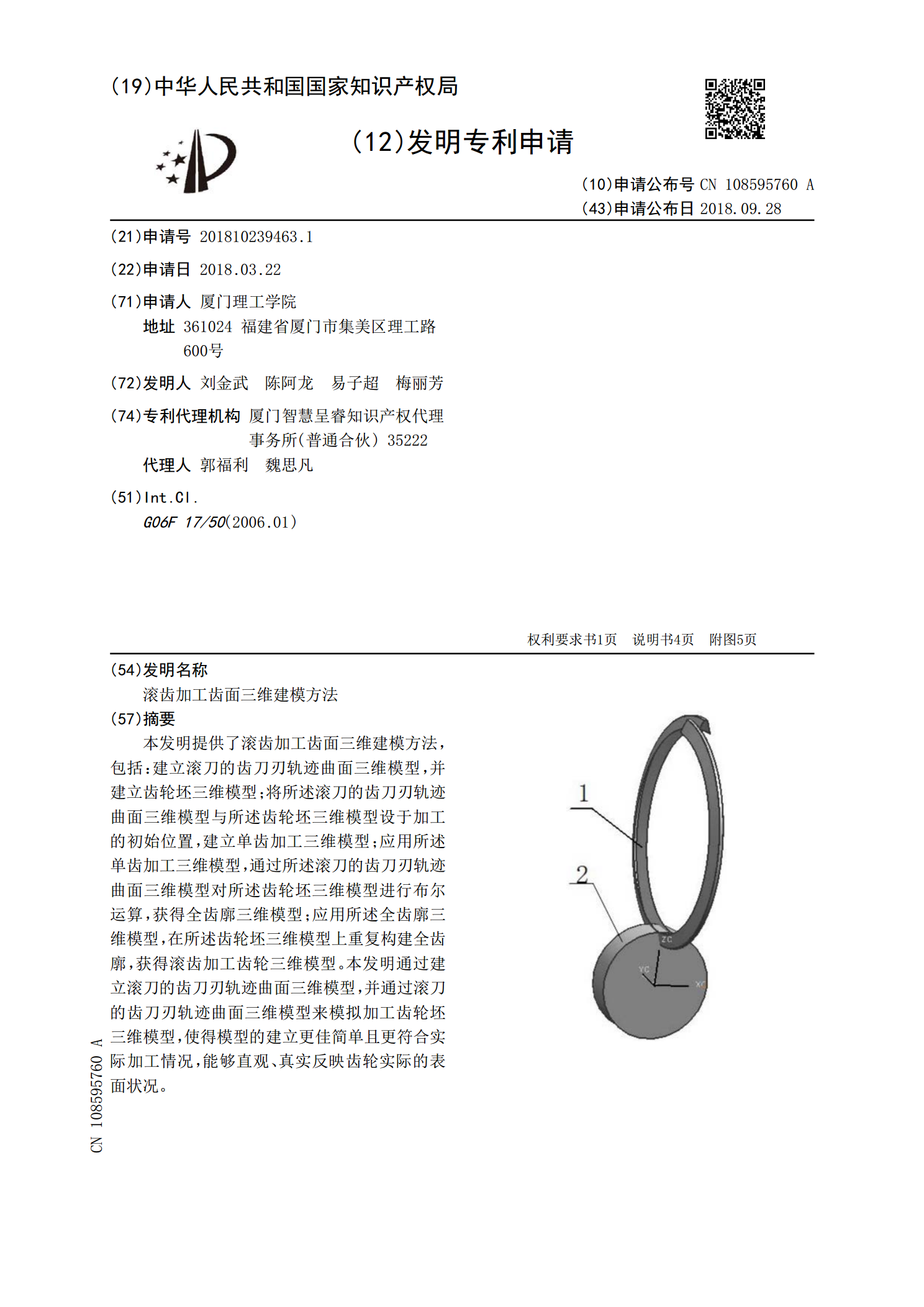
本发明提供了滚齿加工齿面三维建模方法,包括:建立滚刀的齿刀刃轨迹曲面三维模型,并建立齿轮坯三维模型;将所述滚刀的齿刀刃轨迹曲面三维模型与所述齿轮坯三维模型设于加工的初始位置,建立单齿加工三维模型;应用所述单齿加工三维模型,通过所述滚刀的齿刀刃轨迹曲面三维模型对所述齿轮坯三维模型进行布尔运算,获得全齿廓三维模型;应用所述全齿廓三维模型,在所述齿轮坯三维模型上重复构建全齿廓,获得滚齿加工齿轮三维模型。本发明通过建立滚刀的齿刀刃轨迹曲面三维模型,并通过滚刀的齿刀刃轨迹曲面三维模型来模拟加工齿轮坯三维模型,使得模
