
一种基于物联网控制的汽车防撞装置及方法.pdf

康平****ng


1/10
2/10

3/10
4/10

5/10

6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于物联网控制的汽车防撞装置及方法.pdf
本发明公开了一种基于物联网控制的汽车防撞装置,包括:多个安全气囊,其分别安装在汽车的前后保险杠上;多个摄像头,其分别安装在汽车的头部、尾部和两侧;车速传感器,其设置在汽车轮毂上;多个雷达,其分别安装在汽车的头部、尾部和两侧;转角传感器,其设置在汽车方向盘上,用于测量所述方向盘转角;加速度传感器,其设置在汽车车身,用于检测汽车加速度;控制器,其与所述摄像头、所述安全气囊、所述车速传感器、所述雷达连接,并控制所述安全气囊的工作状态。本发明提供了一种基于物联网控制的汽车防撞装置,其能够实时监测汽车所处的路况状态

一种基于物联网的汽车导航装置.pdf
本发明公开了一种基于物联网的汽车导航装置,包括底座,所述底座的底部固定连接有吸盘,所述底座的中部开设有活动槽,所述活动槽的内部活动连接有圆球,所述活动槽的两侧内部均活动连接有滚珠,所述滚珠与圆球活动搭接,所述圆球的顶部固定连接有支撑杆,所述底座顶部的两侧均固定连接有通过连杆固定连接有固定套,所述固定套的内部活动连接有限位杆,所述限位杆的一端固定连接有拉板。该基于物联网的汽车导航装置,通过设置圆球、限位杆、压块、连接耳和螺栓,能够对导航装置的角度进行调节,进而可以根据不同司机的坐姿进行调整,满足不同使用者的

一种基于物联网的车辆入库智能防撞报警装置.pdf
本发明涉及一种基于物联网的车辆入库智能防撞报警装置,包括承载槽、导向轨、承载柱、报警蜂鸣器、报警爆闪灯、测距装置及控制电路,承载柱嵌于承载槽内,承载柱与导向轨间通过行走机构相互连接,顶端设接近传感器和一个测距装置,承载柱侧表面沿承载柱轴线方向均布至少三层测距装置,报警蜂鸣器、报警爆闪灯若干,并分别安装在承载柱的顶部及侧表面上,控制电路嵌于承载柱内,并分别与报警蜂鸣器、报警爆闪灯、测距装置及行走机构电气连接。本发明一方面可有效的节省场地空间,降低空间占用率,另一方面可根据车辆运行情况提供主动防撞预警操作,从
一种基于物联网的自助借还机控制方法及装置.pdf
本发明提供的基于物联网的自助借还机控制方法及装置,获取目标自动借还机的第一使用状态信息;从所述第一使用状态信息中抽取关键信息,其中,所述关键信息包括:可更新关键信息和/或不可更新关键信息;所述可更新关键信息包括:预设运行状态轨迹图上的运行状态关键信息,所述不可更新关键信息包括:存在控制标签的不可更新信息和不存在控制标签的不可更新信息中至少一项;根据所述可更新关键信息和/或所述不可更新关键信息,判断所述目标自动借还机是否存在误动信息;若判断结果为是,则基于预设的借还机校正码对所述误动信息误动校正。如此,通过
一种基于物联网的智能控制装置.pdf
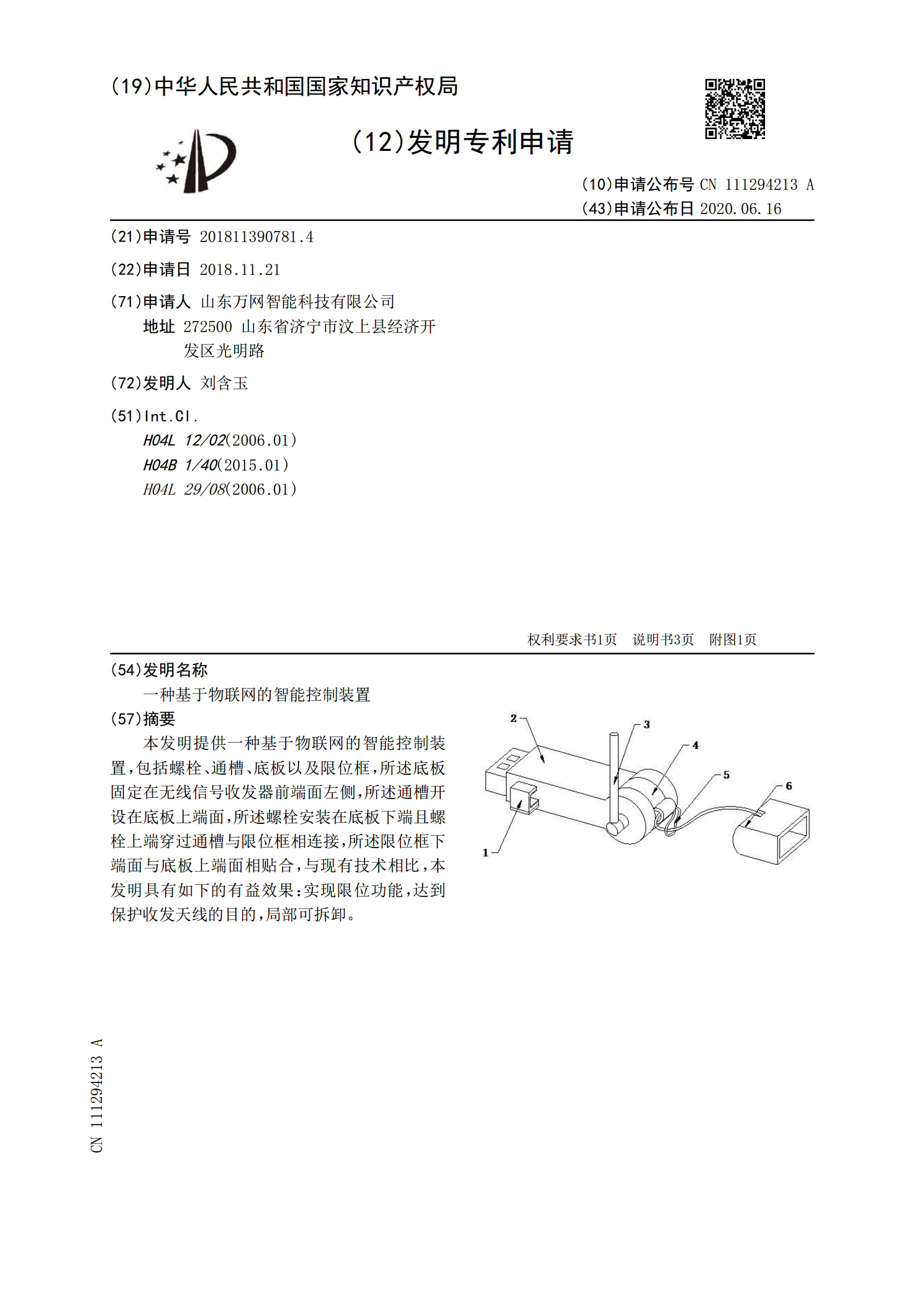
本发明提供一种基于物联网的智能控制装置,包括螺栓、通槽、底板以及限位框,所述底板固定在无线信号收发器前端面左侧,所述通槽开设在底板上端面,所述螺栓安装在底板下端且螺栓上端穿过通槽与限位框相连接,所述限位框下端面与底板上端面相贴合,与现有技术相比,本发明具有如下的有益效果:实现限位功能,达到保护收发天线的目的,局部可拆卸。