
一种蠕行自适应控制系统及其控制方法.pdf

长春****主a

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种蠕行自适应控制系统及其控制方法.pdf
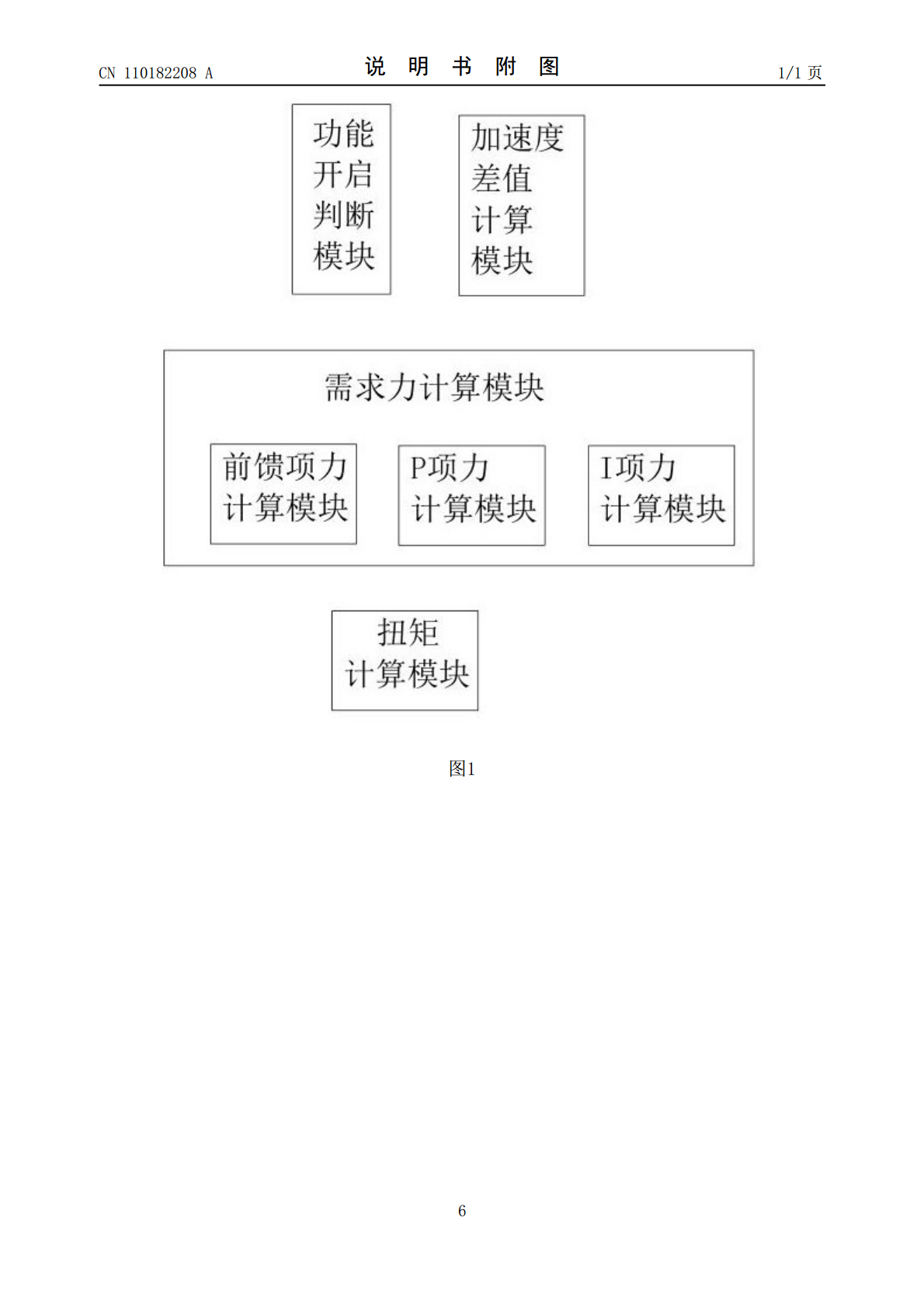
本发明涉及车辆智能控制领域,具体涉及一种蠕行自适应控制方法。本发明的是通过以下技术方案得以实现的:一种蠕行自适应控制系统,包含功能开启判断模块,用于开启蠕行自适应控制系统;加速度差值计算模块,用于根据当前车速来计算出需求加速度;需求力计算模块,包含前馈项力计算模块、P项力计算模块和I项力计算模块;扭矩计算模块,将所述前馈项力计算模块、所述P项力计算模块和所述I项力计算模块三者之和相加,得到需求力总和,根据所述需求力总与轮胎半径值计算得到所需扭矩。本发明的目的是提供一种蠕行自适应控制方法,以加速度为控制目标
