
一种自动苹果去皮机.pdf

一只****爱敏

1/8

2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种自动苹果去皮机.pdf
本发明公开了一种自动苹果去皮机,由机架,水平导轨,水平移动机构,螺旋升降机构,切削爪,控制台和旋转机构组成,属于食品加工机械领域。水平导轨固定在机架上方,水平移动机构安装在水平导轨上方,控制刀具水平移动。螺旋升降机机构安装在水平导轨下方,控制刀具上下移动,切削爪安装在螺旋升降机构一侧,能够带动刀具进行前后移动和旋转运动。控制台能够根据苹果轮廓控制刀具的位置。旋转机构主要带动苹果旋转完成主运动,配合刀具就能完成对苹果果皮的切削。本发明专利中的苹果去皮机能够准确地沿着苹果的轮廓对苹果进行自动去皮操作,同时保证

全自动苹果去皮机的设计与仿真的综述报告.docx
全自动苹果去皮机的设计与仿真的综述报告近些年来,随着科技的不断发展,人类的生活水平得到了极大的提高。在生活中,各种各样的家电产品已经成为人们日常生活中必不可少的存在。其中,全自动苹果去皮机是一种非常实用的厨房电器,可以大大减轻家庭烹饪的难度和工作量。因此,本文将从设计和仿真两个方面,对全自动苹果去皮机进行详细介绍和分析。