
一种可伸缩移动作业梯子.pdf

永香****能手

1/8

2/8

3/8
4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种可伸缩移动作业梯子.pdf
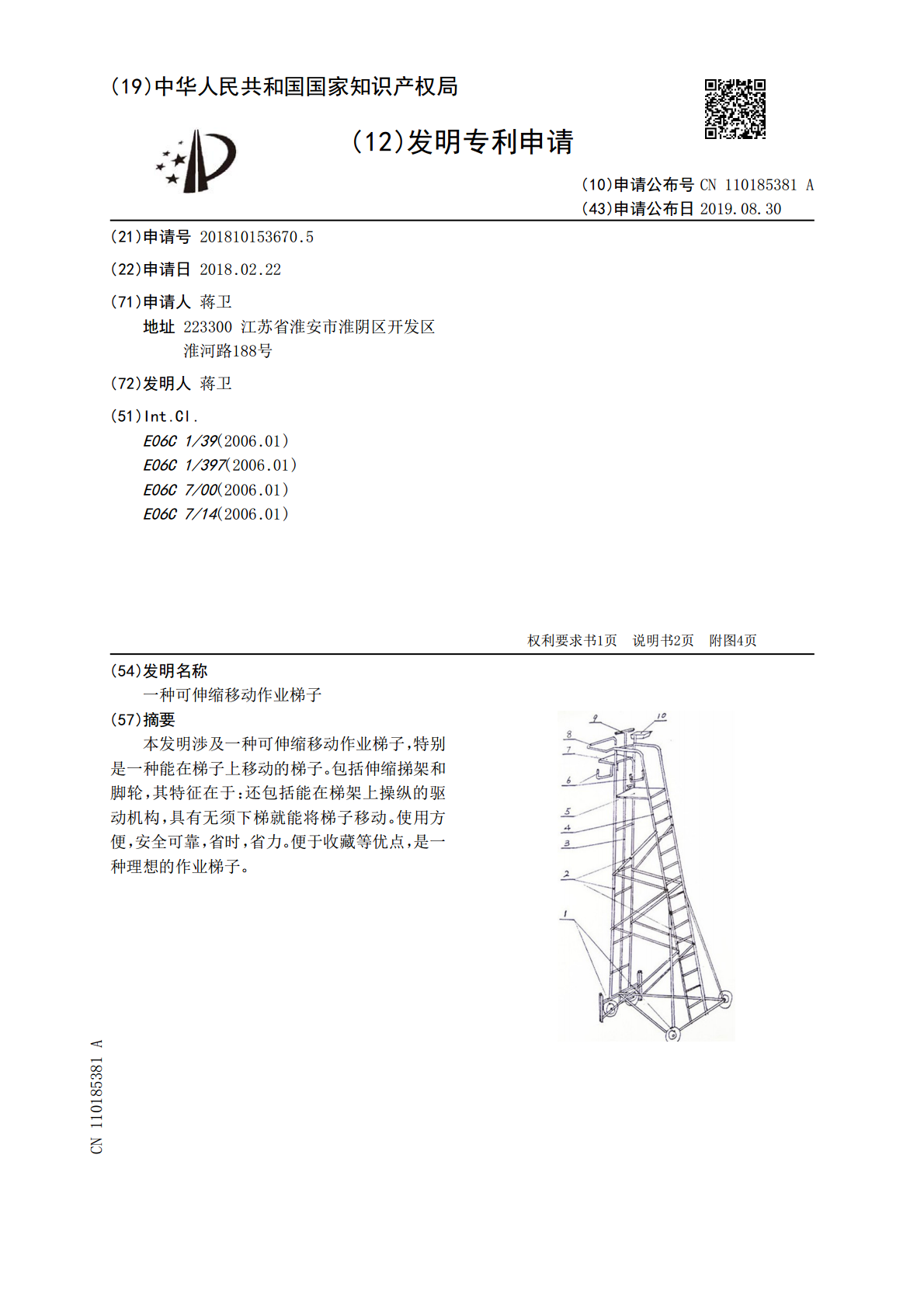
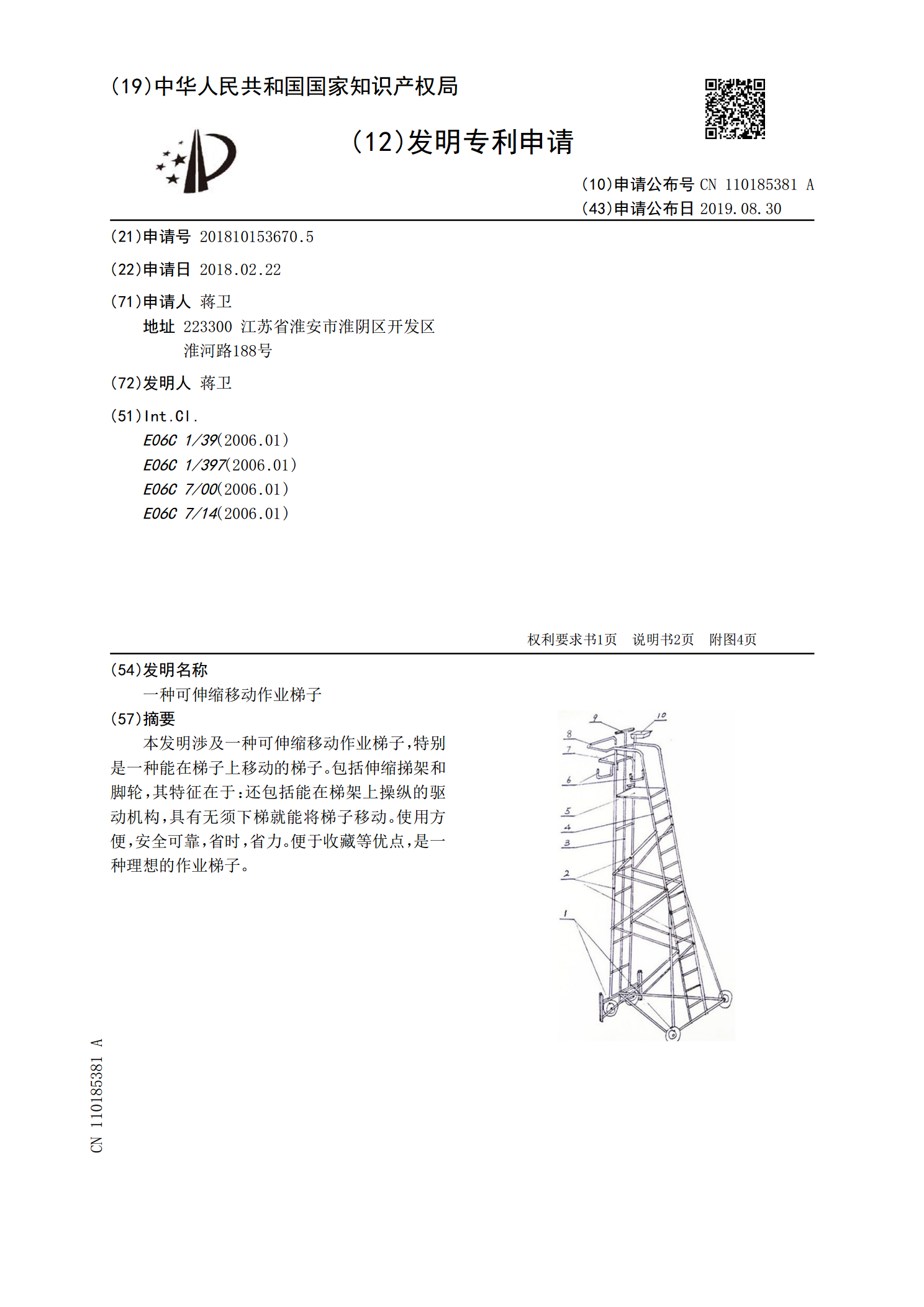
本发明渉及一种可伸缩移动作业梯子,特别是一种能在梯子上移动的梯子。包括伸缩挮架和脚轮,其特征在于:还包括能在梯架上操纵的驱动机构,具有无须下梯就能将梯子移动。