
一种电动健腹轮.pdf

Th****84

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种电动健腹轮.pdf
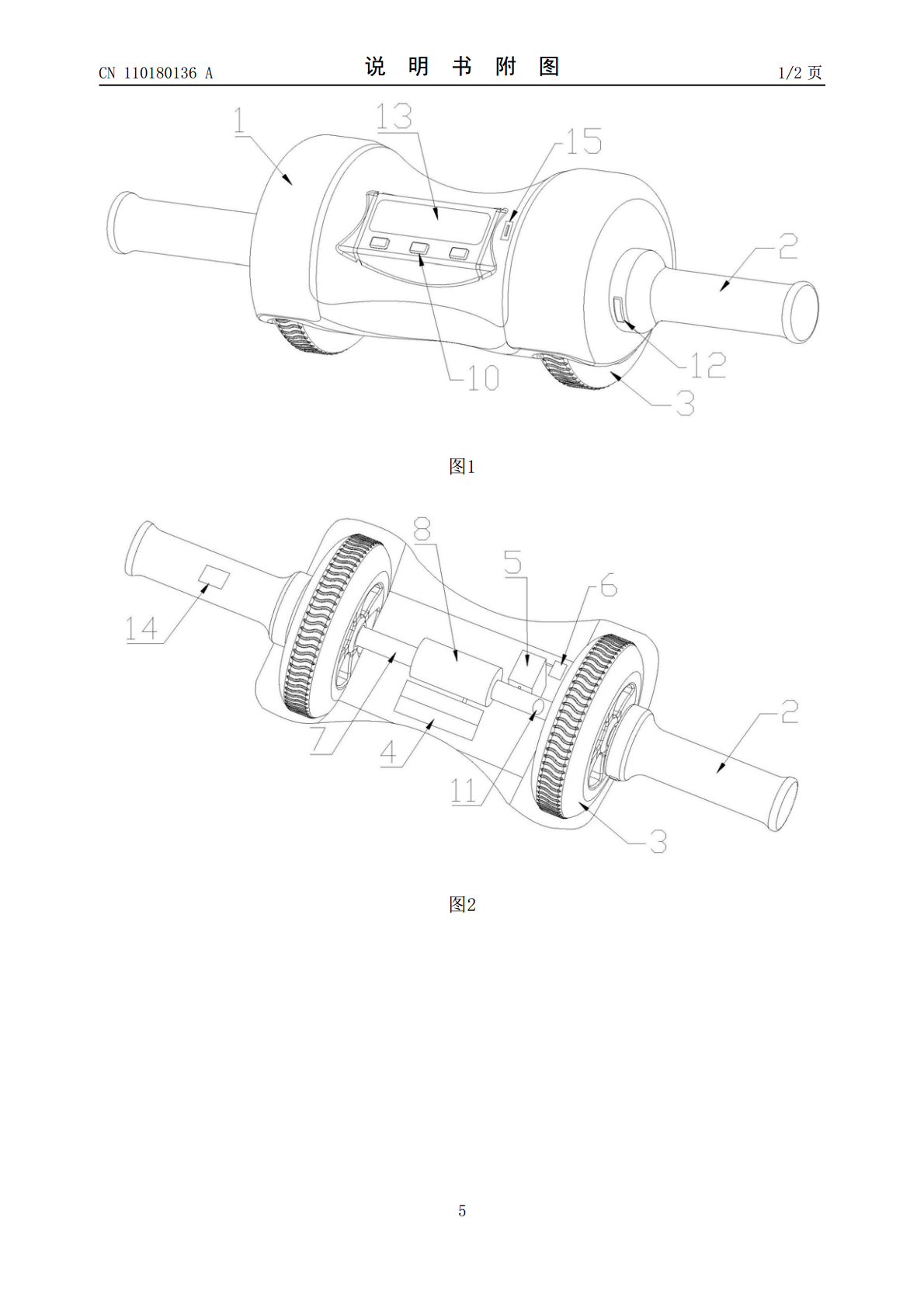
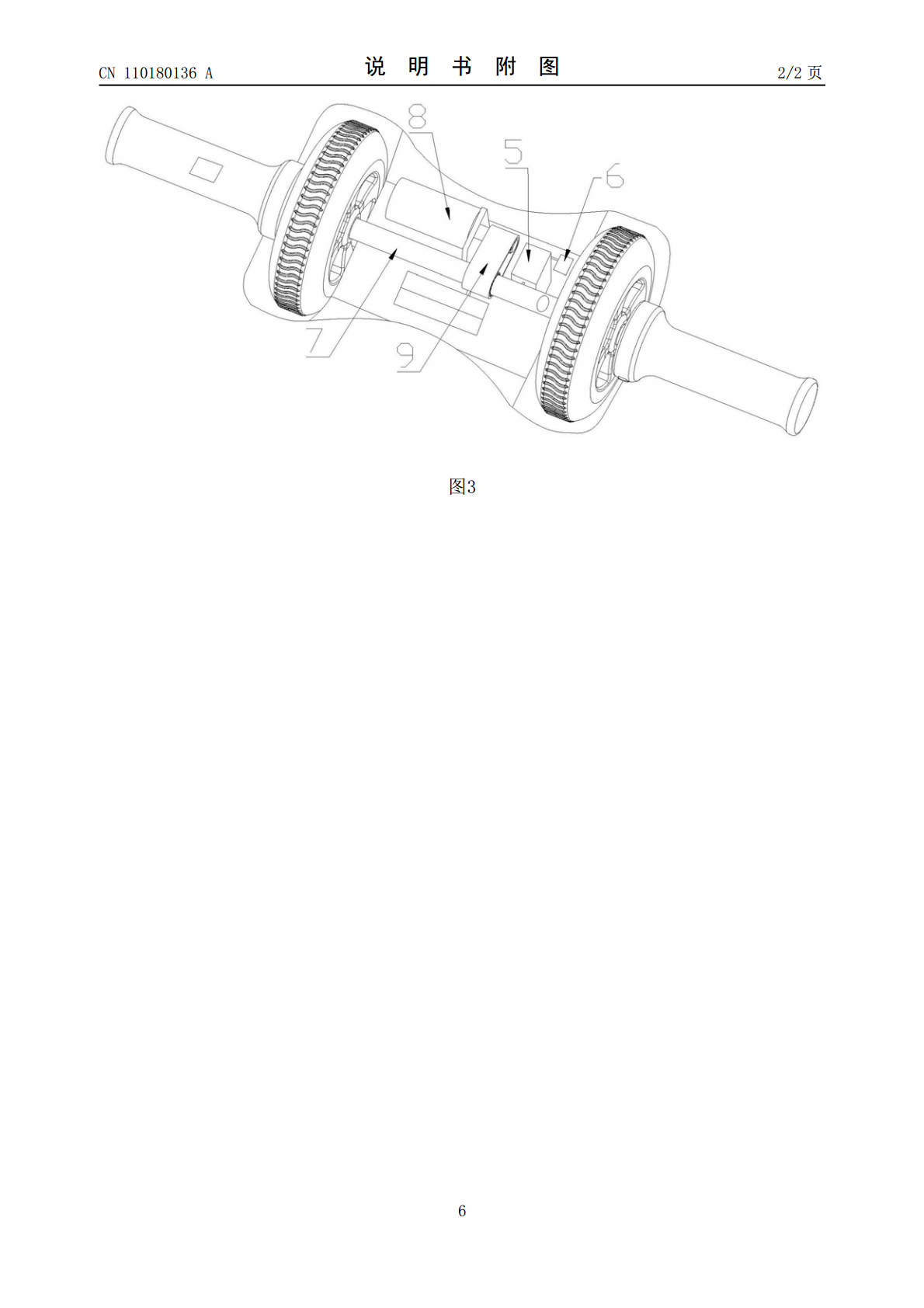
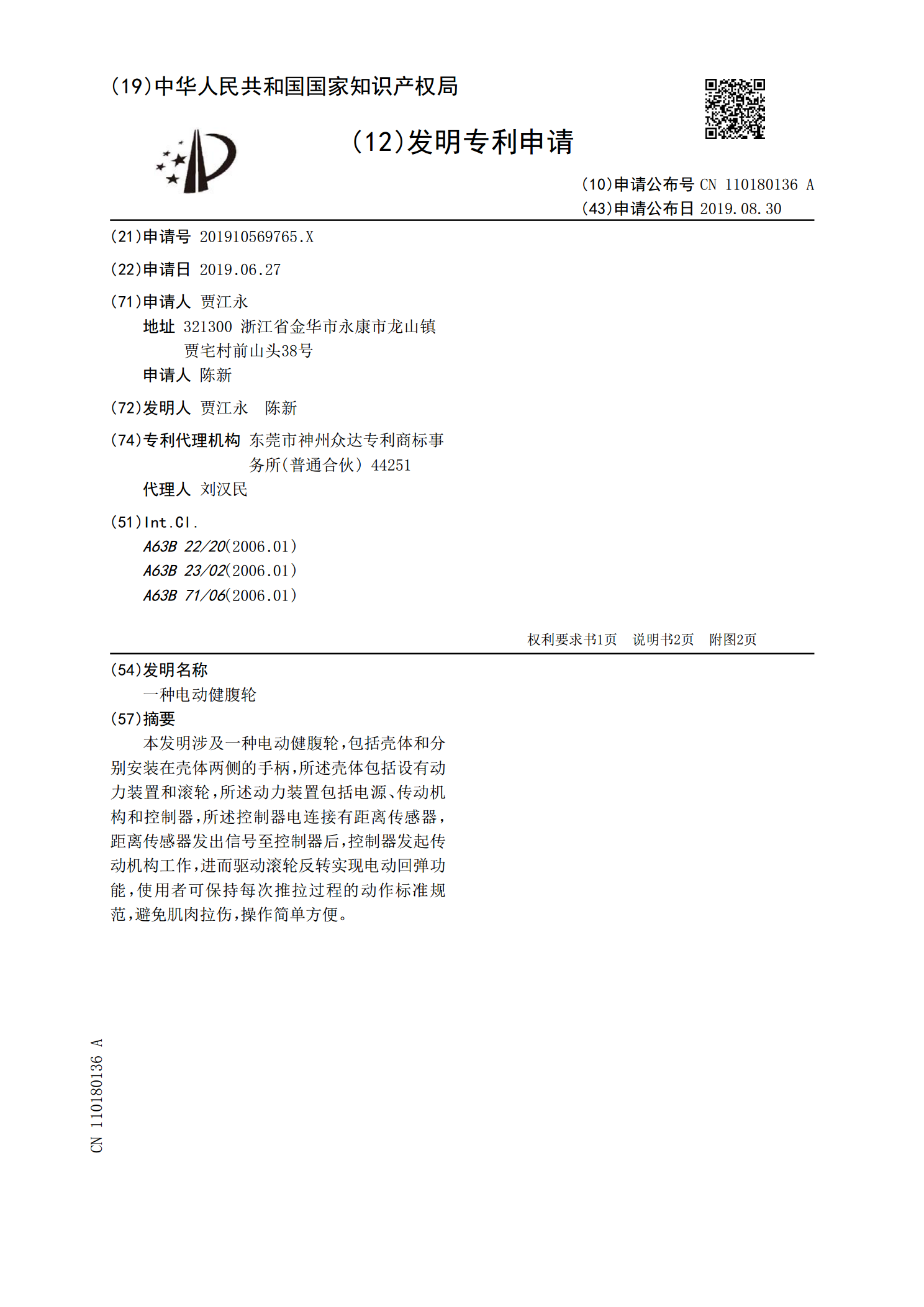