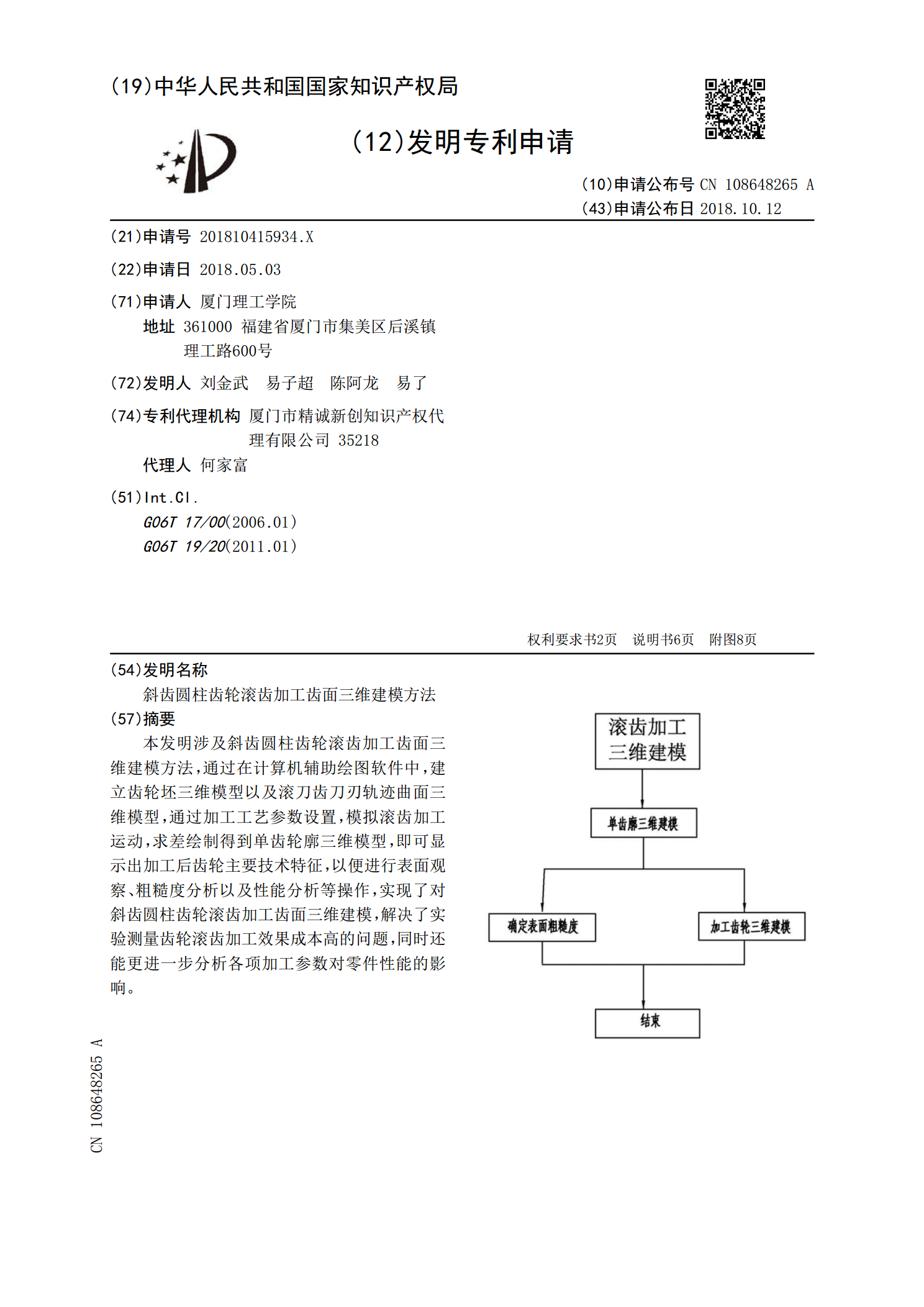
斜齿圆柱齿轮滚齿加工齿面三维建模方法.pdf
本发明涉及斜齿圆柱齿轮滚齿加工齿面三维建模方法,通过在计算机辅助绘图软件中,建立齿轮坯三维模型以及滚刀齿刀刃轨迹曲面三维模型,通过加工工艺参数设置,模拟滚齿加工运动,求差绘制得到单齿轮廓三维模型,即可显示出加工后齿轮主要技术特征,以便进行表面观察、粗糙度分析以及性能分析等操作,实现了对斜齿圆柱齿轮滚齿加工齿面三维建模,解决了实验测量齿轮滚齿加工效果成本高的问题,同时还能更进一步分析各项加工参数对零件性能的影响。
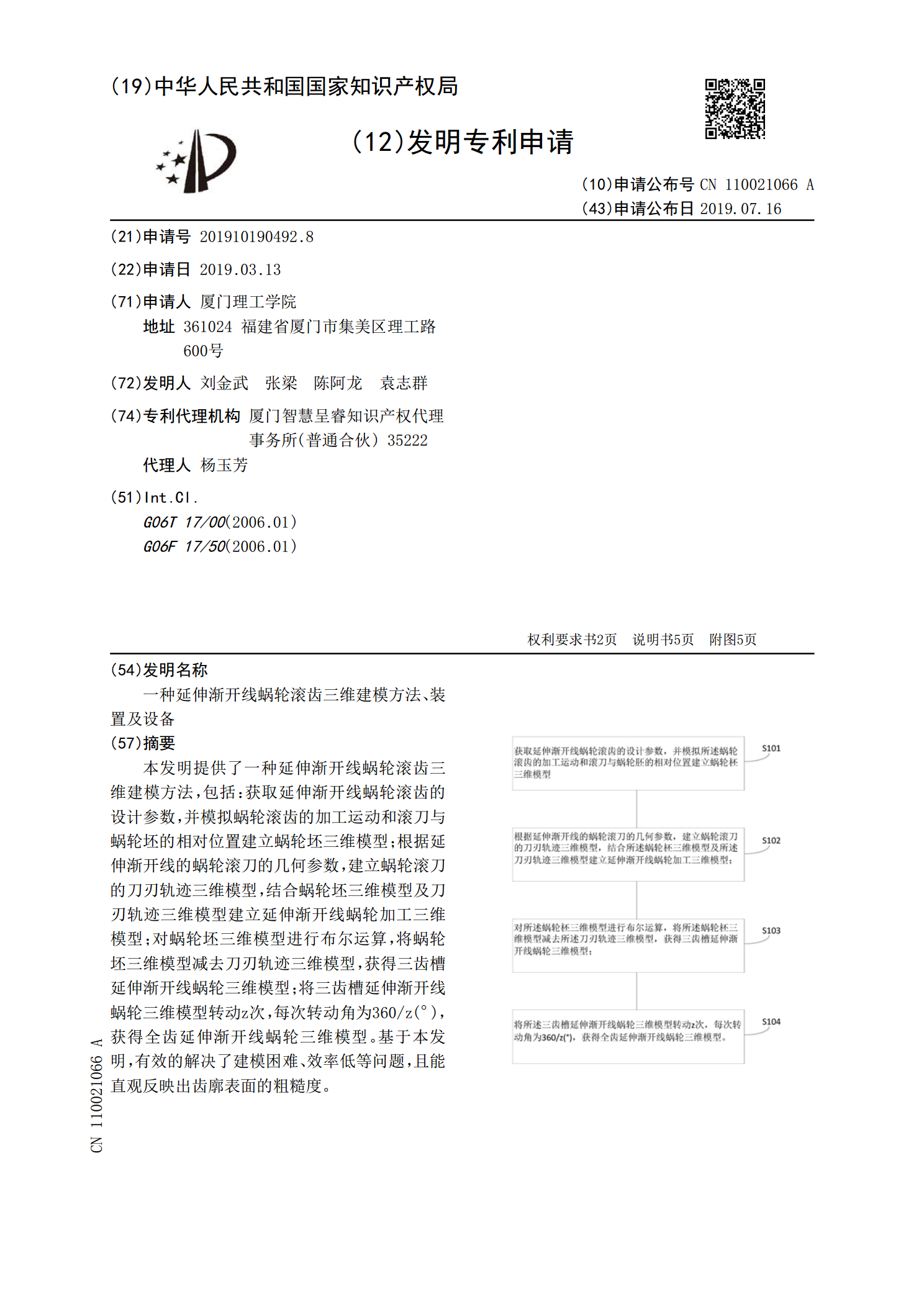
一种延伸渐开线蜗轮滚齿三维建模方法、装置及设备.pdf
本发明提供了一种延伸渐开线蜗轮滚齿三维建模方法,包括:获取延伸渐开线蜗轮滚齿的设计参数,并模拟蜗轮滚齿的加工运动和滚刀与蜗轮坯的相对位置建立蜗轮坯三维模型;根据延伸渐开线的蜗轮滚刀的几何参数,建立蜗轮滚刀的刀刃轨迹三维模型,结合蜗轮坯三维模型及刀刃轨迹三维模型建立延伸渐开线蜗轮加工三维模型;对蜗轮坯三维模型进行布尔运算,将蜗轮坯三维模型减去刀刃轨迹三维模型,获得三齿槽延伸渐开线蜗轮三维模型;将三齿槽延伸渐开线蜗轮三维模型转动z次,每次转动角为360/z(°),获得全齿延伸渐开线蜗轮三维模型。基于本发明,有