一、设计全自动苹果去皮机的设计首先需要考虑的是它的整体结构。其主要由苹果夹持机构、切片机构、去皮机构、驱动机构、传动机构、控制机构和外壳等部分组成。其中,苹果夹持机构主要用于固定和保持苹果
一种自动芒果去皮机.pdf
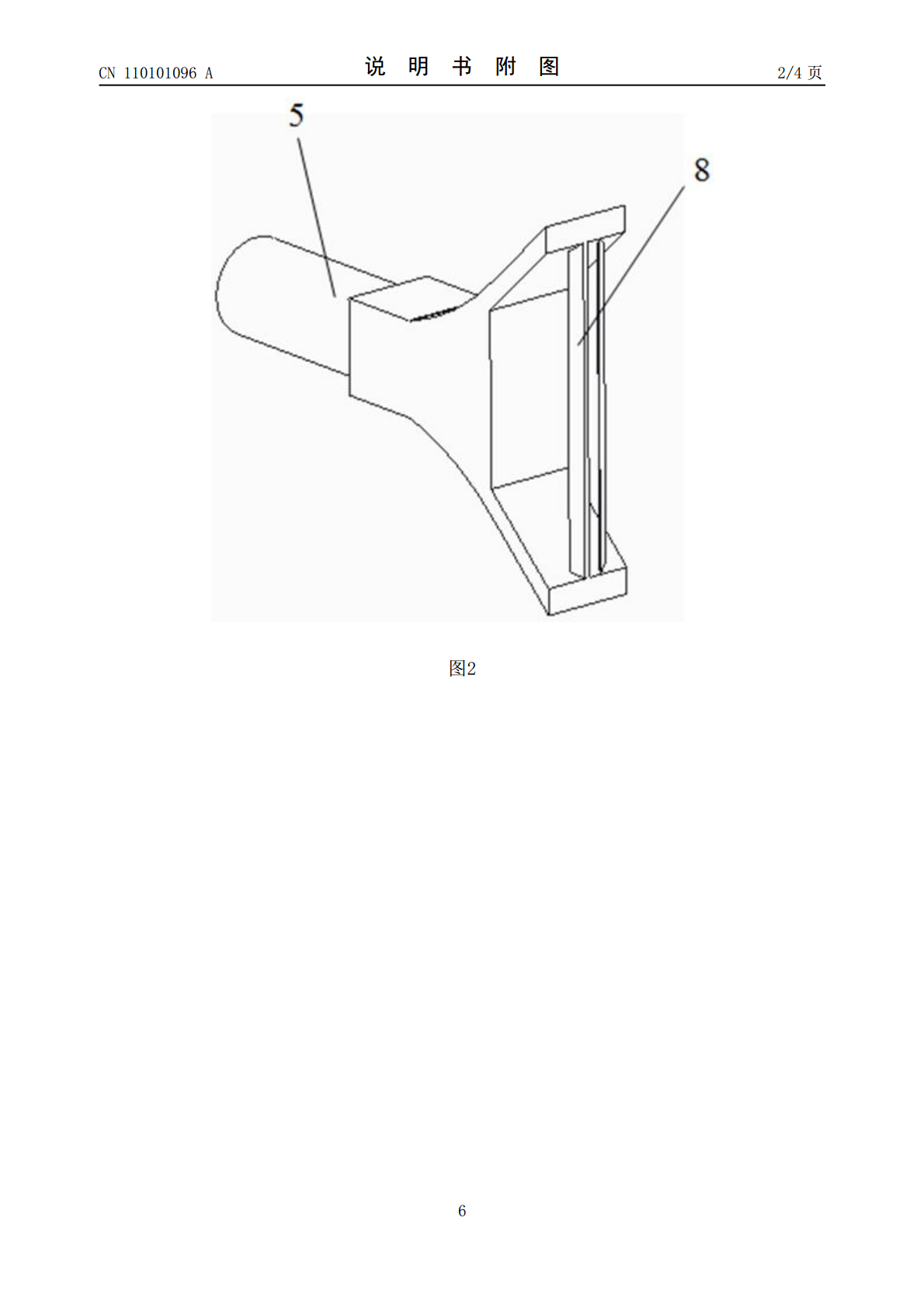
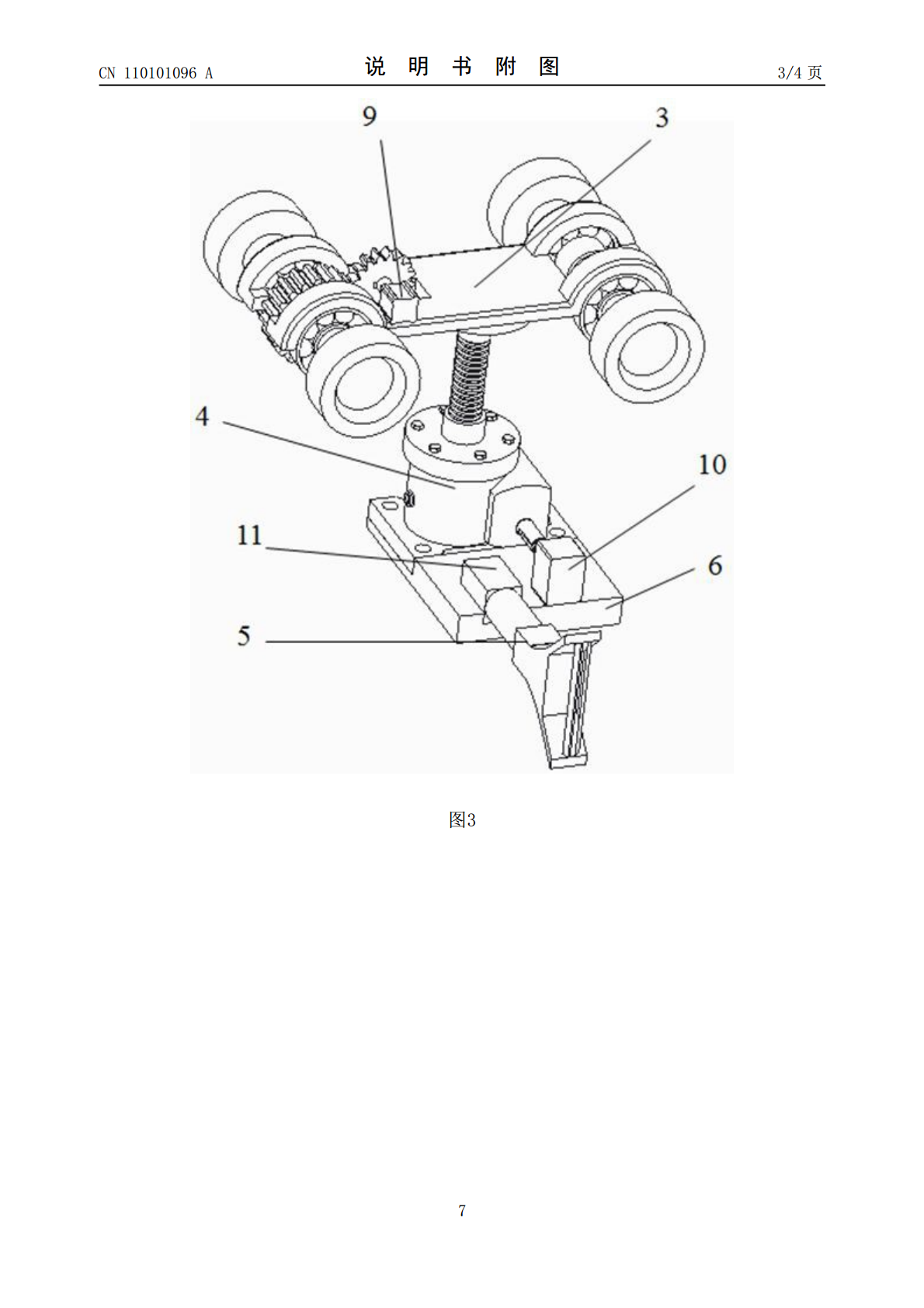
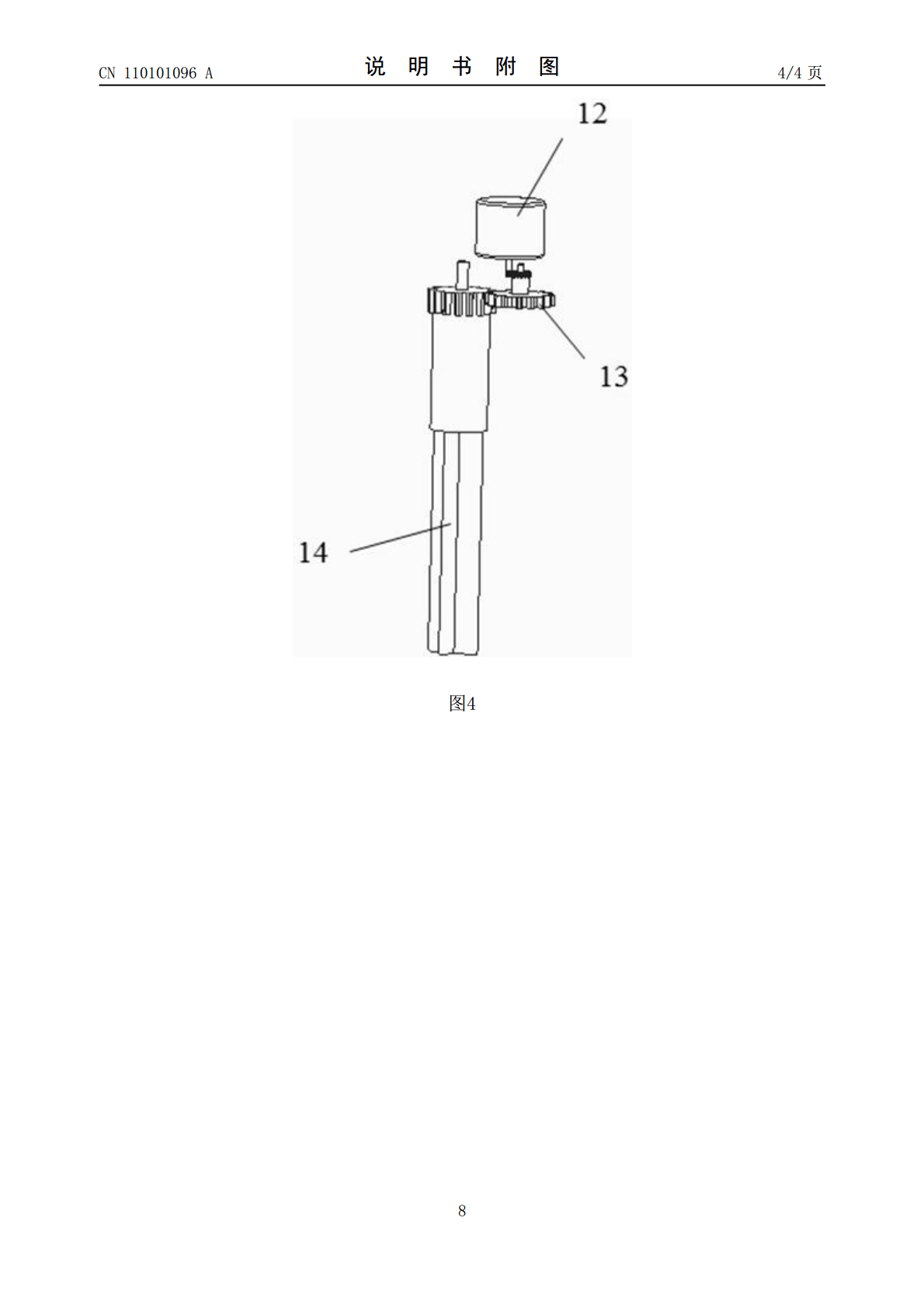
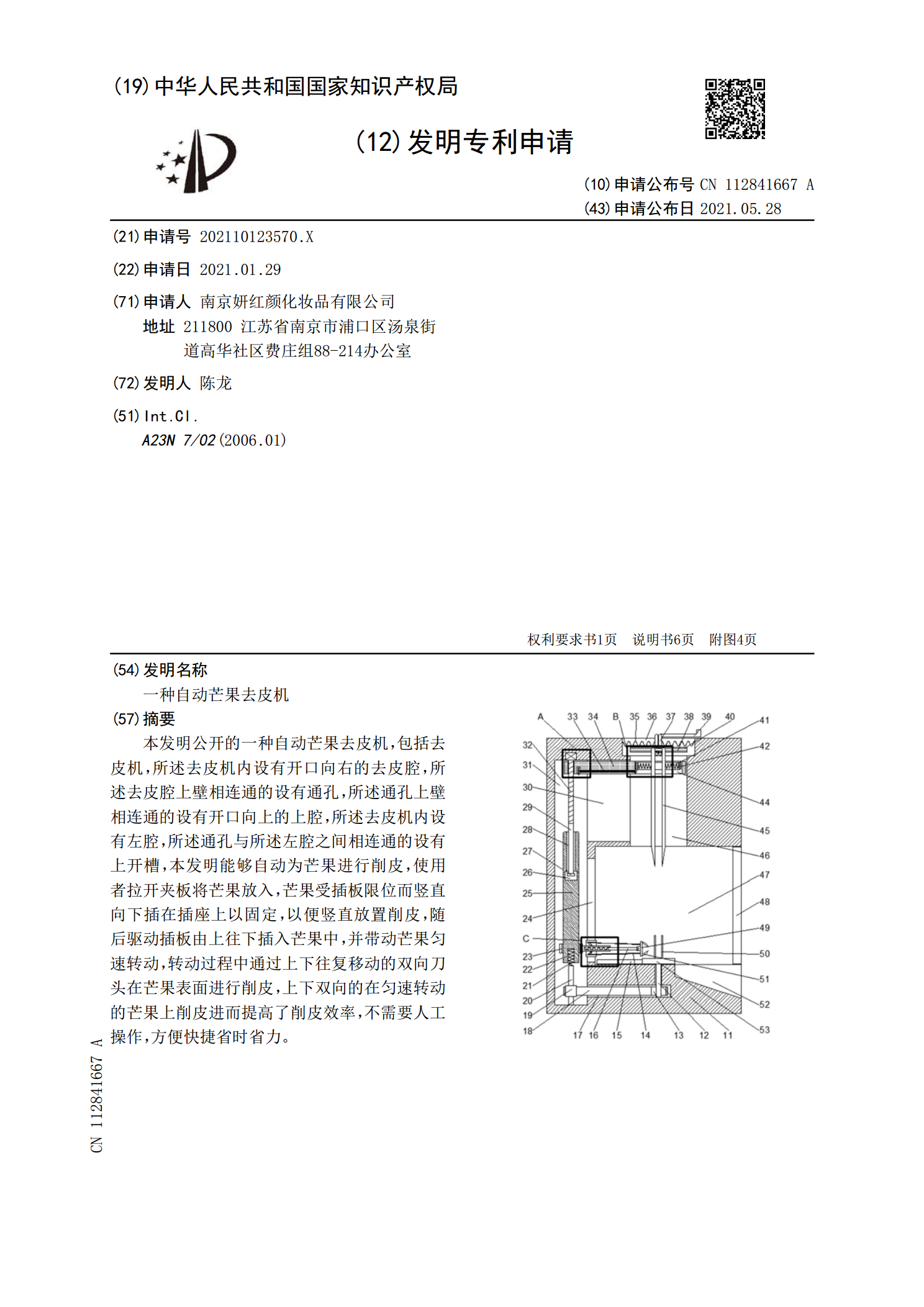