使用方便,安全可靠,省时,省力。便于收藏等优点,是一种理想的作业梯子。
一种移动式伸缩梯子.pdf
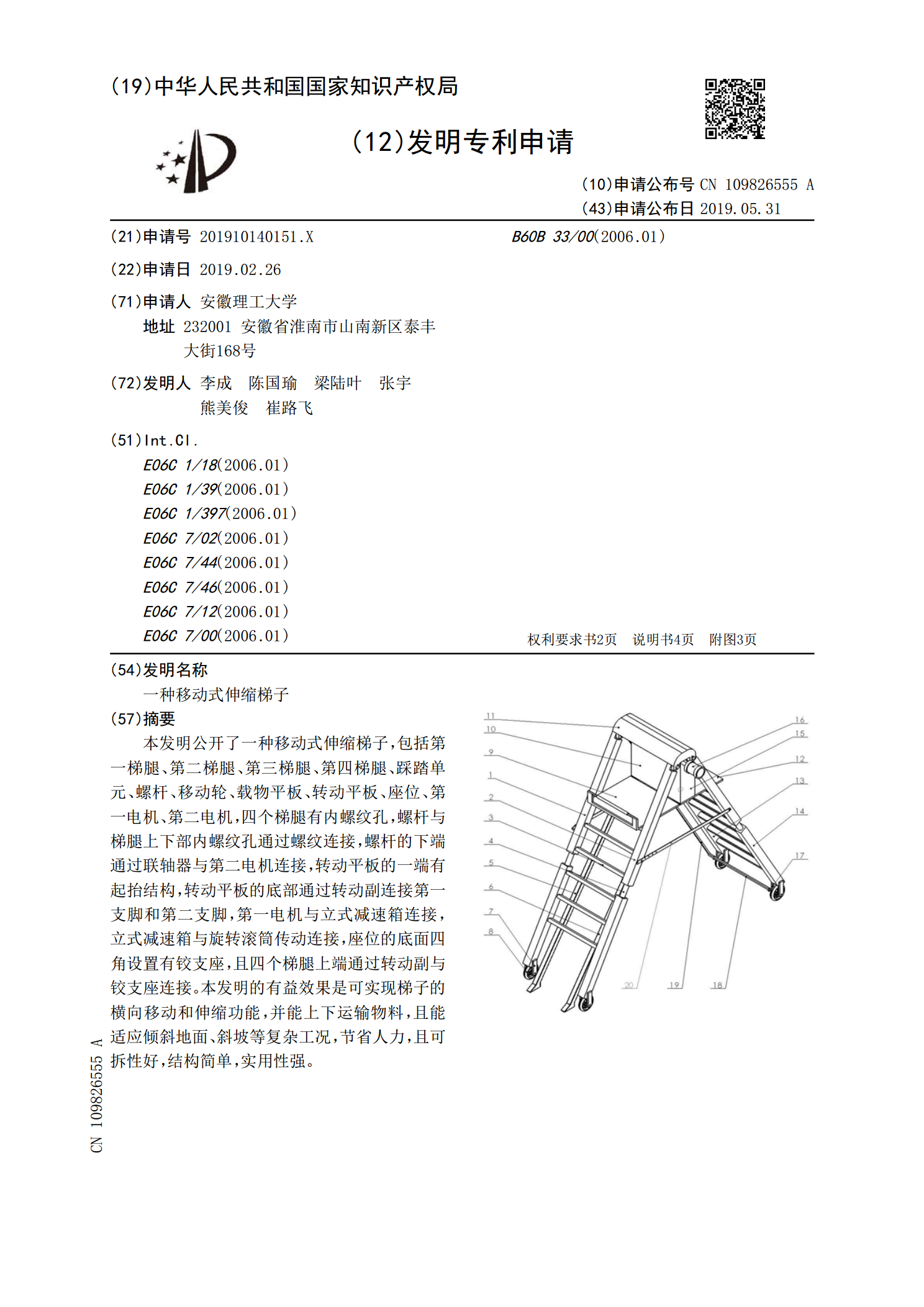
本发明公开了一种移动式伸缩梯子,包括第一梯腿、第二梯腿、第三梯腿、第四梯腿、踩踏单元、螺杆、移动轮、载物平板、转动平板、座位、第一电机、第二电机,四个梯腿有内螺纹孔,螺杆与梯腿上下部内螺纹孔通过螺纹连接,螺杆的下端通过联轴器与第二电机连接,转动平板的一端有起抬结构,转动平板