
一种弹簧储能式跳跃机构.pdf

一只****ua

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种弹簧储能式跳跃机构.pdf
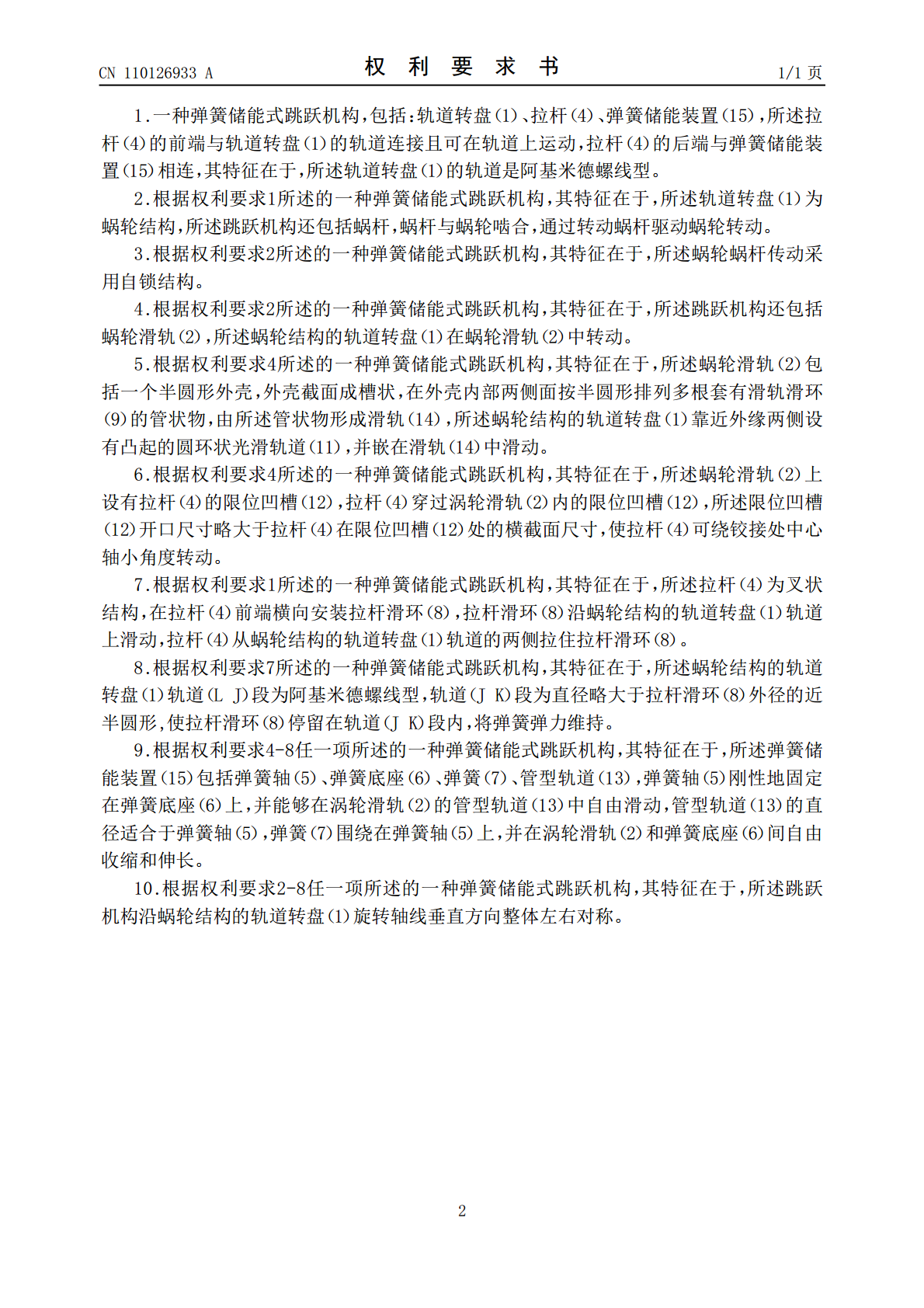
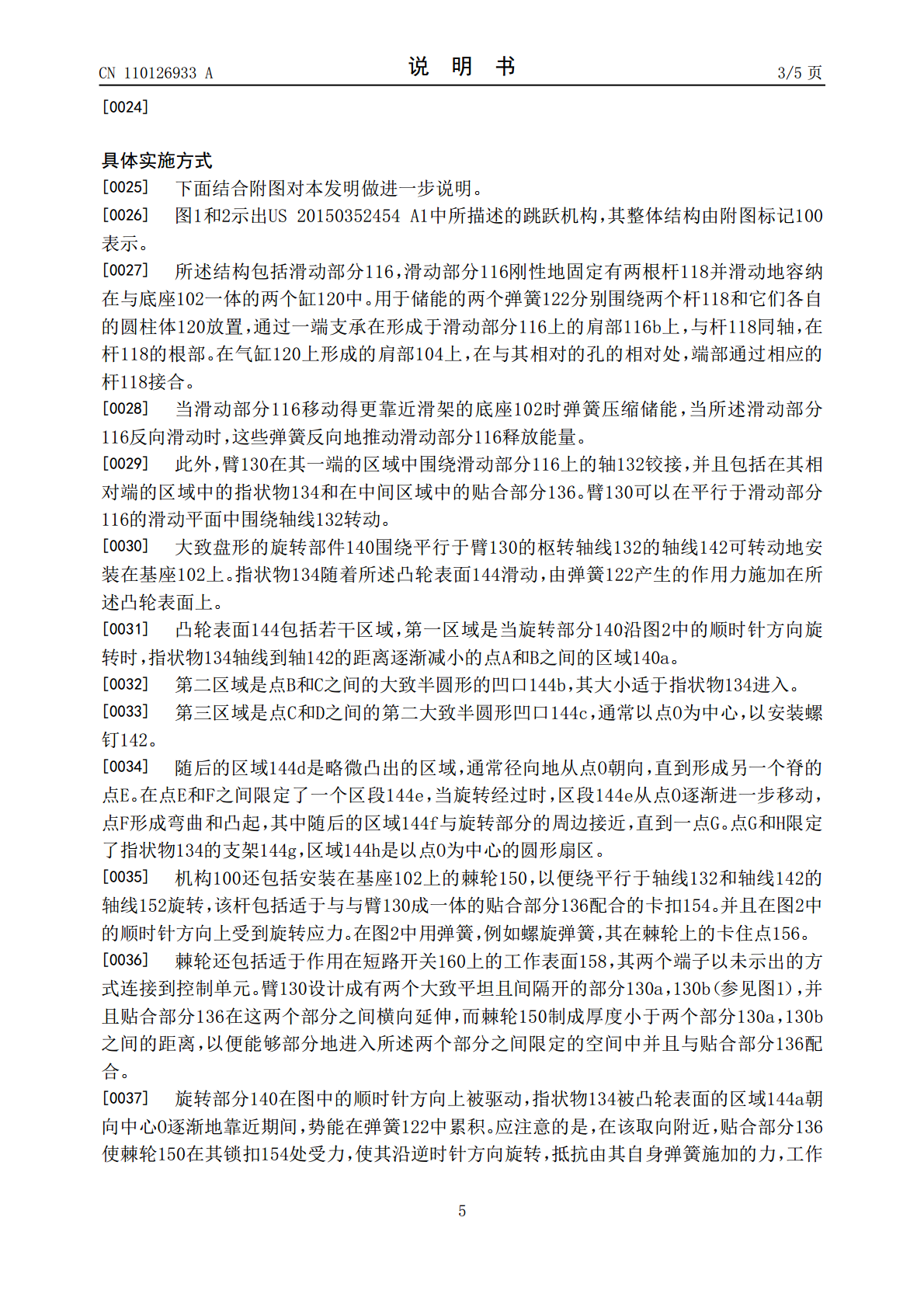
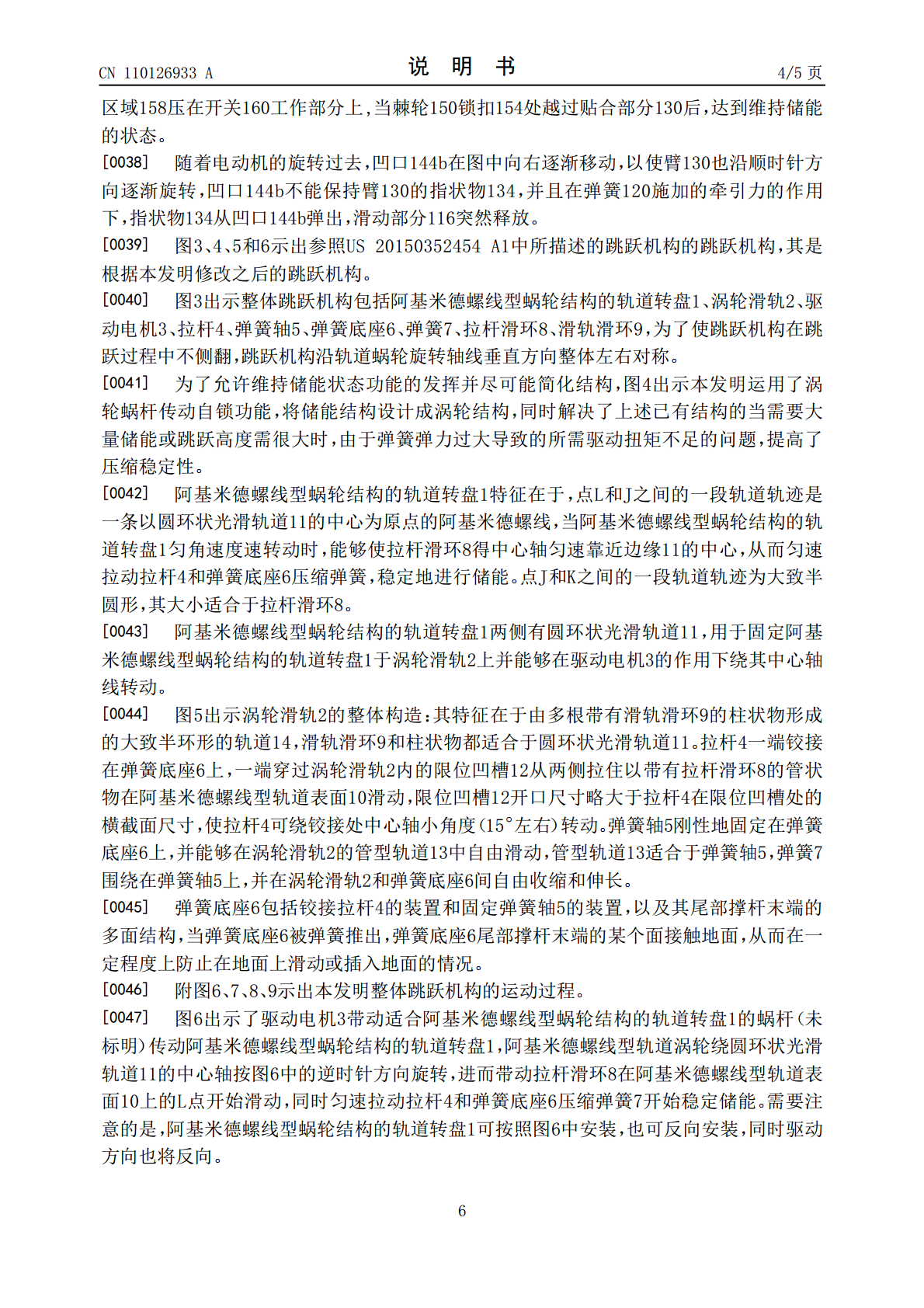
