
一种物体体积测量方法、装置及移动终端.pdf

鹏飞****可爱

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种物体体积测量方法、装置及移动终端.pdf
本发明涉及一种物体体积测量方法,包括:获取待测物体的深度图像;根据所述深度图像对待测物体进行粗定位,获得所述待测物体的边缘轮廓区域;扩展所述边缘轮廓区域获得扩展区域,所述扩展区域对应于所述待测物体的支撑面;根据所述边缘轮廓区域和所述扩展区域获取所述待测物体的长度、宽度和高度;使用所述长度、宽度和高度计算所述待测物体的体积。本发明的物体体积测量方法可以快速、准确的测量待测物体的体积,有利于物流打包过程的自动化。
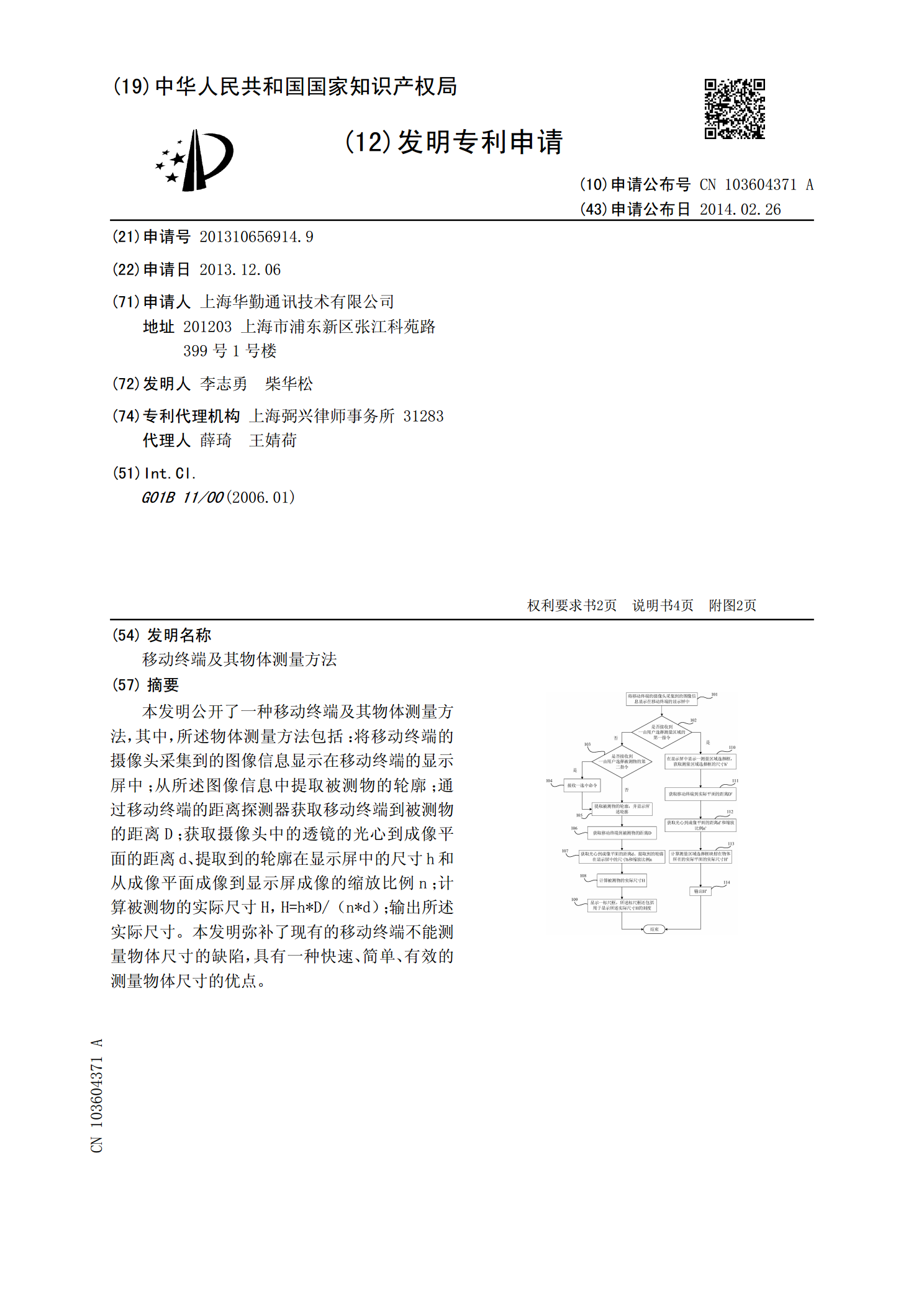
移动终端及其物体测量方法.pdf
本发明公开了一种移动终端及其物体测量方法,其中,所述物体测量方法包括:将移动终端的摄像头采集到的图像信息显示在移动终端的显示屏中;从所述图像信息中提取被测物的轮廓;通过移动终端的距离探测器获取移动终端到被测物的距离D;获取摄像头中的透镜的光心到成像平面的距离d、提取到的轮廓在显示屏中的尺寸h和从成像平面成像到显示屏成像的缩放比例n;计算被测物的实际尺寸H,H=h*D/(n*d);输出所述实际尺寸。本发明弥补了现有的移动终端不能测量物体尺寸的缺陷,具有一种快速、简单、有效的测量物体尺寸的优点。
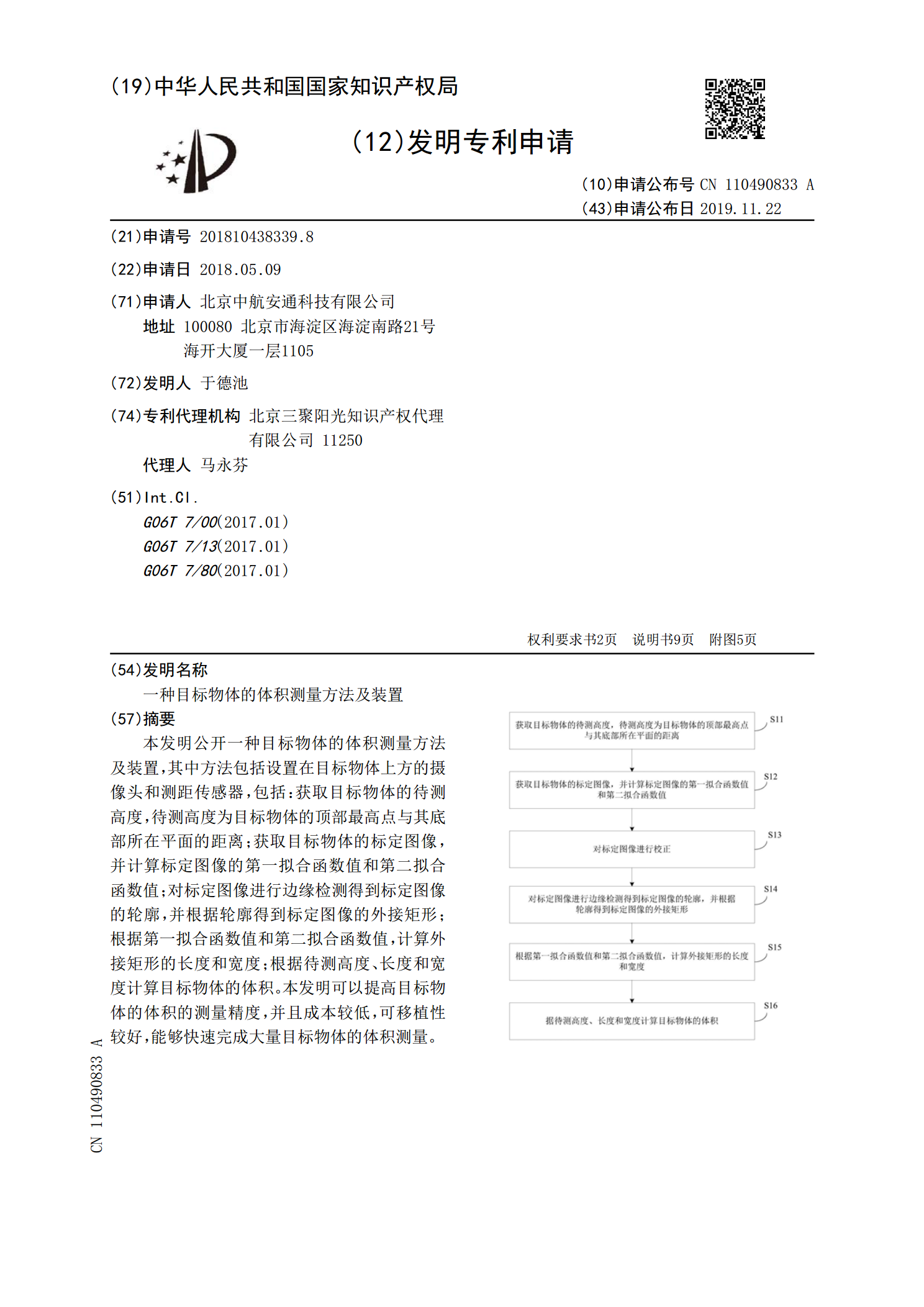
一种目标物体的体积测量方法及装置.pdf
本发明公开一种目标物体的体积测量方法及装置,其中方法包括设置在目标物体上方的摄像头和测距传感器,包括:获取目标物体的待测高度,待测高度为目标物体的顶部最高点与其底部所在平面的距离;获取目标物体的标定图像,并计算标定图像的第一拟合函数值和第二拟合函数值;对标定图像进行边缘检测得到标定图像的轮廓,并根据轮廓得到标定图像的外接矩形;根据第一拟合函数值和第二拟合函数值,计算外接矩形的长度和宽度;根据待测高度、长度和宽度计算目标物体的体积。本发明可以提高目标物体的体积的测量精度,并且成本较低,可移植性较好,能够快速