一种电动汽车自适应蠕行控制方法.pdf
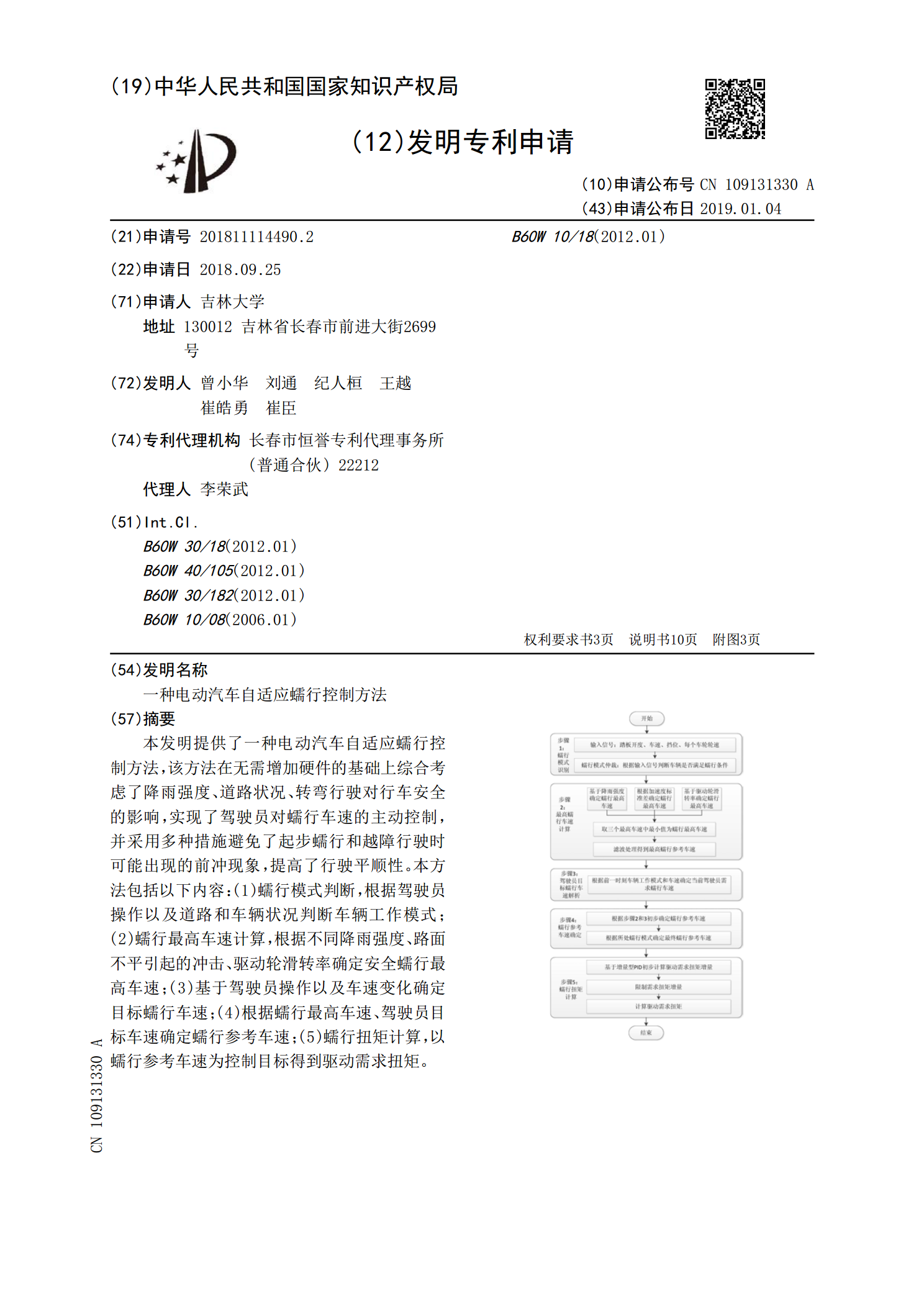
本发明提供了一种电动汽车自适应蠕行控制方法,该方法在无需增加硬件的基础上综合考虑了降雨强度、道路状况、转弯行驶对行车安全的影响,实现了驾驶员对蠕行车速的主动控制,并采用多种措施避免了起步蠕行和越障行驶时可能出现的前冲现象,提高了行驶平顺性。本方法包括以下内容:(1)蠕行模式判断,根据驾驶员操作以及道路和车辆状况判断车辆工作模式;(2)蠕行最高车速计算,根据不同降雨强度、路面不平引起的冲击、驱动轮滑转率确定安全蠕行最高车速;(3)基于驾驶员操作以及车速变化确定目标蠕行车速;(4)根据蠕行最高车速、驾驶员目标

一种灵活自适应电力负荷控制系统及其控制方法.pdf
