
一种图像识别方法及装置.pdf

一条****然后


1/10
2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种图像识别方法及装置.pdf
本发明实施例提供了一种图像识别方法及装置,涉及数据处理技术领域,具体实现方案为:检测待识别图像中包含目标对象的目标图像区域;若检测到目标图像区域,对检测到的各目标图像区域进行对象分类,得到各目标图像区域中对象的局部对象类型;对所述待识别图像进行对象分类,得到所述待识别图像中对象的全图对象类型;根据所得局部对象类型和全图对象类型,确定所述目标对象的对象类型。应用本发明实施例提供的方案进行图像识别,能够准确地识别图像中对象的类型。

一种图像区域识别方法及装置.pdf
本说明书一个或多个实施例提供一种图像区域识别方法及装置,其中方法包括:获取由施工图转换得到的目标图像,所述目标图像包括所述施工图中的施工对象,所述施工对象具有内部连通的对象区域;在所述目标图像中生成锚点;以所述锚点为起点,获取所述目标图像中与所述锚点相连通的各个像素点,并将所述锚点和相连通的各个像素点的占用区域作为所述锚点所在的施工对象对应的对象区域。

一种图像识别方法及装置.pdf
本发明涉及图像处理技术领域,尤其涉及一种图像识别方法及装置,用以解决现有技术中采用轮廓图表征图像的图像识别方式,有可能会丢失图像中除轮廓图外的关键信息,导致识别准确率较低的问题。