的底部通过转动副连接第一支脚和第二支脚,第一电机与立式减速箱连接,立式减速箱与旋转滚筒传动连接,座位的底面四角设置有铰支座,且四个梯腿上端通过转动副与铰支座连接。本发明的有益效果是可实现梯子的横向移动和伸缩功能,并能上下运输物料,且能适
一种可自行移动的梯子.pdf
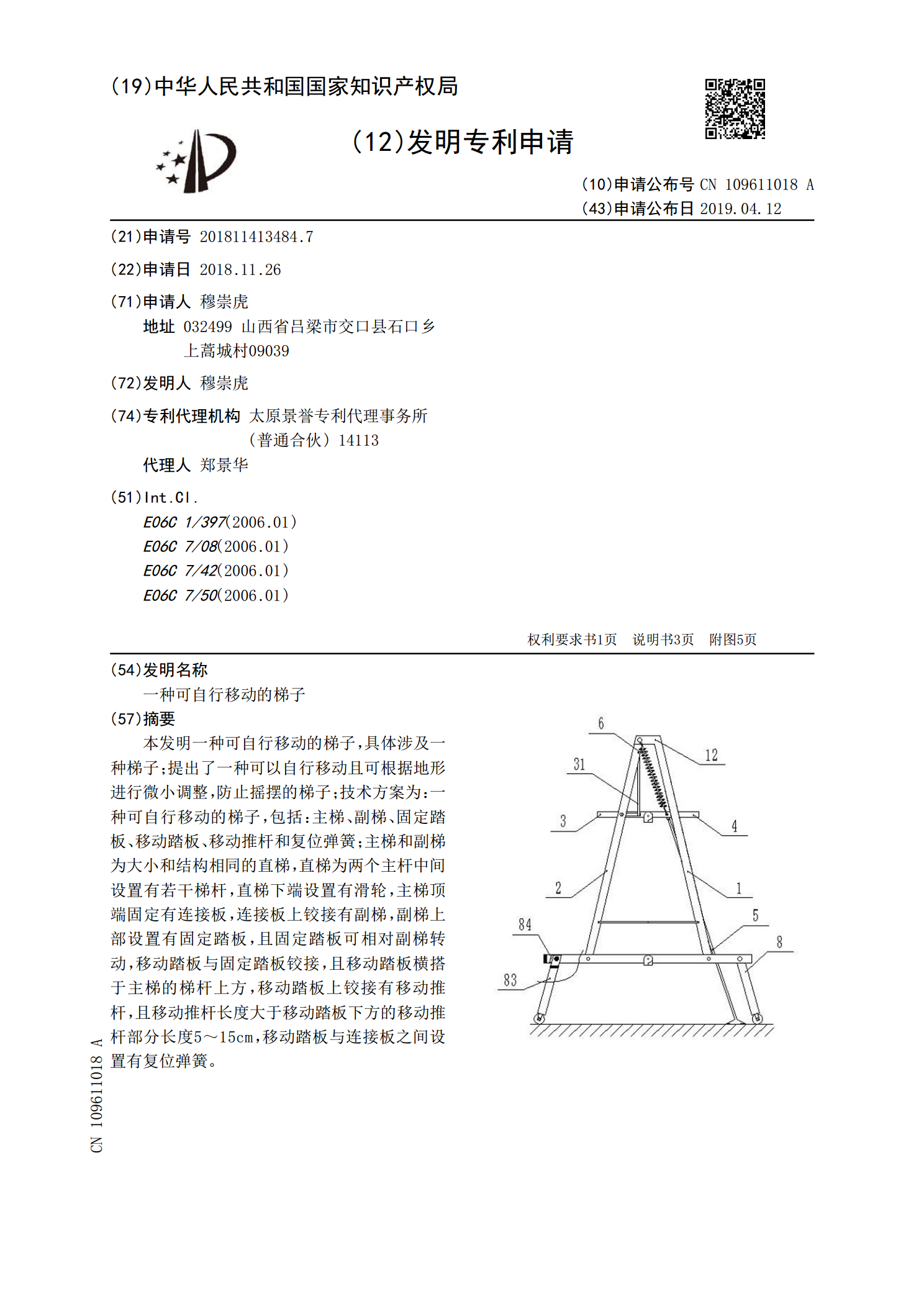
本发明一种可自行移动的梯子,具体涉及一种梯子;提出了一种可以自行移动且可根据地形进行微小调整,防止摇摆的梯子;技术方案为:一种可自行移动的梯子,包括:主梯、副梯、固定踏板、移动踏板、移动推杆和复位弹簧;主梯和副梯为大小和结构相同的直梯,直梯为两个主杆中间设置有若干梯杆,直梯下端设置有滑轮,主梯顶端固定有连接板,连接板上铰接有副梯,副梯上部设置有固定踏板,且固定踏板可相对副梯转动,移动踏板与固定踏板铰接,且移动踏板横搭于主梯的梯杆上方,移动踏板上铰接有移动推杆,且移动推杆长度大于移动踏板下方的移动推杆部分长
一种可自主操控移动的梯子.pdf
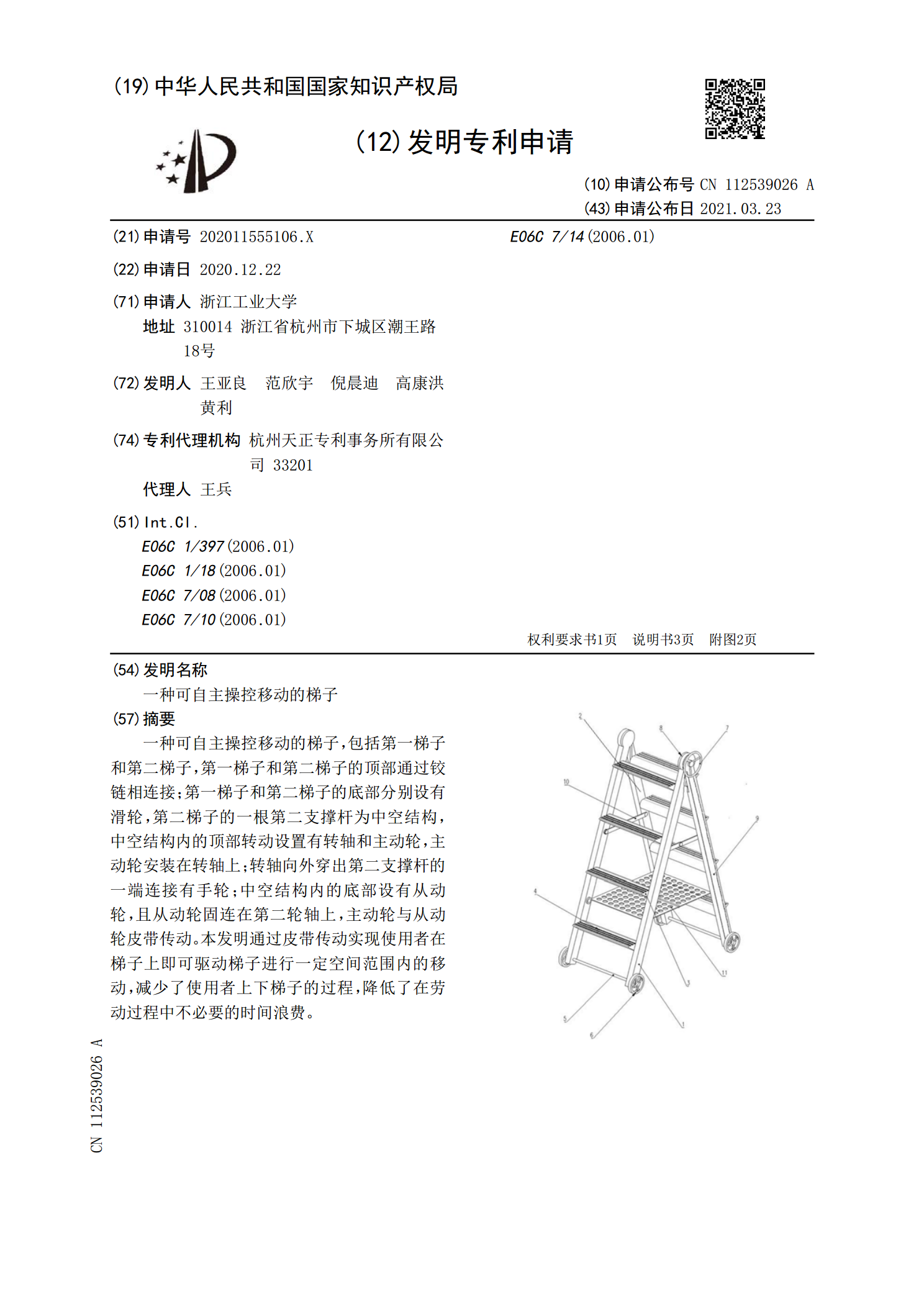
