
一种基于鱼群算法优化BP网络的齿轮箱故障诊断方法.pdf

是你****元呀


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于鱼群算法优化BP网络的齿轮箱故障诊断方法.pdf
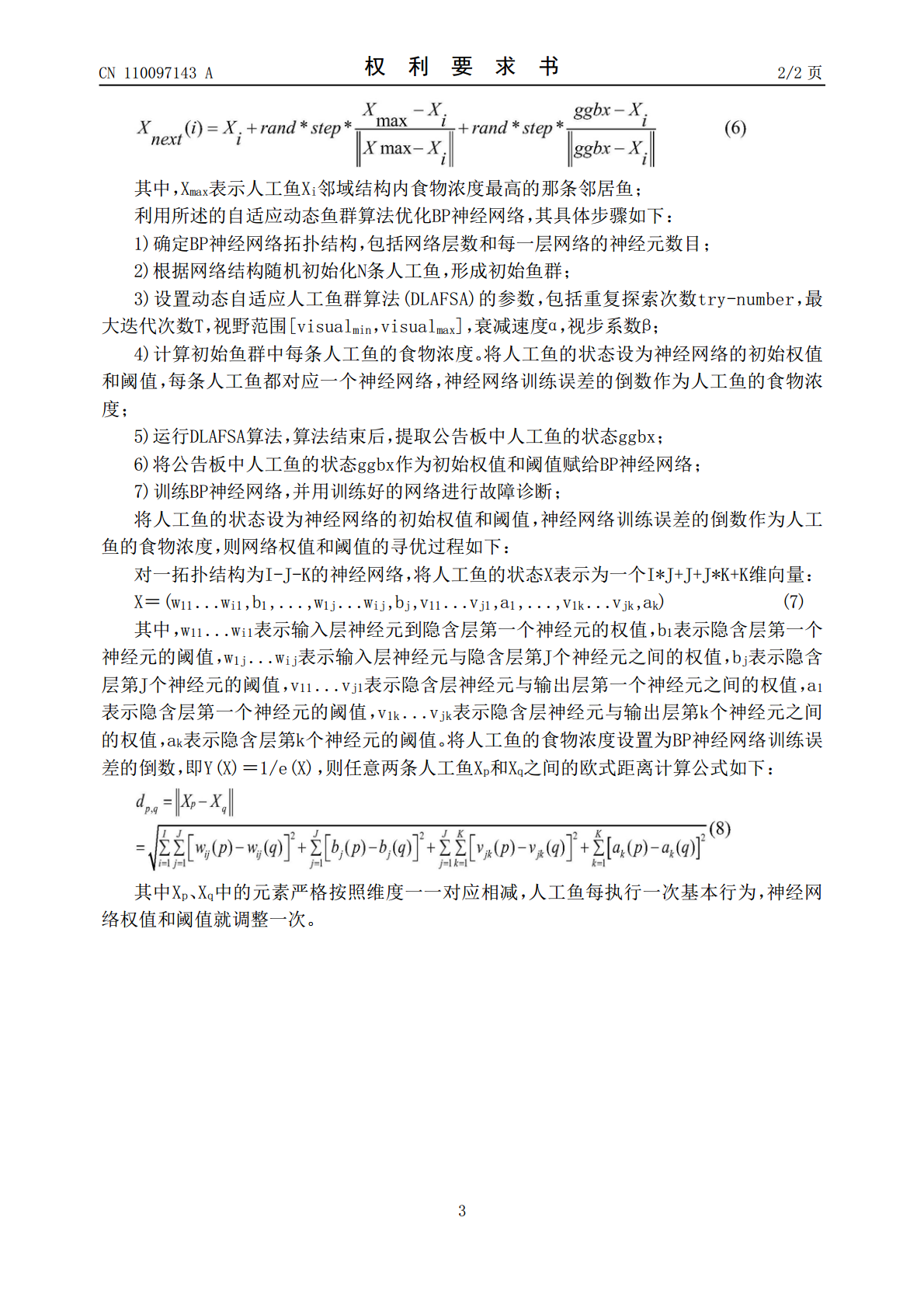
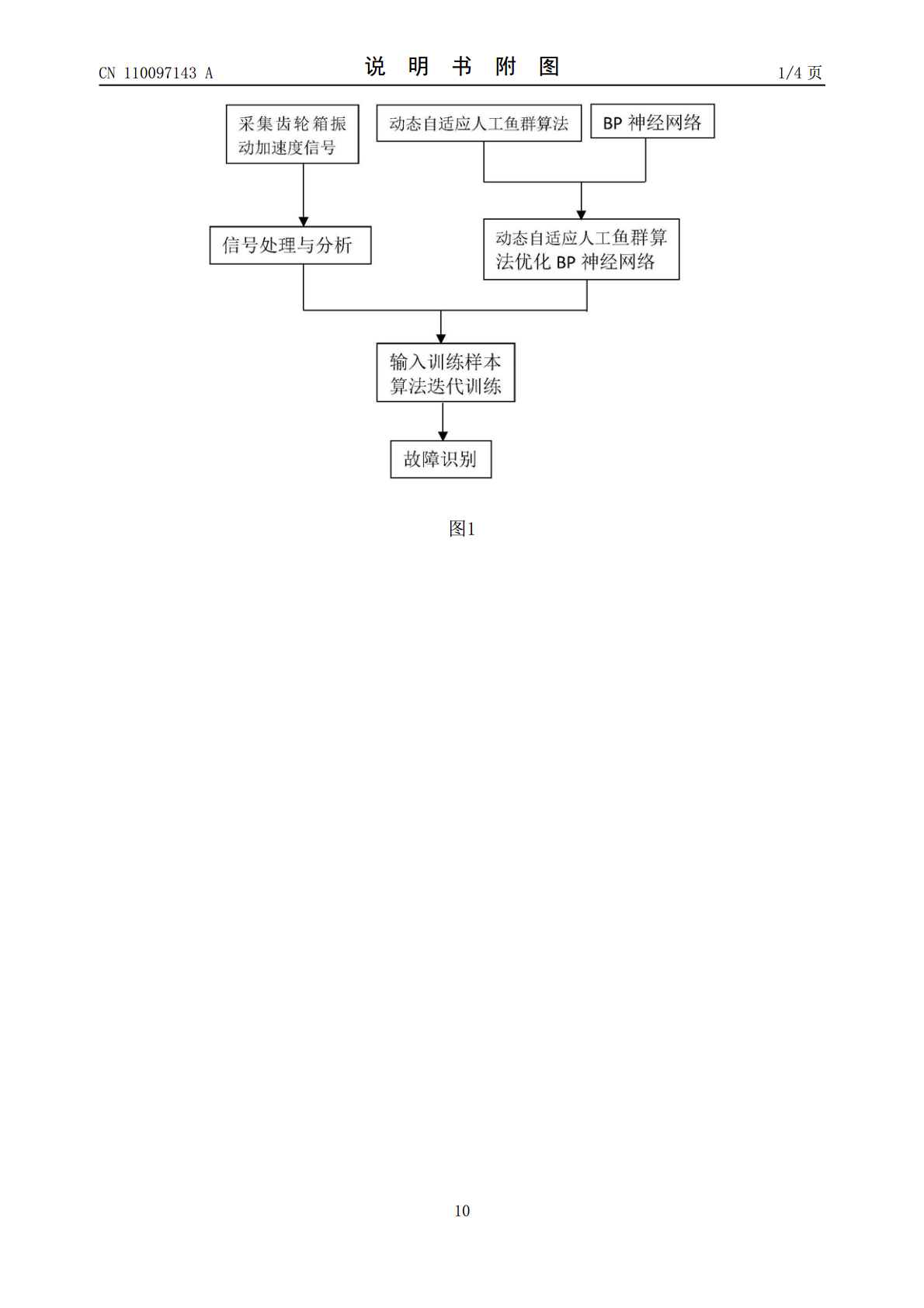
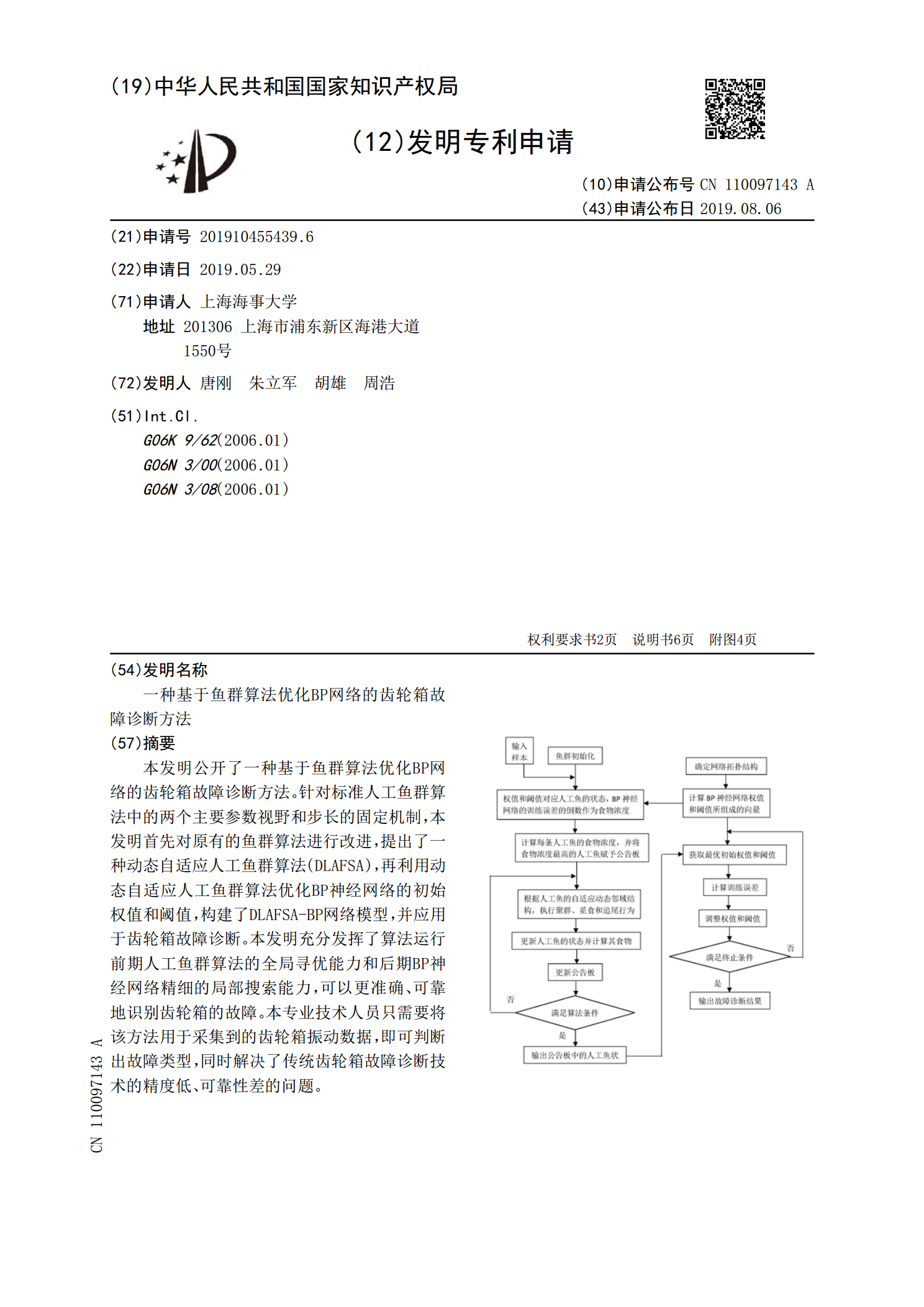
本发明公开了一种基于鱼群算法优化BP网络的齿轮箱故障诊断方法。针对标准人工鱼群算法中的两个主要参数视野和步长的固定机制,本发明首先对原有的鱼群算法进行改进,提出了一种动态自适应人工鱼群算法(DLAFSA),再利用动态自适应人工鱼群算法优化BP神经网络的初始权值和阈值,构建了DLAFSA‑BP网络模型,并应用于齿轮箱故障诊断。