
一种基于摄像的轮胎轮廓测量方法.pdf

是向****23

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于摄像的轮胎轮廓测量方法.pdf
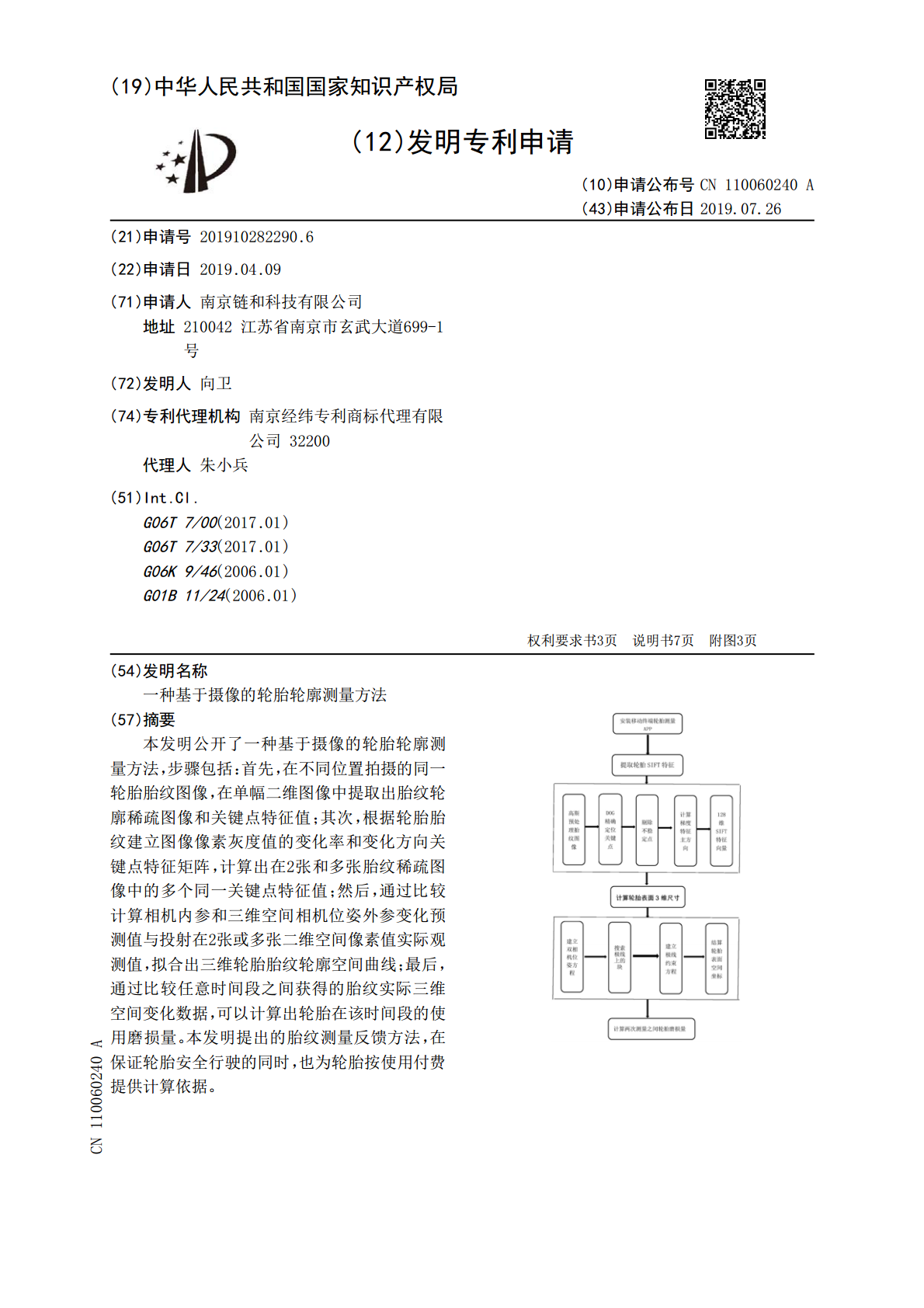
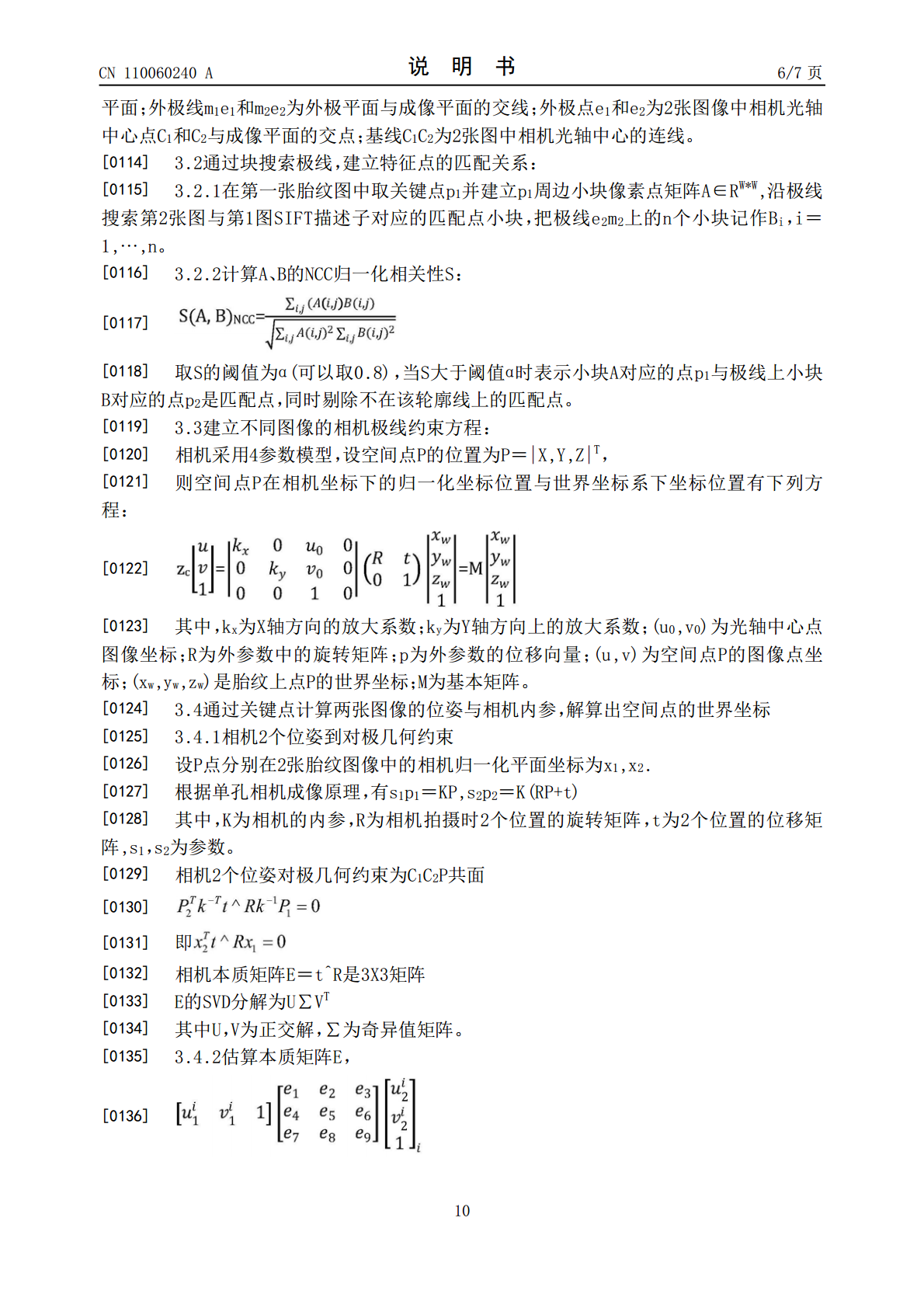
本发明公开了一种基于摄像的轮胎轮廓测量方法,步骤包括:首先,在不同位置拍摄的同一轮胎胎纹图像,在单幅二维图像中提取出胎纹轮廓稀疏图像和关键点特征值;其次,根据轮胎胎纹建立图像像素灰度值的变化率和变化方向关键点特征矩阵,计算出在2张和多张胎纹稀疏图像中的多个同一关键点特征值;然后,通