
一种包装袋自动分离装置.pdf

俊英****22


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种包装袋自动分离装置.pdf
一种包装袋自动分离装置,其特征在于:包括机架以及安装于机架内部的分离装置、竖直输送装置和水平输送装置,所述分离装置将包装袋分离后运送至竖直输送装置,所述输送装置将包装袋运送至水平输送装置。本发明申请包装袋自动分离装置采用转向板控制包装袋运输方向,执行装置简单易维护,控制准确。在合理设计行星轮装置转换旋向时间间隔的前提下,能够实现包装袋完全自动化分离,提高包装袋分离效率,减少了人工以及装置体积。同时,通过对转换旋向时间间隔和水平输送带长度的调整,可广泛应用于各种尺寸的包装袋。

一种软体输液袋包装袋的自动切割分离装置.pdf
一种软体输液袋包装袋的自动切割分离装置,包括一工作平台,工作平台上相对间隔设有止挡架体和切割机构支架,止挡架体与切割机构支架相对的内侧分别设有导流板一和导流板二,切割机构支架顶面设有一切割机构;导流板一和导流板二的侧面设有去袋机构,去袋机构包括橡胶轮组件一、橡胶轮组件二以及去袋气缸;导流板一和导流板二下方的工作平台上设有输送机构,输送机构包括直线导轨一、推板一、推板二以及推板推送气缸,推板二可滑动设于直线导轨一上,推板一通过导杆可相对移动的设置于推板二后端部的顶面上,推板推送气缸与推板一连接。本发明可代替
包装袋分离装置.pdf
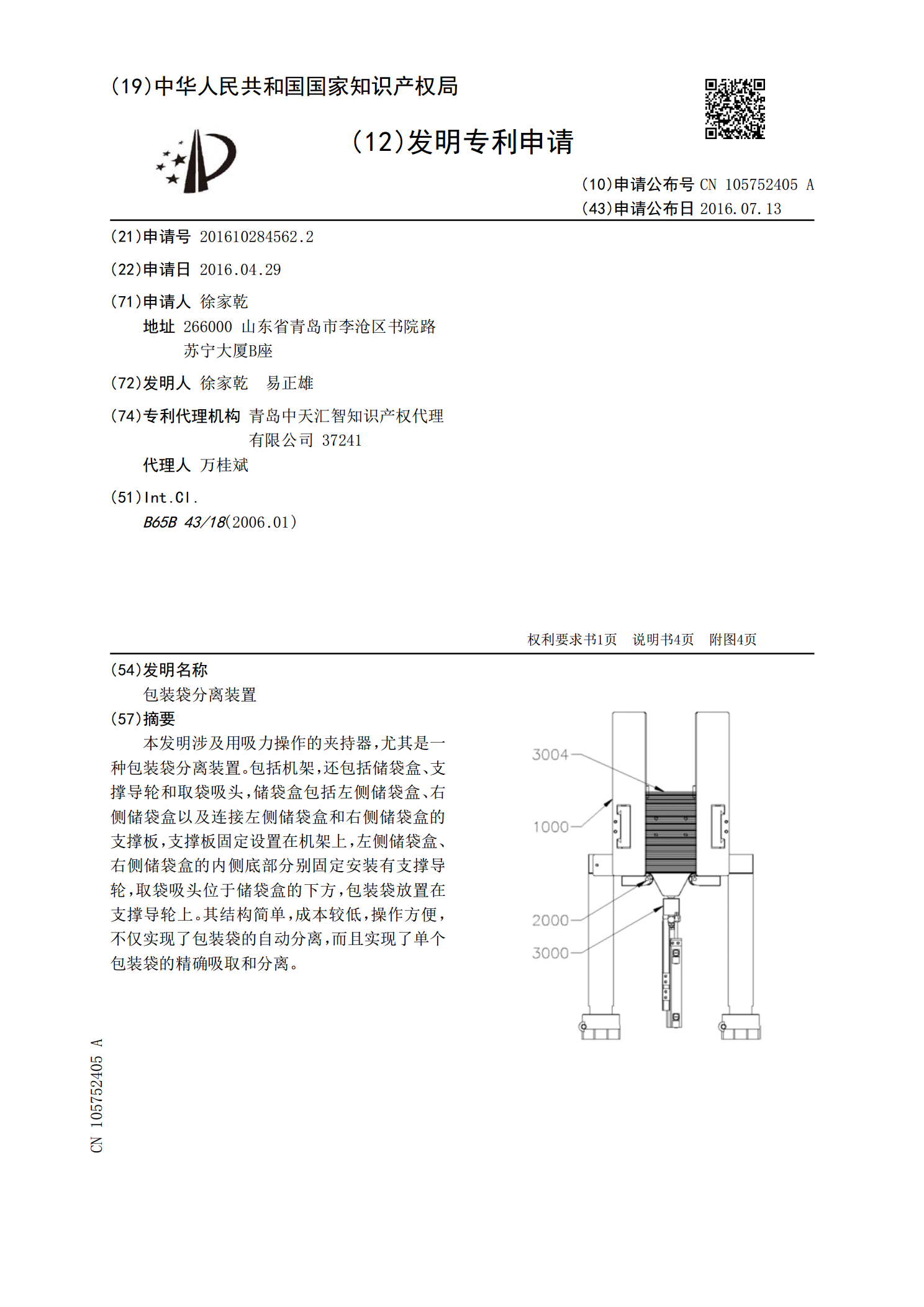
本发明涉及用吸力操作的夹持器,尤其是一种包装袋分离装置。包括机架,还包括储袋盒、支撑导轮和取袋吸头,储袋盒包括左侧储袋盒、右侧储袋盒以及连接左侧储袋盒和右侧储袋盒的支撑板,支撑板固定设置在机架上,左侧储袋盒、右侧储袋盒的内侧底部分别固定安装有支撑导轮,取袋吸头位于储袋盒的下方,包装袋放置在支撑导轮上。其结构简单,成本较低,操作方便,不仅实现了包装袋的自动分离,而且实现了单个包装袋的精确吸取和分离。