本发明涉及一种灵活自适应电力负荷控制系统及其控制方法,所述系统由需求响应中心依次通过二级采集控制设备、一级采集控制设备连接到用户用电设备,同时通过云端设备和互联网在需求响应中心与各类用户终端设备之间建立联系和反馈,且用户对自己的设备保留控制能力。其控制方法为,根据电力需求、用户设备情况、用户意愿等,灵活采用基于电价、基于激励机制、全自动、全人工等各种控制方案。本发明提供一种支持多种需求响应模式的自适应控制系统架构,其灵活度高且便于扩展,有助于需求响应系统的实现、增强系统稳定性。

一种冷库门语音提醒自适应控制系统及其控制方法.pdf
本发明提供一种冷库门语音提醒自适应控制系统,包括发声装置,所述发生装置的输入端为语音装置,所述语音装置的输入端为控制面板和分析装置,所述控制面板的输出端为分析装置,所述分析装置的输入端为录入装置和计时器,所述分析装置和数据库互为输入输出端,所述录入装置的输入端为扫描装置,本发明中通过控制系统能有效的管理冷库内部的货物,使冷库内部的货物能更加合理的进行分配,使先入库的货物能被提前取出,减少货物在冷库内部的停留时间,从而保证货物的新鲜程度,同时根据货物的种类不同,提醒使用者货物的最后期限,使货物能被取出,避免
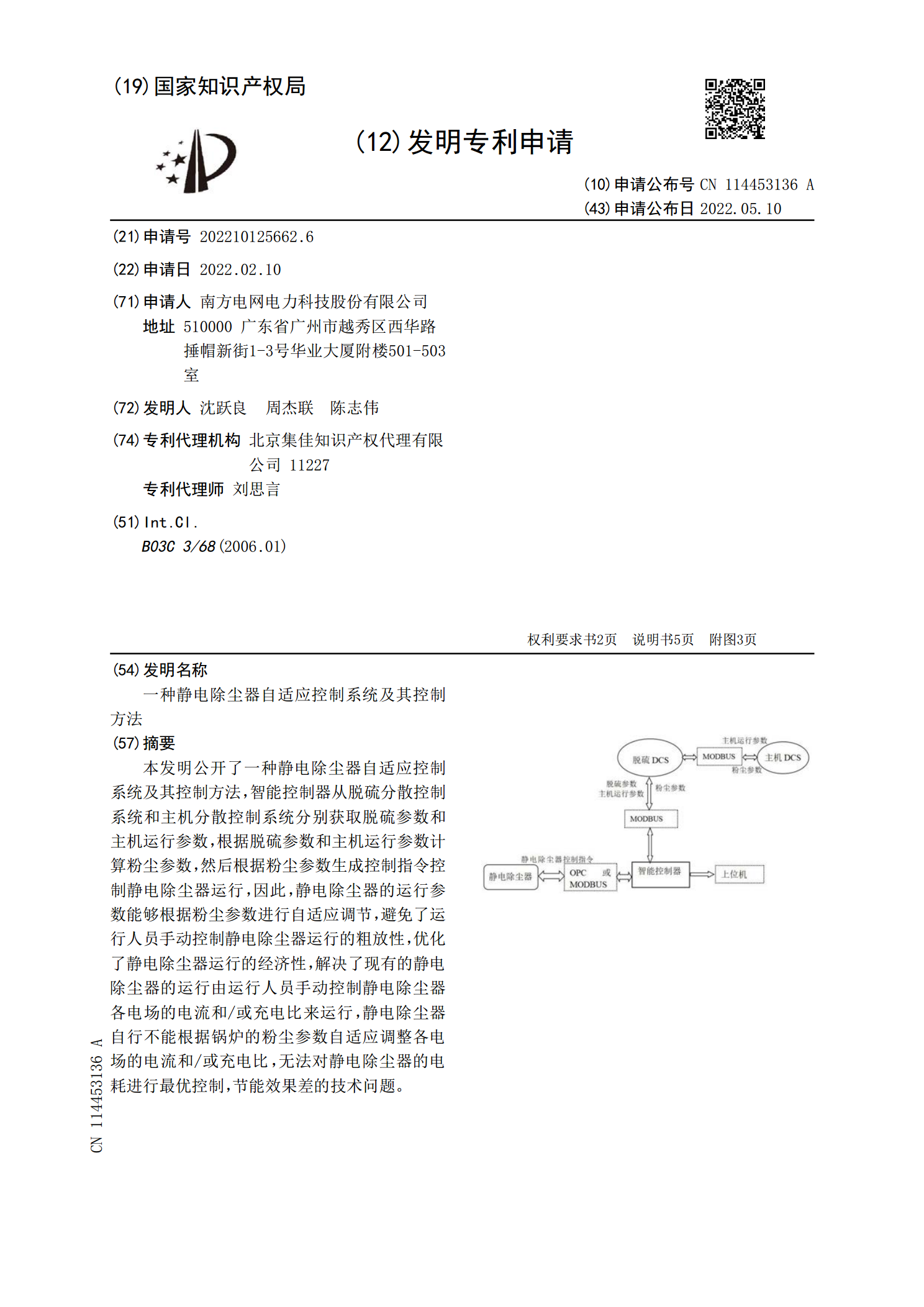
一种静电除尘器自适应控制系统及其控制方法.pdf
本发明公开了一种静电除尘器自适应控制系统及其控制方法,智能控制器从脱硫分散控制系统和主机分散控制系统分别获取脱硫参数和主机运行参数,根据脱硫参数和主机运行参数计算粉尘参数,然后根据粉尘参数生成控制指令控制静电除尘器运行,因此,静电除尘器的运行参数能够根据粉尘参数进行自适应调节,避免了运行人员手动控制静电除尘器运行的粗放性,优化了静电除尘器运行的经济性,解决了现有的静电除尘器的运行由运行人员手动控制静电除尘器各电场的电流和/或充电比来运行,静电除尘器自行不能根据锅炉的粉尘参数自适应调整各电场的电流和/或充电