本发明公开的一种自动芒果去皮机,包括去皮机,所述去皮机内设有开口向右的去皮腔,所述去皮腔上壁相连通的设有通孔,所述通孔上壁相连通的设有开口向上的上腔,所述去皮机内设有左腔,所述通孔与所述左腔之间相连通的设有上开槽,本发明能够自动为芒果进行削皮,使用者拉开夹板将芒果放入,芒果受插板限位而竖直向下插在插座上以固定,以便竖直放置削皮,随后驱动插板由上往下插入芒果中,并带动芒果匀速转动,转动过程中通过上下往复移动的双向刀头在芒果表面进行削皮,上下双向的在匀速转动的芒果上削皮进而提高了削皮效率,不需要人工操作,方便

一种自动化去皮机.pdf
本发明公开了一种自动化去皮机,包括旋转平台、压辊装置、驱动装置;旋转平台由驱动装置驱动可绕中心做水平旋转;在旋转平台上以中心为环心,呈环形布置有若干擀压槽,以对应位于旋转平台旋转方向为前方,旋转方向的反方向为后方,擀压槽后方设有分离孔;压辊装置固定架设在旋转平台上,且位于擀压槽的环形运动路径的上方;随着旋转平台旋转,压辊装置可依次挤压位于各擀压槽内的物料,使其皮肉分离,肉从分离孔落下。本发明采用旋转平台作为去皮操作台,旋转平台上间隔设置有擀压槽和分离孔,随着旋转可以循环使用;压辊装置碾压放置在擀压槽上的豆