过比较计算相机内参和三维空间相机位姿外参变化预测值与投射在2张或多张二维空间像素值实际观测值,拟合出三维轮胎胎纹轮廓空间曲线;最后,通过比较任意时间段之间获得的胎纹实际三维空间变化数据,可以计算出轮胎在该时间段的使用磨损量。本发
一种轮胎内轮廓测量方法.pdf
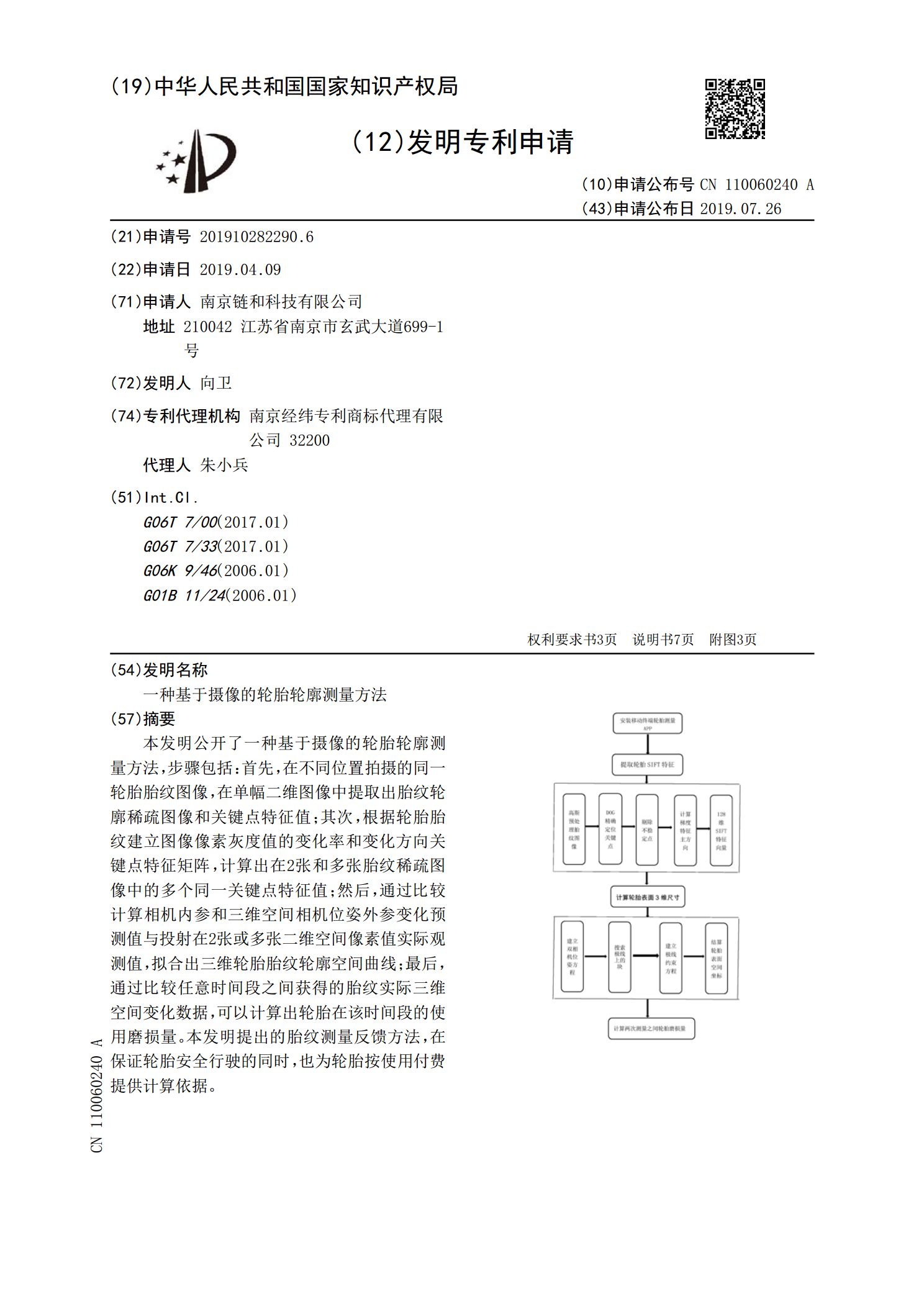
本发明属于轮胎贴胶技术领域,具体涉及一种轮胎内轮廓测量方法。本发明包括以下步骤:1)、扒开轮胎并敞露出轮胎的待测量内壁;2)、测距头沿轮胎轴向伸入轮胎内圈区域,开始测量与轮胎内壁其中一点之间的间距;3)、测距头产生沿轮胎轴向的位移动作,且每位移指定距离,测量一次,并记录数值;4)、将数值纪录下来后,绘成轮胎内轮廓曲线。