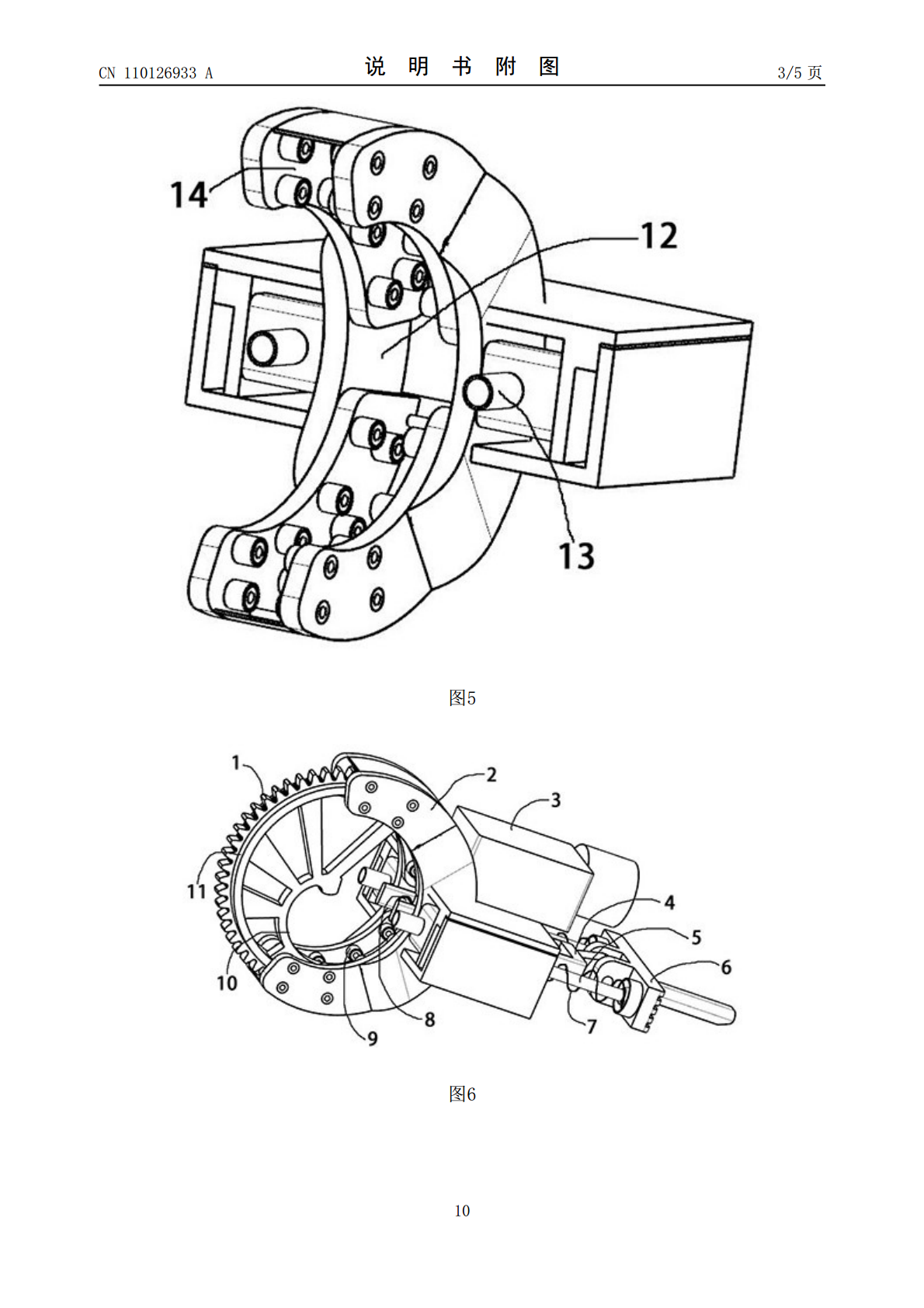
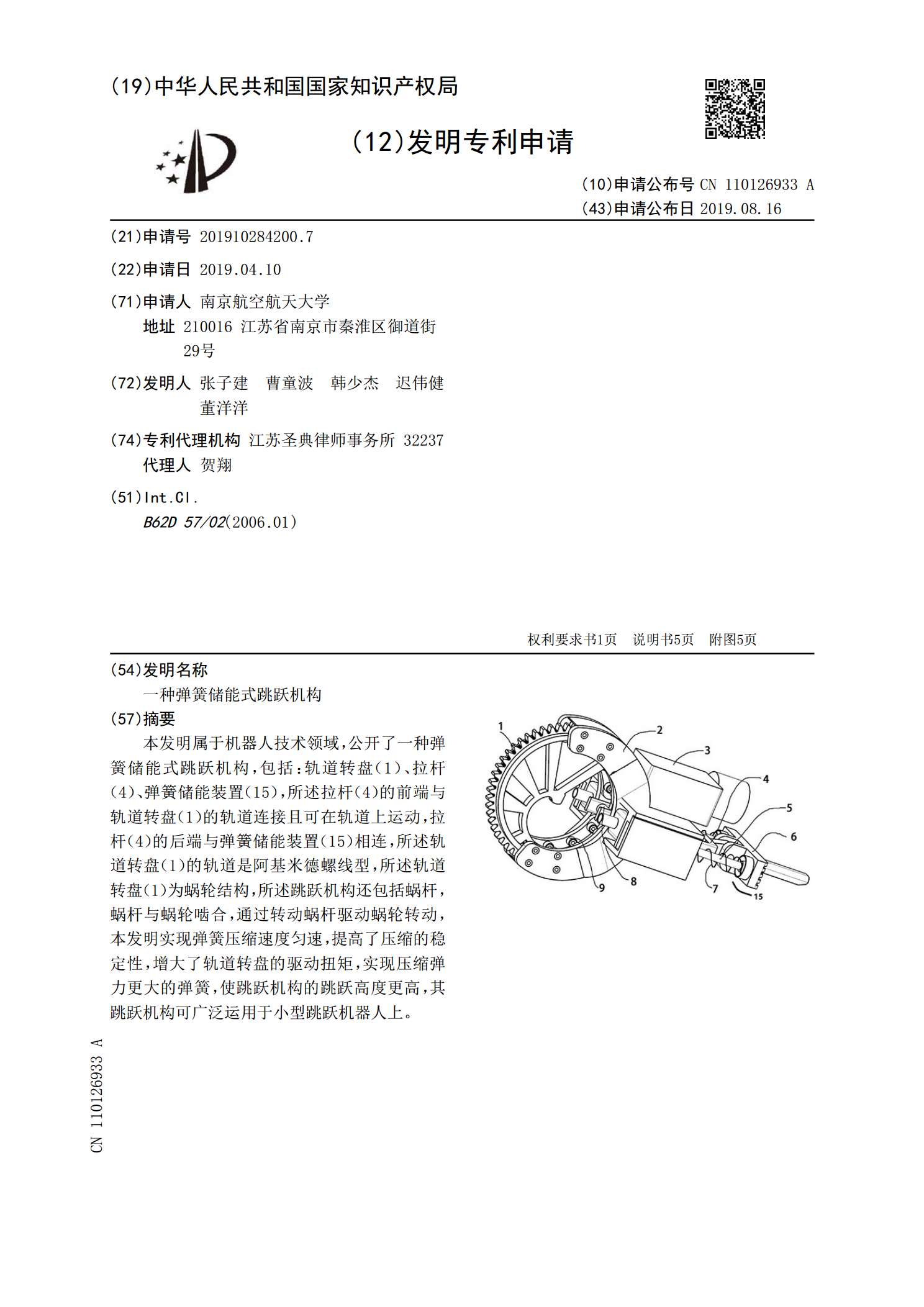
本发明属于机器人技术领域,公开了一种弹簧储能式跳跃机构,包括:轨道转盘(1)、拉杆(4)、弹簧储能装置(15),所述拉杆(4)的前端与轨道转盘(1)的轨道连接且可在轨道上运动,拉杆(4)的后端与弹簧储能装置(15)相连,所述轨道转盘(1)的轨道是阿基米德螺线型,所述