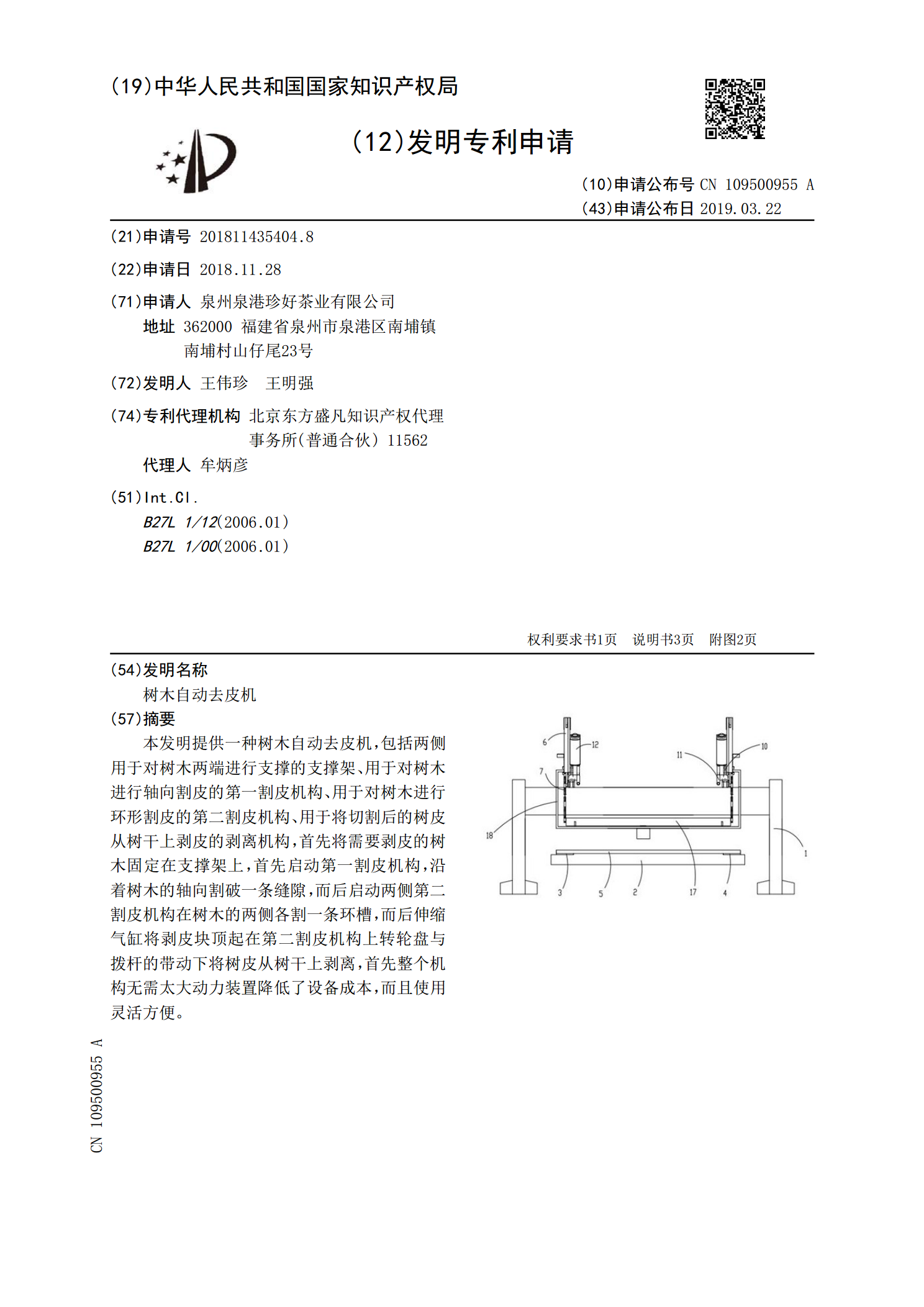
树木自动去皮机.pdf
本发明提供一种树木自动去皮机,包括两侧用于对树木两端进行支撑的支撑架、用于对树木进行轴向割皮的第一割皮机构、用于对树木进行环形割皮的第二割皮机构、用于将切割后的树皮从树干上剥皮的剥离机构,首先将需要剥皮的树木固定在支撑架上,首先启动第一割皮机构,沿着树木的轴向割破一条缝隙,而后启动两侧第二割皮机构在树木的两侧各割一条环槽,而后伸缩气缸将剥皮块顶起在第二割皮机构上转轮盘与拨杆的带动下将树皮从树干上剥离,首先整个机构无需太大动力装置降低了设备成本,而且使用灵活方便。