本发明能实现对轮胎内壁轮廓曲线的精确测量功能,从而为后续的贴胶机的贴胶动作提供了点对点的高精度数据支持,可有效确保自封胶的自贴合完整性和均匀性,自封胶轮胎的使用可靠性及安全性可得到显著提升。
一种基于残余应力的变形轮廓测量方法.pdf
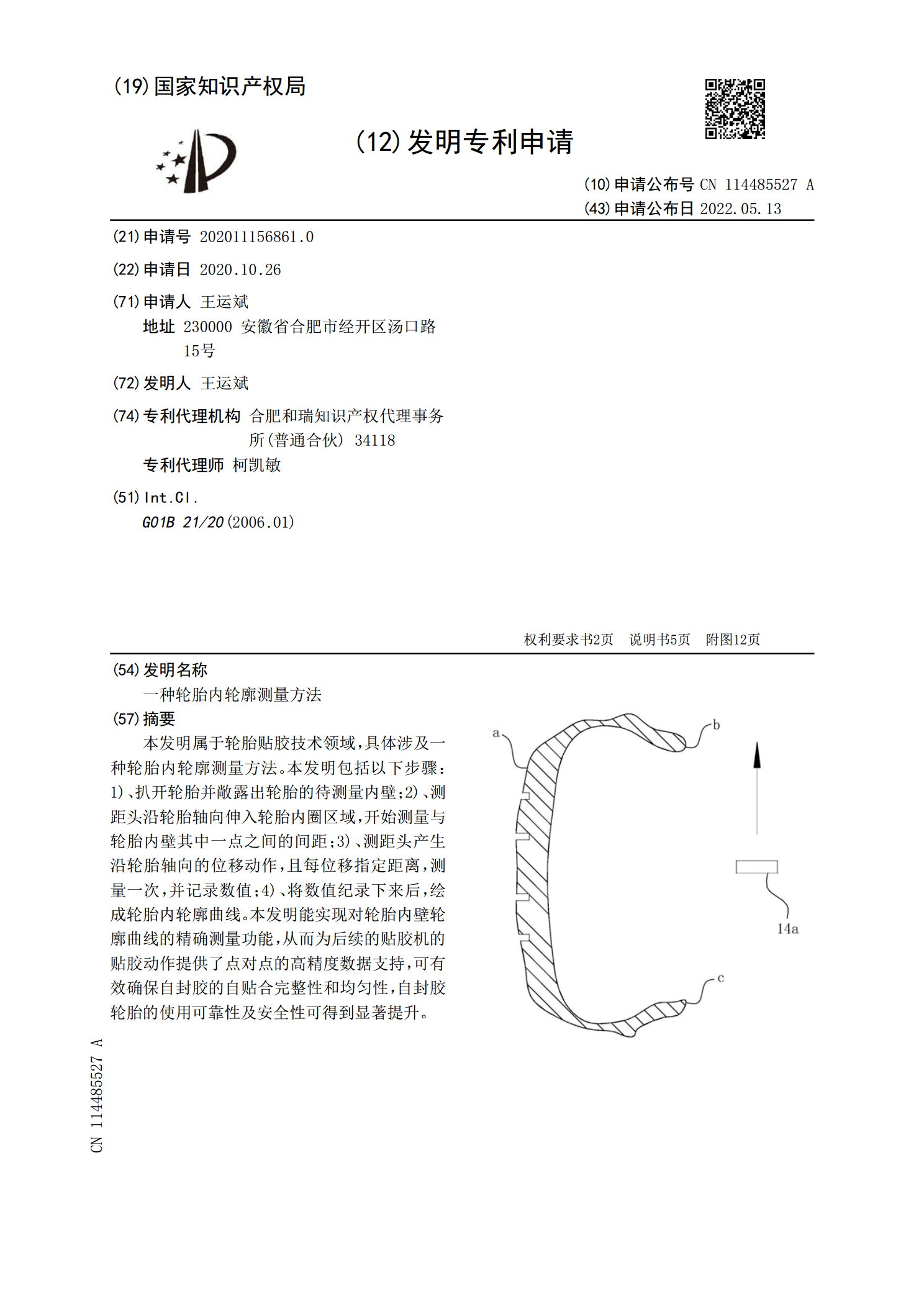
本发明实施例公开了一种基于残余应力的变形轮廓测量方法,包括:采用切割机将待测试件以预设方式切开得到切割面;采用三坐标测量机测量残余应力释放后的切割面的变形轮廓;其中,所述采用三坐标测量机测量残余应力释放后的切割面的变形轮廓,包括:在切割面上建立多个工件坐标系;分别根据多个工件坐标系测量切割面同一预设位置基于不同工件坐标系的坐标值;根据不同坐标系的测量数据得到待测试件基于残余应力的变形轮廓。