本发明实施例提供的一种图像识别方法,包括:根据由目标图像确定的特征三角形和由源图像确定的特征三角形,确定三角形匹配度;根据确定的所述三角形匹配度,确定所述目标图像与所述源图像的图像匹配度。采用本发明实施例,可以采用特征三角形来分别表征目标图像与源图像的图像信息,由于特征三角形不仅可以表征轮廓图信息,还可以表征轮廓内外的图像信息,从
一种图像识别方法及装置.pdf
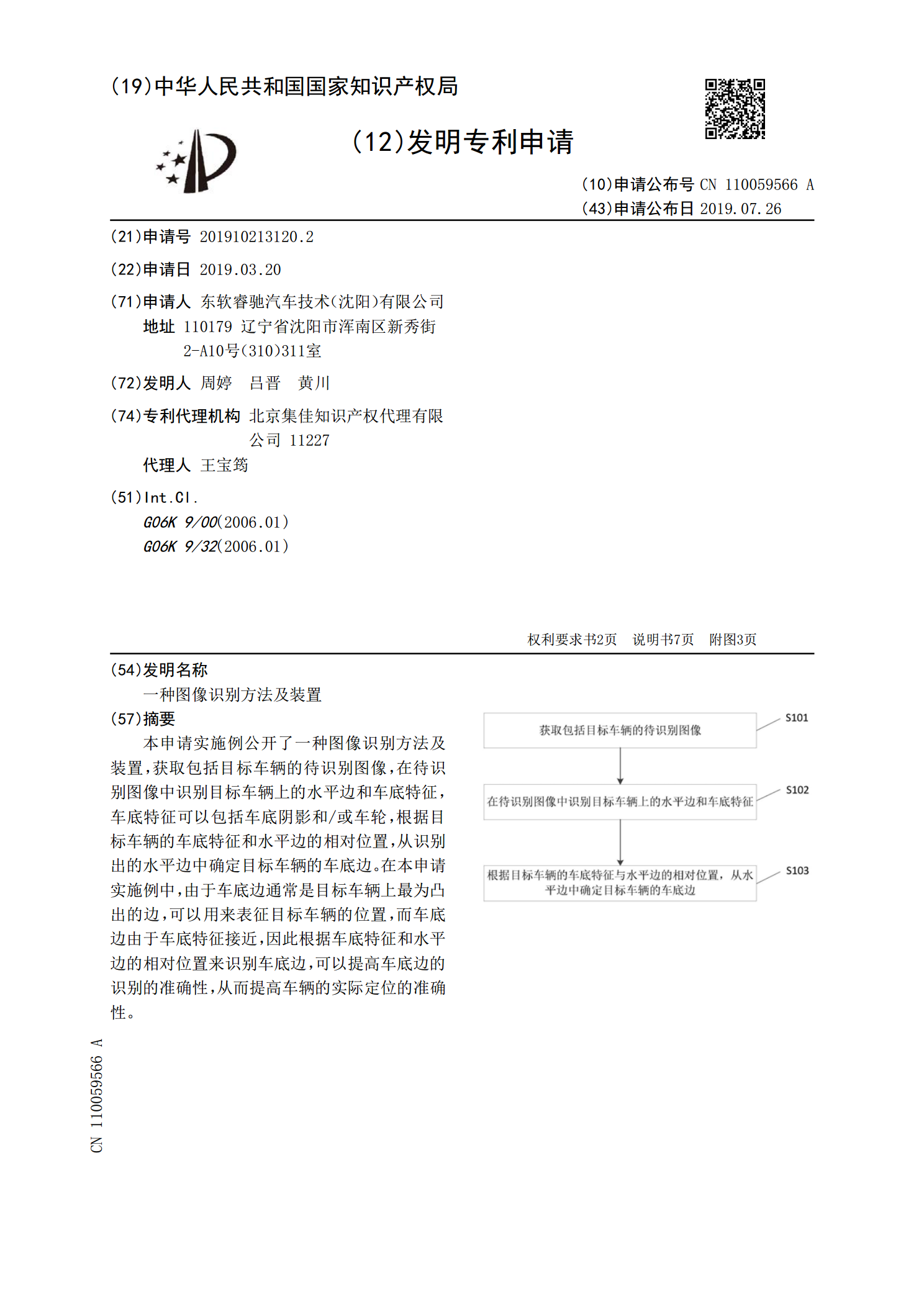
本申请实施例公开了一种图像识别方法及装置,获取包括目标车辆的待识别图像,在待识别图像中识别目标车辆上的水平边和车底特征,车底特征可以包括车底阴影和/或车轮,根据目标车辆的车底特征和水平边的相对位置,从识别出的水平边中确定目标车辆的车底边。在本申请实施例中,由于车底边通常是目标车辆上最为凸出的边,可以用来表征目标车辆的位置,而车底边由于车底特征接近,因此根据车底特征和水平边的相对位置来识别车底边,可以提高车底边的识别的准确性,从而提高车辆的实际定位的准确性。
一种图像识别方法及装置.pdf
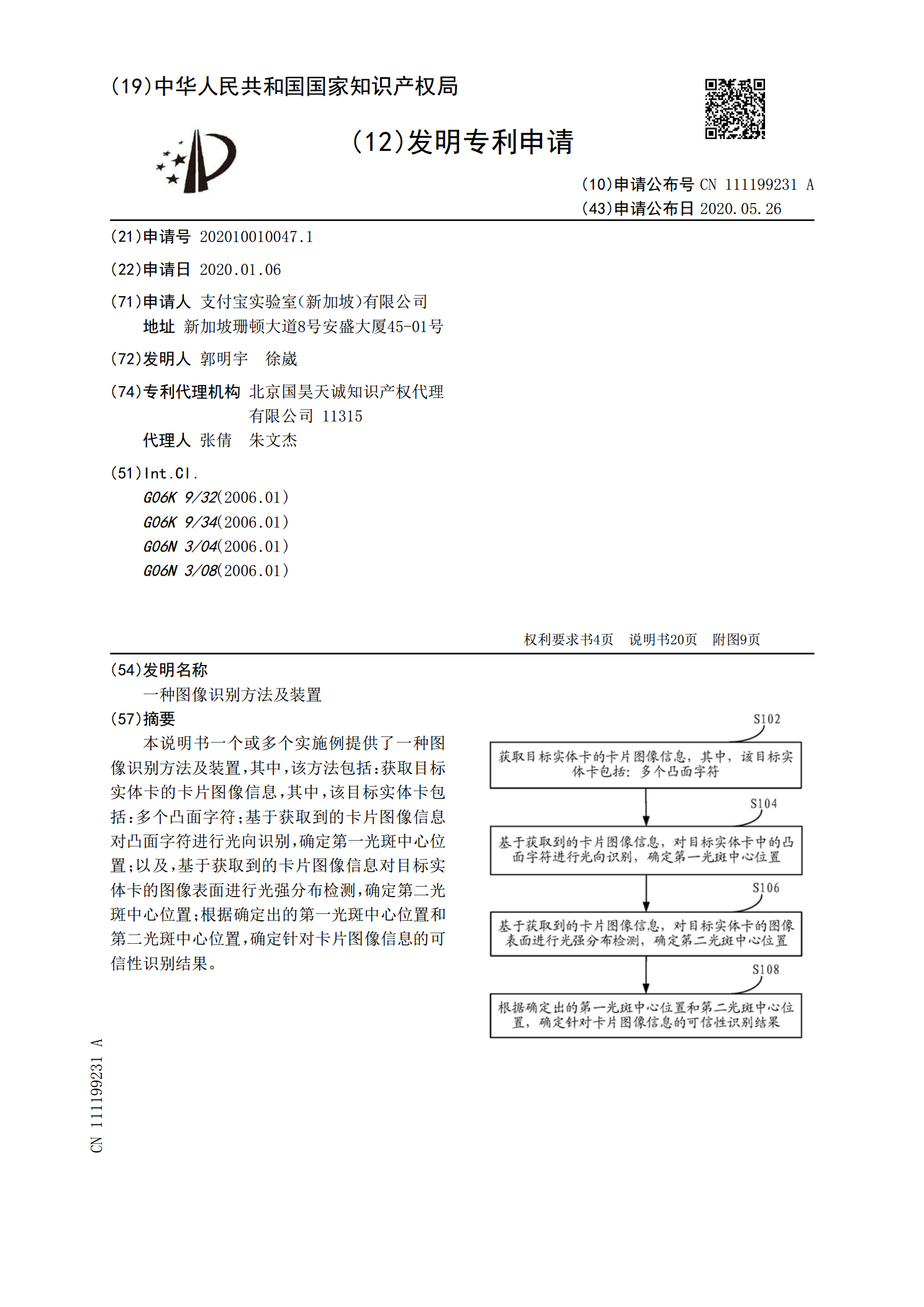
本说明书一个或多个实施例提供了一种图像识别方法及装置,其中,该方法包括:获取目标实体卡的卡片图像信息,其中,该目标实体卡包括:多个凸面字符;基于获取到的卡片图像信息对凸面字符进行光向识别,确定第一光斑中心位置;以及,基于获取到的卡片图像信息对目标实体卡的图像表面进行光强分布检测,确定第二光斑中心位置;根据确定出的第一光斑中心位置和第二光斑中心位置,确定针对卡片图像信息的可信性识别结果。