
一种考虑轮胎侧偏刚度变化的车辆侧向稳定控制方法.pdf

小代****回来


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种考虑轮胎侧偏刚度变化的车辆侧向稳定控制方法.pdf
本发明提出了一种考虑轮胎侧偏刚度变化的车辆侧向稳定控制方法,其主要步骤如下:根据车载传感器检测系统及二自由度车辆模型,计算当前驾驶员期望横摆角速度及质心侧偏角;车辆在运行过程中,轮胎侧偏刚度不断变化而具有不确定性,本发明利用轮胎载荷转移量及当前侧偏角大小,拟合轮胎侧偏刚度具体数值,并将其变化参数加入车辆控制模型中;引入轮胎侧偏角约束条件,采用模型预测控制算法,最终描述为优化约束问题,并求解出当前最优控制序列;最终通过执行器进行控制量输出,实现在考虑轮胎侧偏刚度变化情况下避免轮胎侧向力饱和现象的控制目标。
考虑多因素变化的轮胎侧偏刚度分区计算方法.pdf
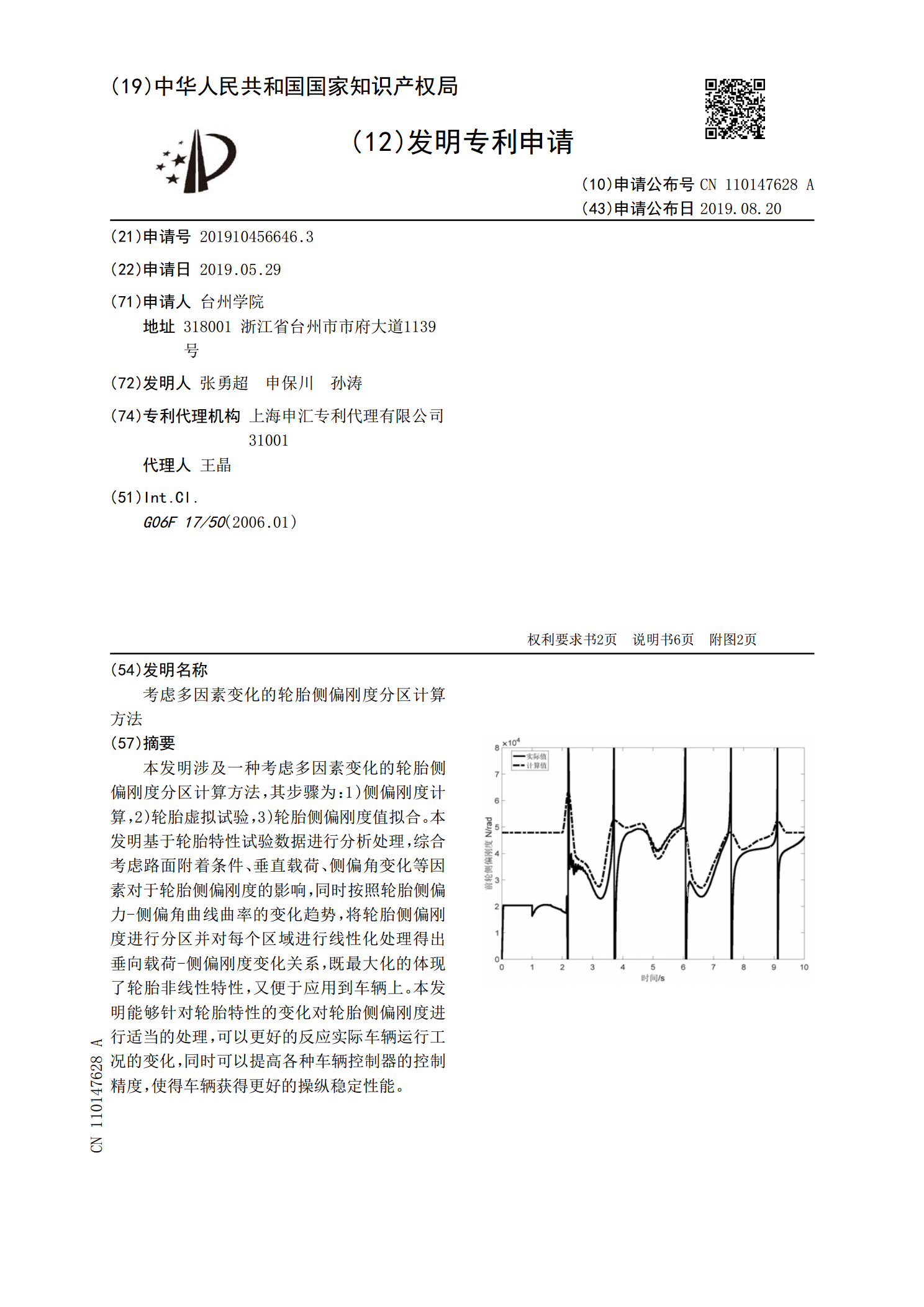
本发明涉及一种考虑多因素变化的轮胎侧偏刚度分区计算方法,其步骤为:1)侧偏刚度计算,2)轮胎虚拟试验,3)轮胎侧偏刚度值拟合。本发明基于轮胎特性试验数据进行分析处理,综合考虑路面附着条件、垂直载荷、侧偏角变化等因素对于轮胎侧偏刚度的影响,同时按照轮胎侧偏力‑侧偏角曲线曲率的变化趋势,将轮胎侧偏刚度进行分区并对每个区域进行线性化处理得出垂向载荷‑侧偏刚度变化关系,既最大化的体现了轮胎非线性特性,又便于应用到车辆上。本发明能够针对轮胎特性的变化对轮胎侧偏刚度进行适当的处理,可以更好的反应实际车辆运行工况的变化