轨道转盘(1)为蜗轮结构,所述跳跃机构还包括蜗杆,蜗杆与蜗轮啮合,通过转动蜗杆驱动蜗轮转动,本发明实现弹簧压缩速度匀速,提高了压缩的稳定性,增大了轨道转盘的驱动扭矩,实现压缩弹力更大的弹簧,使跳跃机构的跳跃高度更高,其跳跃机构可广泛运用于小型跳
一种齿轮储能共轴传动式弹簧操动机构.pdf
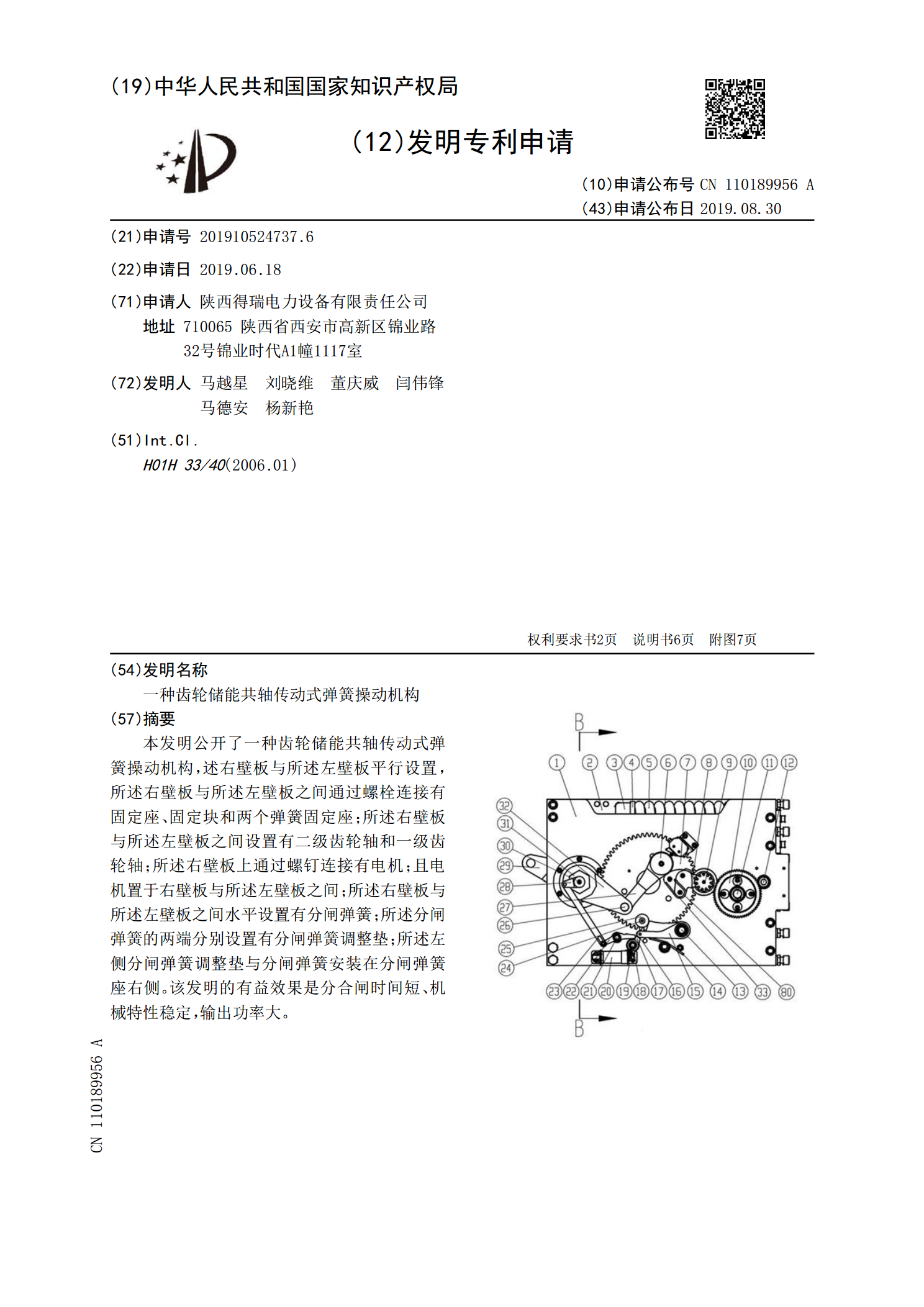