本发明涉及一种电动健腹轮,包括壳体和分别安装在壳体两侧的手柄,所述壳体包括设有动力装置和滚轮,所述动力装置包括电源、传动机构和控制器,所述控制器电连接有距离传感器,距离传感器发出信号至控制器后,控制器发起传动机构工作,进而驱动滚轮反转实现电动回弹功能,使用者可保持每次推拉过程的动作标准规范,避免肌肉拉伤,操作简单方便。
一种健腹轮.pdf
本发明提供一种健腹轮。该健腹轮包括轮轴、轮体、行程限位装置和阻力装置,行程限位装置和阻力装置设在轮轴上同时由轮体包裹,上述转动轮轴后轮体能够跟着转动,上述行程限位装置包括限位套与导向套,限位套与轮轴固定,限位套的外壁上设有螺旋轨迹槽,导向套设有中心通孔,导向套的中心通孔内壁上延伸有两个相对且插接在螺旋轨迹槽内的导向块,导向块能够沿着螺旋轨迹槽移动,所述导向块与轮体固定,且由轮体带动转动,上述阻力装置在现有节后基础上曾设卷簧固定套,卷簧的内端固定在卷簧固定套的弧形卡接块上,可有效防止在卷簧被拉伸到最大行程时
一种健腹轮.pdf
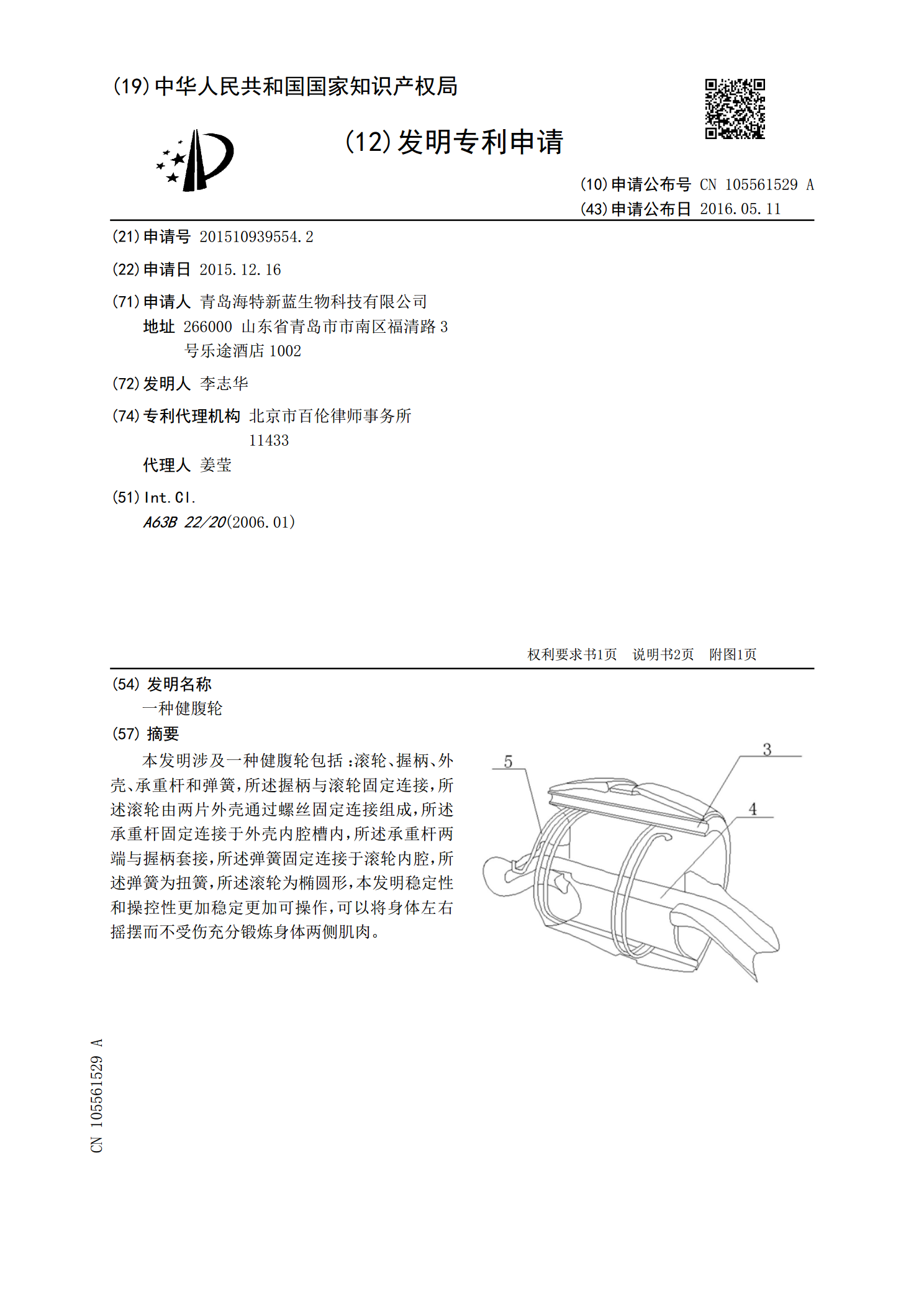
本发明涉及一种健腹轮包括:滚轮、握柄、外壳、承重杆和弹簧,所述握柄与滚轮固定连接,所述滚轮