本发明充分发挥了算法运行前期人工鱼群算法的全局寻优能力和后期BP神经网络精细的局部搜索能力,可以更准确、可靠地识别齿轮箱的故障。本专业技术人员只需要将该方法用于采集到的齿轮箱振动数据,

基于果蝇算法优化BP神经网络的齿轮箱故障诊断.docx
基于果蝇算法优化BP神经网络的齿轮箱故障诊断基于果蝇算法优化BP神经网络的齿轮箱故障诊断摘要:随着机械工业的发展,齿轮箱在各种设备和机械系统中得到了广泛的应用。然而,由于工作环境的恶劣和长时间的使用,齿轮箱常常出现故障,这对设备的正常运行和安全性产生了严重影响。因此,在齿轮箱故障诊断方面的研究具有重要的实际意义。本文提出了基于果蝇算法优化BP神经网络的方法,以提高齿轮箱故障诊断的准确性和效率。关键词:果蝇算法;BP神经网络;齿轮箱;故障诊断1.引言齿轮箱作为机械系统中重要的传动装置,具有复杂的结构和功能。

基于纵横交叉算法优化BP神经网络的风机齿轮箱故障诊断方法.docx
基于纵横交叉算法优化BP神经网络的风机齿轮箱故障诊断方法摘要风机齿轮箱是风力发电机组的重要组成部分,其故障会直接影响风电机组的工作效率和安全性。因此,针对风机齿轮箱故障的诊断成为了研究的热点。本文提出了一种基于纵横交叉算法优化BP神经网络的风机齿轮箱故障诊断方法,在风机齿轮箱实验平台中进行了验证。实验结果表明,本文提出的诊断方法能够有效地识别风机齿轮箱的故障类型,具有一定的参考价值。关键词:风机齿轮箱;故障诊断;BP神经网络;纵横交叉算法;引言随着风电行业的快速发展,风力发电机组的安全性和可靠性问题引起了

基于遗传算法优化BP神经网络的风机齿轮箱故障诊断.docx
基于遗传算法优化BP神经网络的风机齿轮箱故障诊断基于遗传算法优化BP神经网络的风机齿轮箱故障诊断摘要:风机齿轮箱在风能发电系统中起着重要的作用,但由于工作环境恶劣,易受到各种故障的影响,导致风机运行的稳定性和可靠性下降。因此,及时准确地诊断风机齿轮箱故障对风能发电系统的安全和经济运行至关重要。本文提出了一种基于遗传算法优化BP神经网络的风机齿轮箱故障诊断方法。通过遗传算法优化BP神经网络的权值和阈值,提高了模型的准确性和泛化能力。实验结果表明,该方法在风机齿轮箱故障诊断方面具有较好的性能和实用性。关键词:

基于ALNAFSA优化BP神经网络的行星齿轮箱故障诊断.docx
基于ALNAFSA优化BP神经网络的行星齿轮箱故障诊断摘要行星齿轮箱是风电场中常用的动力传动装置,针对其故障诊断问题,本文提出了一种基于ALNAFSA优化BP神经网络的故障诊断方法。首先,对行星齿轮箱故障的特征进行了分析,并提取出了5个有效的特征量。然后,运用ALNAFSA算法对BP神经网络的参数进行了优化,以提高其诊断准确率。最后,将该方法应用于行星齿轮箱的故障诊断中,并通过与传统BP神经网络和其他方法的实验对比,验证了该方法的有效性和优越性。关键词:行星齿轮箱;故障诊断;特征提取;ALNAFSA算法;