本发明公开了一种齿轮储能共轴传动式弹簧操动机构,述右壁板与所述左壁板平行设置,所述右壁板与所述左壁板之间通过螺栓连接有固定座、固定块和两个弹簧固定座;所述右壁板与所述左壁板之间设置有二级齿轮轴和一级齿轮轴;所述右壁板上通过螺钉连接有电机;且电机置于右壁板与所述左壁板之间;所述右壁板与所述左壁板之间水平设置有分闸弹簧;所述分闸弹簧的两端分别设置有分闸弹簧调整垫;所述左侧分闸弹簧调整垫与分闸弹簧安装在分闸弹簧座右侧。该发明的有益效果是分合闸时间短、机械特性稳定,输出功率大。
一种预储能弹簧操作机构.pdf
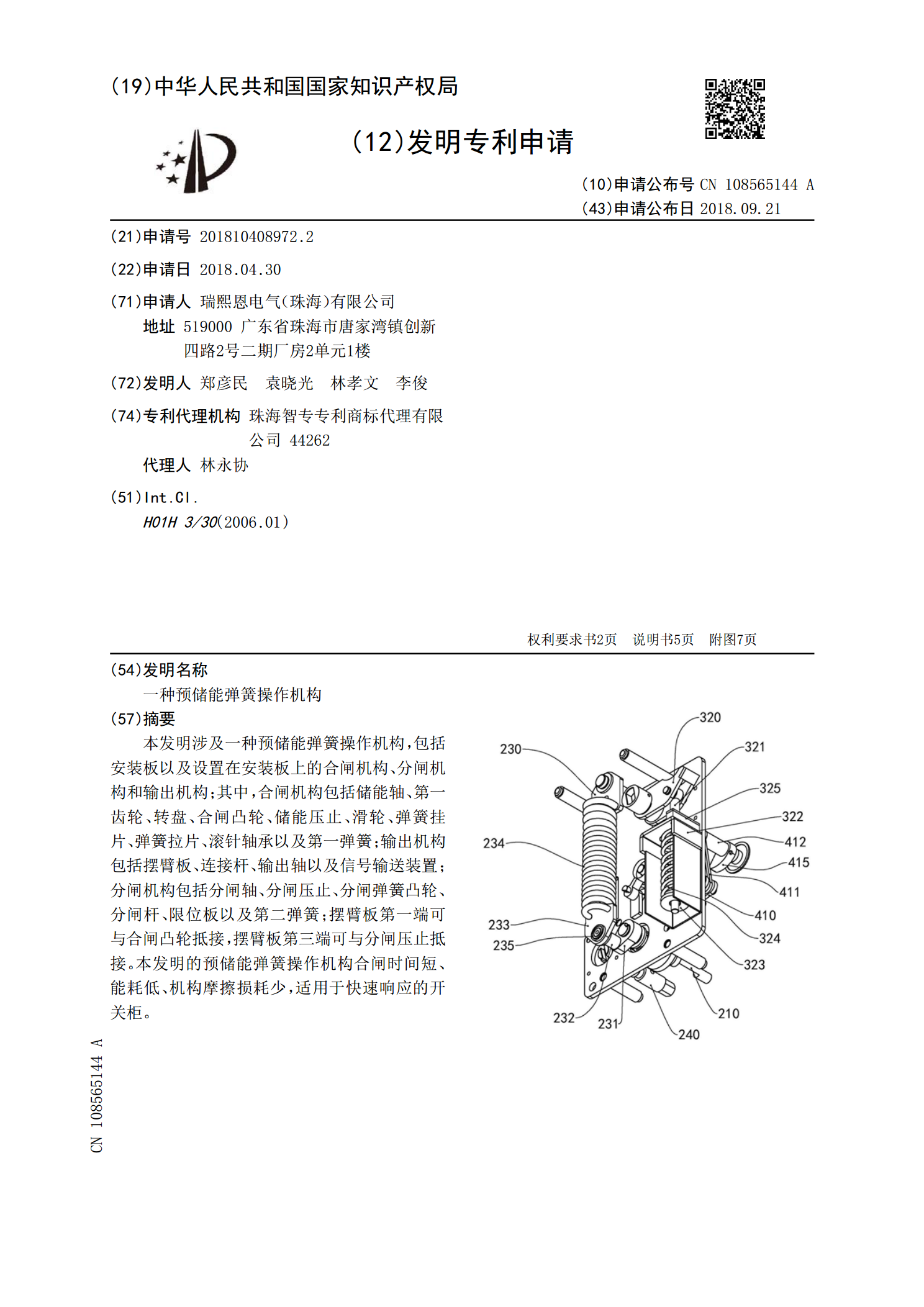
本发明涉及一种预储能弹簧操作机构,包括安装板以及设置在安装板上的合闸机构、分闸机构和输出机构;其中,合闸机构包括储能轴、第一齿轮、转盘、合闸凸轮、储能压止、滑轮、弹簧挂片、弹簧拉片、滚针轴承以及第一弹簧;输出机构包括摆臂板、连接杆、输出轴以及信号输送装置;分闸机构包括分闸轴、分闸压止、分闸弹簧凸轮、分闸杆、限位板以及第二弹簧;摆臂板第一端可与合闸凸轮抵接,摆臂板第三端可与分闸压止抵接。