轮胎侧偏刚度的测试及辨识方法.pdf
本发明公开了一种轮胎侧偏刚度的测试及辨识方法,包括侧偏刚度试验准备以及测试;按照设定的采样频率对测试进行数据采集;采集多个周期数据,根据周期数据绘制侧向力‑侧偏角曲线,并对其进行曲线拟合,取一次项系数作为第一侧偏刚度数值;评估多个周期偏刚度数值差异,并进行优化;通过侧偏特性试验准备以及侧偏特性测试,得到输出侧偏特性试验数据,并以此得到第二侧偏刚度数值和回正刚度数值;根据输出的侧偏角特性试验数据,对模型参数进行模型辨识;通过第一侧偏刚度对模型辨识进行修正;本发明能够控制试验过程中的轮胎温度及胎面磨损,得到高

考虑轮胎侧偏刚度的后驱汽车转向中心研究.docx
考虑轮胎侧偏刚度的后驱汽车转向中心研究论文题目:轮胎侧偏刚度对后驱汽车转向中心的影响研究摘要:轮胎侧偏刚度是指轮胎在侧向偏移时产生的恢复力。在后驱汽车中,轮胎的侧偏刚度对转向中心的定位和稳定性起着重要作用。本文通过对轮胎侧偏刚度的研究,探讨了其对后驱汽车转向性能的影响,并对轮胎侧偏刚度的优化设计提出了一些建议。关键词:轮胎侧偏刚度,后驱汽车,转向中心,性能,优化设计1.引言后驱汽车作为一种常见的汽车传动形式,其转向性能直接影响着车辆的操控性和稳定性。轮胎作为汽车与地面直接接触的关键部件,其侧偏刚度对后驱汽

考虑轮胎侧偏刚度的后驱汽车转向中心研究.pptx
考虑轮胎侧偏刚度的后驱汽车转向中心研究目录添加章节标题后驱汽车转向中心研究背景汽车转向系统的重要性转向中心研究的发展历程轮胎侧偏刚度对汽车转向性能的影响研究目的和意义轮胎侧偏刚度的基本原理轮胎侧偏刚度的定义轮胎侧偏刚度的测量方法轮胎侧偏刚度对汽车行驶稳定性的影响轮胎侧偏刚度与汽车转向性能的关系后驱汽车转向中心模型建立后驱汽车转向系统的基本结构建立后驱汽车转向中心模型的方法考虑轮胎侧偏刚度的转向中心模型参数确定转向中心模型验证与仿真分析实验设计与结果分析实验目的与实验条件实验过程与方法实验结果展示与分析结果