一种可自主操控移动的梯子,包括第一梯子和第二梯子,第一梯子和第二梯子的顶部通过铰链相连接;第一梯子和第二梯子的底部分别设有滑轮,第二梯子的一根第二支撑杆为中空结构,中空结构内的顶部转动设置有转轴和主动轮,主动轮安装在转轴上;转轴向外穿出第二支撑杆的一端连接有手轮;中空结构内的底部设有从动轮,且从动轮固连在第二轮轴上,主动轮与从动轮皮带传动。本发明通过皮带传动实现使用者在梯子上即可驱动梯子进行一定空间范围内的移动,减少了使用者上下梯子的过程,降低了在劳动过程中不必要的时间浪费。

一种可伸缩移动灶台.pdf
本发明公开了一种可伸缩移动灶台,包括活动伸缩组件、吸油烟罩和灶台,活动伸缩组件分为垂直段、水平段和外接出口段,垂直段和水平段均由相互嵌套连接的伸缩套管组成,水平段通过活动套与外接出口段套接,活动套外圆设置有大齿轮与电机驱动的小齿轮相啮合,外接出口段内设有抽气风机,水平段的伸缩套管内置有伸缩驱动机构,垂直段上设置有电动升降装置,电动升降装置包括升降电机、绕线轮、钢丝绳,钢丝绳与垂直段的伸缩套管相连接,伸缩套管垂直段上活动套接有转动套,灶台通过弧形支架固定连接到转动套上。本发明通过自由伸缩旋转的排油烟管实现自