由两片外壳通过螺丝固定连接组成,所述承重杆固定连接于外壳内腔槽内,所述承重杆两端与握柄套接,所述弹簧固定连接于滚轮内腔,所述弹簧为扭簧,所述滚轮为椭圆形,本发明稳定性和操控性更加稳定更加可操作,可以将身体左右摇摆而不受伤充分锻炼身体两侧肌肉。
一种健腹轮.pdf
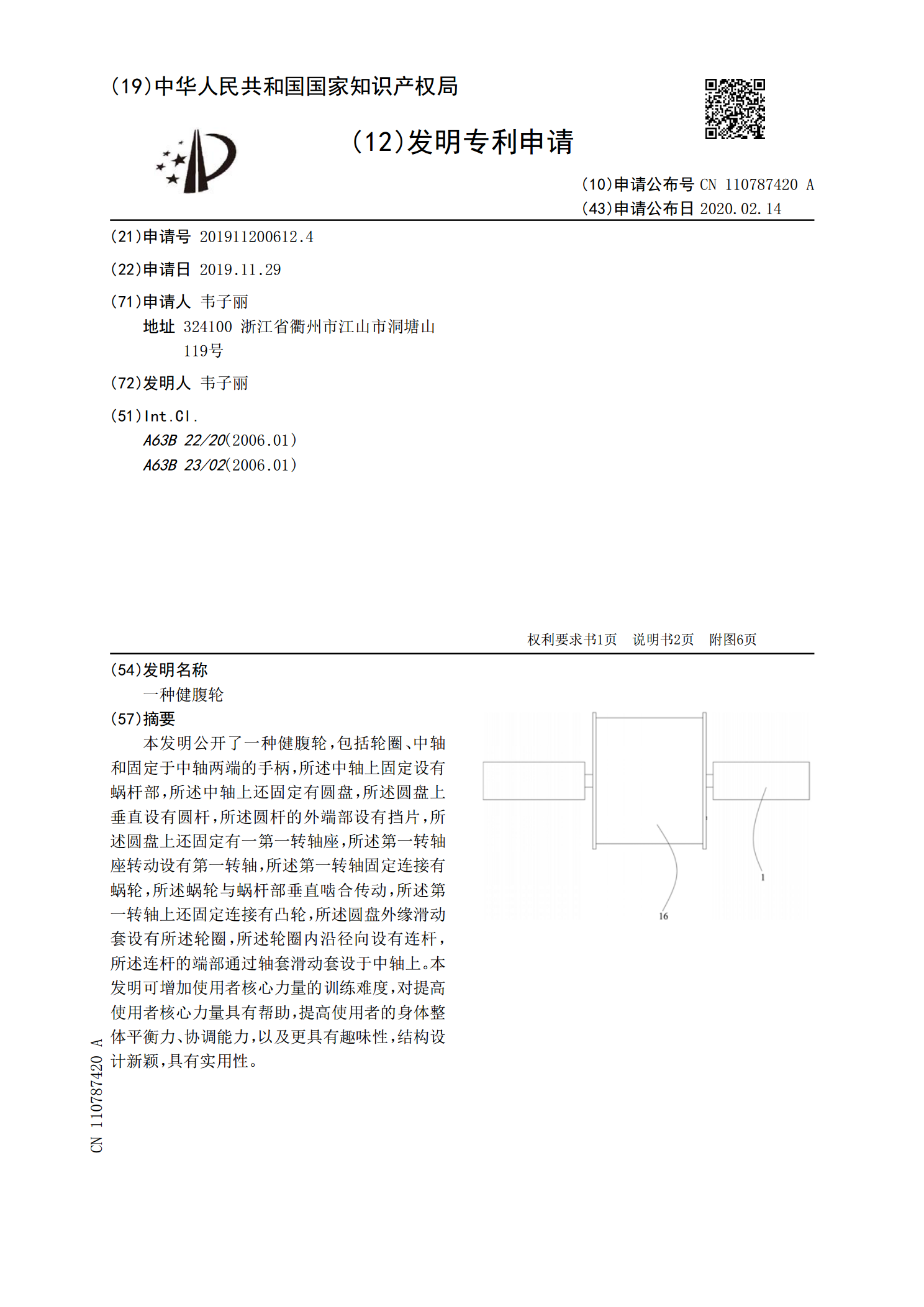
本发明公开了一种健腹轮,包括轮圈、中轴和固定于中轴两端的手柄,所述中轴上固定设有蜗杆部,所述中轴上还固定有圆盘,所述圆盘上垂直设有圆杆,所述圆杆