包装袋分离装置.pdf
本发明公开了一种包装袋分离装置,包括机架,机架上转动设有主动轮和从动轮,主动轮与从动轮之间张紧有传送带,传送带上方的机架上设有第一往复驱动机构和第二往复驱动机构,第一往复驱动机构上设有活塞杆,活塞杆上连有第一楔块,活塞杆上转动连有轴杆,轴杆上设有螺旋滑槽,轴杆上缠绕有感应线圈,感应线圈外设有磁场机构,第一楔块的楔面相抵有第二楔块,第二楔块一端弹性连接在机架上,第二楔块的另一端相抵于滑槽内,轴杆上设有第一切割刀,第一切割刀内设有加热片,加热片与感应线圈电连通,第二往复驱动机构上设有第二切割刀,第二切割刀上设
一种自动包装袋封口裁切装置.pdf
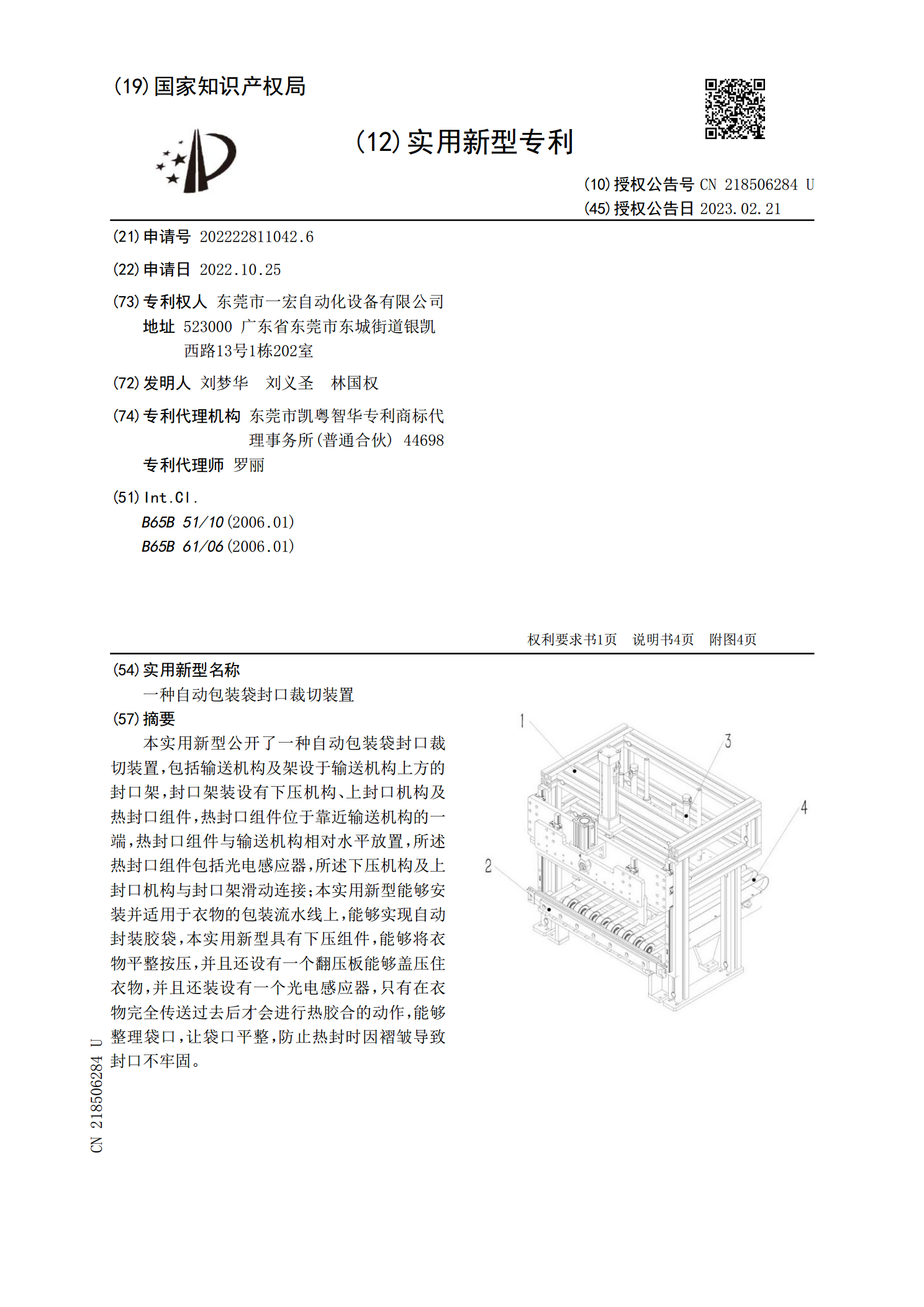
本实用新型公开了一种自动包装袋封口裁切装置,包括输送机构及架设于输送机构上方的封口架,封口架装设有下压机构、上封口机构及热封口组件,热封口组件位于靠近输送机构的一端,热封口组件与输送机构相对水平放置,所述热封口组件包括光电感应器,所述下压机构及上封口机构与封口架滑动连接;本实用新型能够安装并适用于衣物的包装流水线上,能够实现自动封装胶袋,本实用新型具有下压组件,能够将衣物平整按压,并且还设有一个翻压板能够盖压住衣物,并且还装设有一个光电感应器,只有在衣物完全传送过去后才会进行热胶合的动作,能够整理袋口,让