本发明的预储能弹簧操作机构合闸时间短、能耗低、机构摩擦损耗少,适用于快速响应的开关柜。
一种弹簧操动储能机构.pdf
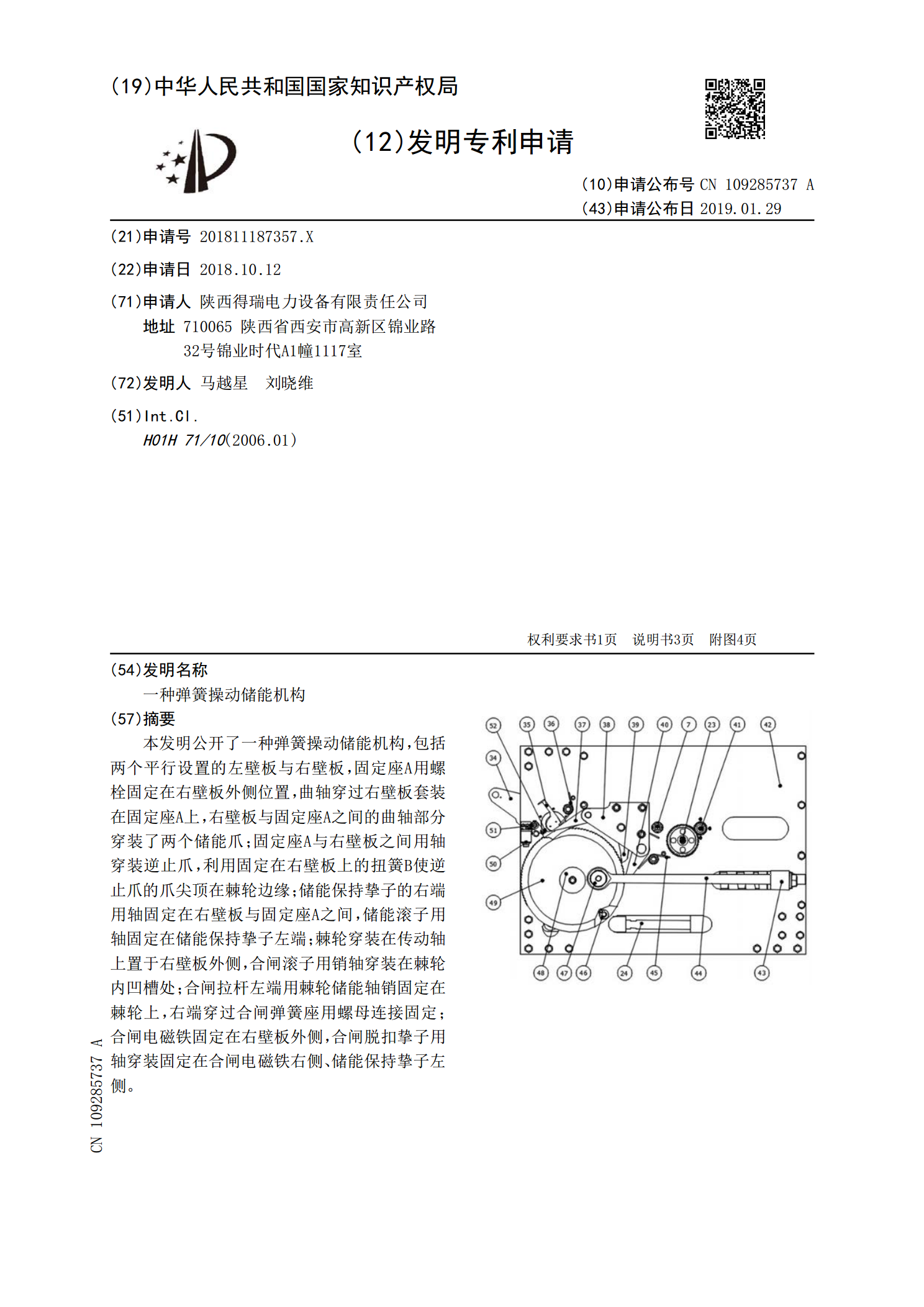
本发明公开了一种弹簧操动储能机构,包括两个平行设置的左壁板与右壁板,固定座A用螺栓固定在右壁板外侧位置,曲轴穿过右壁板套装在固定座A上,右壁板与固定座A之间的曲轴部分穿装了两个储能爪;固定座