的外端部设有挡片,所述圆盘上还固定有一第一转轴座,所述第一转轴座转动设有第一转轴,所述第一转轴固定连接有蜗轮,所述蜗轮与蜗杆部垂直啮合传动,所述第一转轴上还固定连接有凸轮,所述圆盘外缘滑动套设有所述轮圈,所述轮圈内沿径向设有连杆,所述连杆的端部通过轴套滑动套设于中轴上。本发明可增加使用者核心力量的训练难度,对提高使用者核心力量具有帮助,提高使用者的身体整体平衡力、
一种健腹轮.pdf
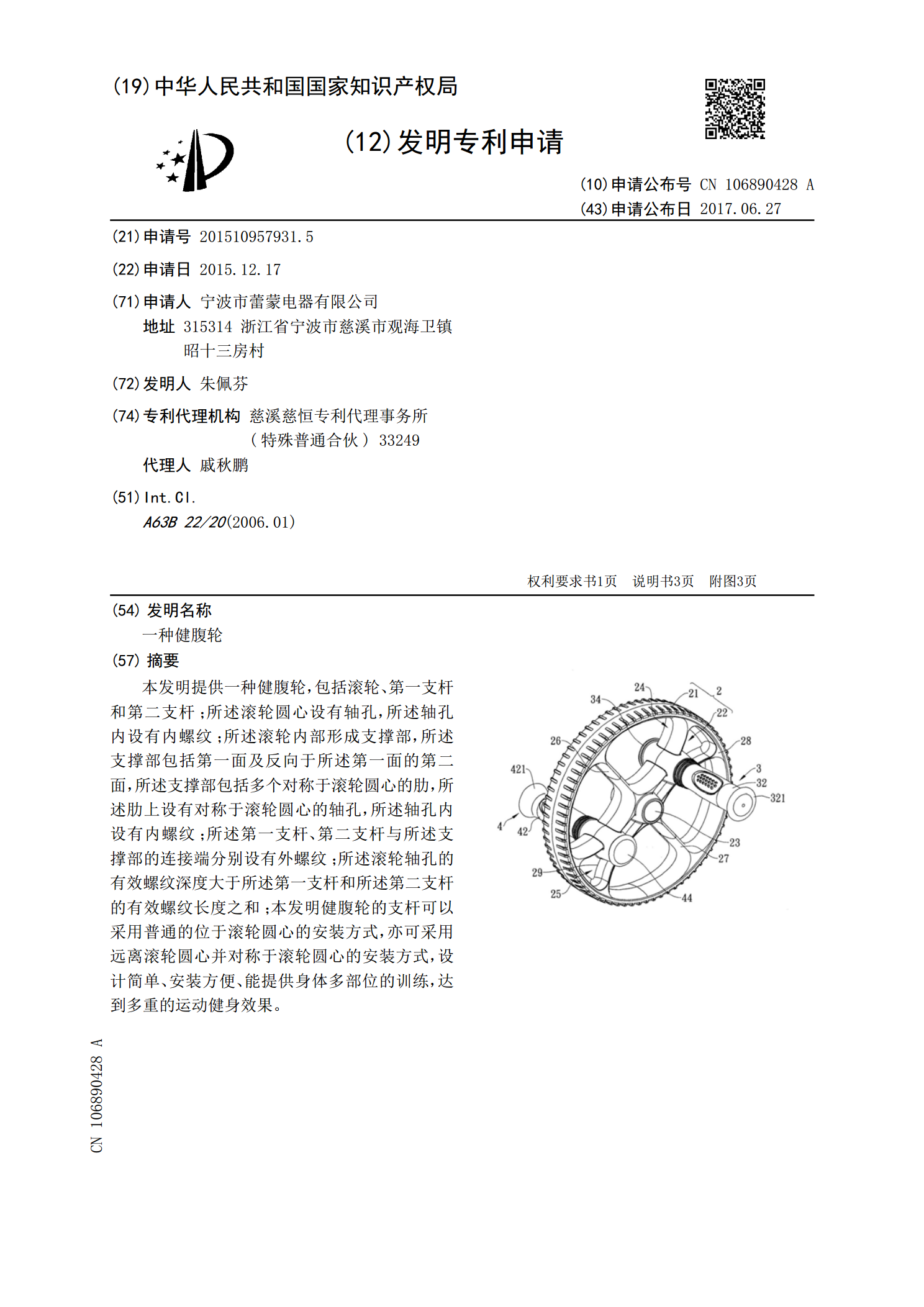
本发明提供一种健腹轮,包括滚轮、第一支杆和第二支杆;所述滚轮圆心设有轴孔,所述轴孔内设有内螺纹;所述滚轮内部形成支撑部,所述支撑部包括第一面及反向于所述第一面的第二面,所述支撑部包括多个对称于滚轮圆心的肋,所述肋上设有对称于滚轮圆心的轴孔,所述轴孔内设有内螺纹;所述第一支杆、第二支杆与所述支撑部的连接端分别设有外螺纹;所述滚轮轴孔的有效螺纹深度大于所述第一支杆和所述第二支杆的有效螺纹长度之和;本发明健腹轮的支杆可以采用普通的位于滚轮圆心的安装方式,亦可采用远离滚轮圆心并对称于滚轮圆心的安装方式,设计简单、