一种物体体积快速测量方法.pdf
本发明提供一种利用单目视觉定位原理和二维激光扫描仪测量物体体积的方法。技术方案是:将单目视觉定位系统与二维激光扫描仪架设于轮式车辆任意一侧,轮式车辆绕行物体一周,并包括下述步骤:第一步,采集数据;第二步,计算在每个定位时刻二维激光扫描仪在路面的投影点位置坐标;第三步,计算在获得每条物体轮廓线时刻二维激光扫描仪在路面的投影点位置坐标;第四步,获得物体三维重建结果并计算出物体体积。本发明的有益效果在于可对不规则形状物体实施全方位快速扫描,获得物体体积的速度快,精度较高,自动化程度高。而且,本发明算法较简单,设

一种移动终端配套装置、移动终端及移动终端控制方法.pdf
本发明公开了一种移动终端配套装置、移动终端及移动终端控制方法,包括:连接请求模块,用于当所述配套装置与所述移动终端的贴合距离达到阈值时,根据所述移动终端的识别信息,生成点对点的连接请求信息;第一通信模块,用于向所述移动终端发送所述连接请求信息或接收来自于所述移动终端的连接确认信息;控制模块,用于当所述通信模块接收到所述连接确认信息时,生成对所述移动终端的控制信息,所述控制信息被接收时,所述移动终端应用程序被启动或关闭。本发明带关闭后台应用功能的移动终端配套装置能够尽量节省移动终端用电量,延长移动终端的使用