本发明实施例的技术方案,通过将测量数据平移和旋转的方法,得到的轮廓数据不会因为切割和测量的倾斜误差而变化,从而可以用于

一种基于轮廓匹配的螺栓直径测量方法.pdf
本发明公开了一种基于轮廓匹配的螺栓直径测量方法,该方法根据螺栓位置、可见光相机和深度相机标定信息、相机相对于螺栓的旋转角,模拟一个符合图纸尺寸的螺栓位于目标螺栓位置时,在可见光相机图像上映射出的模拟轮廓。将模拟轮廓上的点根据直线和弧线部分划分多个区域,根据模拟轮廓和目标轮廓上像素点的距离信息,计算两个轮廓的匹配度。在图像像素平面x轴、y轴、轮廓平面旋转角、图纸螺栓直径四个维度上进行循环遍历,计算匹配度,匹配度最高的模拟轮廓对应的图纸螺栓直径即为螺栓直径测量结果。该方法具有测量误差小、效率高、无需严格静态放

轮胎胎体外轮廓尺寸快速测量方法.pdf
本发明公开了一种轮胎胎体外轮廓尺寸快速测量方法,其方案步骤为①、在轮胎胎体的正上方设置一盏激光标线灯,激光标线灯向下打出一条与成型机主轴轴线同向的激光线;②、在轮胎胎体上方设置至少一台CCD相机,该CCD相机能够拍摄到轮胎胎体最顶部的外轮廓;③、对CCD相机成像区域实施尺寸标定;④、打开激光标线灯使激光线照射在轮胎胎体顶部,启动CCD相机对轮胎胎体顶部进行拍照而得到数码图片;⑤、对数码图片实施图像处理而得到了一条形状与轮胎胎体外轮廓一致的圆弧曲线;⑥、计算出圆弧曲线与成型机主轴轴线的相对位置,得到轮胎胎体