A与右壁板之间用轴穿装逆止爪,利用固定在右壁板上的扭簧B使逆止爪的爪尖顶在棘轮边缘;储能保持挚子的右端用轴固定在右壁板与固定座A之间,储能滚子用轴固定在储能保持挚子左端;棘轮穿装在传动轴上置于右壁板外侧,合闸滚子用销轴穿装在棘轮内凹槽处;合闸拉杆左端用棘轮储能轴销固定在棘轮上,右端穿过合闸弹簧座用螺母连接固定;合闸电磁

一种合闸弹簧储能传动机构.pdf
本发明涉及一种合闸弹簧储能传动机构,包括具有圆柱状弹簧容置腔的合闸弹簧筒、设于弹簧容置腔中的可沿弹簧容置腔轴线方向往复运动的弹簧托盘以及设于该弹簧托盘上的沿所述弹簧容置腔轴向方向在容置腔腔壁上滚动的滚轮,该滚轮为中间粗两头细的鼓形结构且其外周面与所述弹簧容置腔腔壁凹凸互补滚压配合,所述滚轮外周面上沿该滚轮轴向方向连接该滚轮两端的线段均为圆弧段,所述圆弧段所在圆的直径均与所述合闸弹簧筒通孔直径相等。本发明滚轮与弹簧容置腔腔壁始终保持线接触,与现有技术中的点接触相比,减小了接触位置的压强,利于润滑油脂在滚轮上