
转子不平衡量测试.pptx

骑着****猪猪


1/10

2/10

3/10

4/10
5/10
6/10
7/10

8/10
9/10

10/10
亲,该文档总共94页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

转子不平衡量测试.pptx
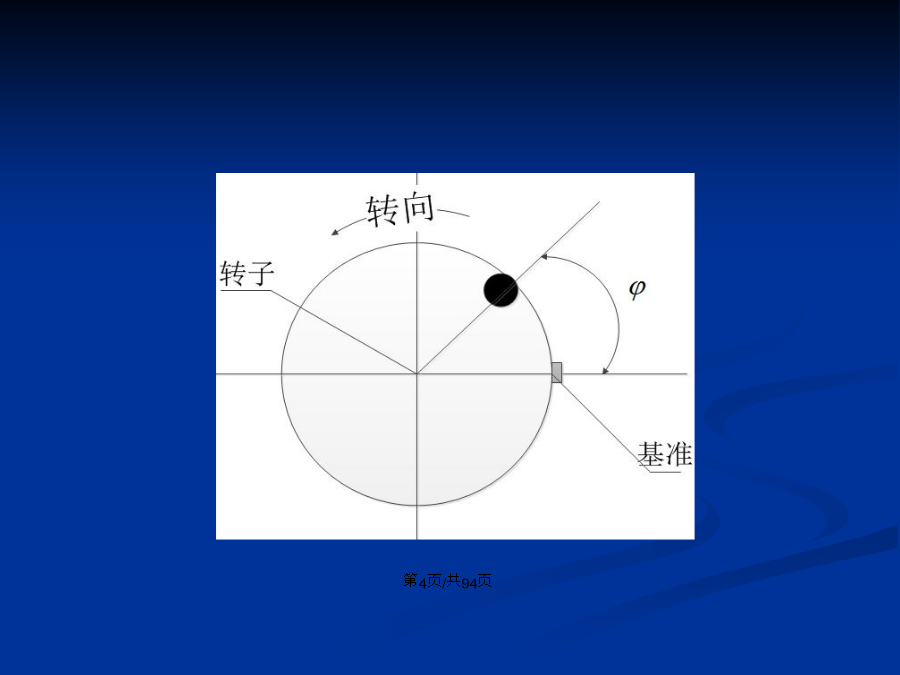
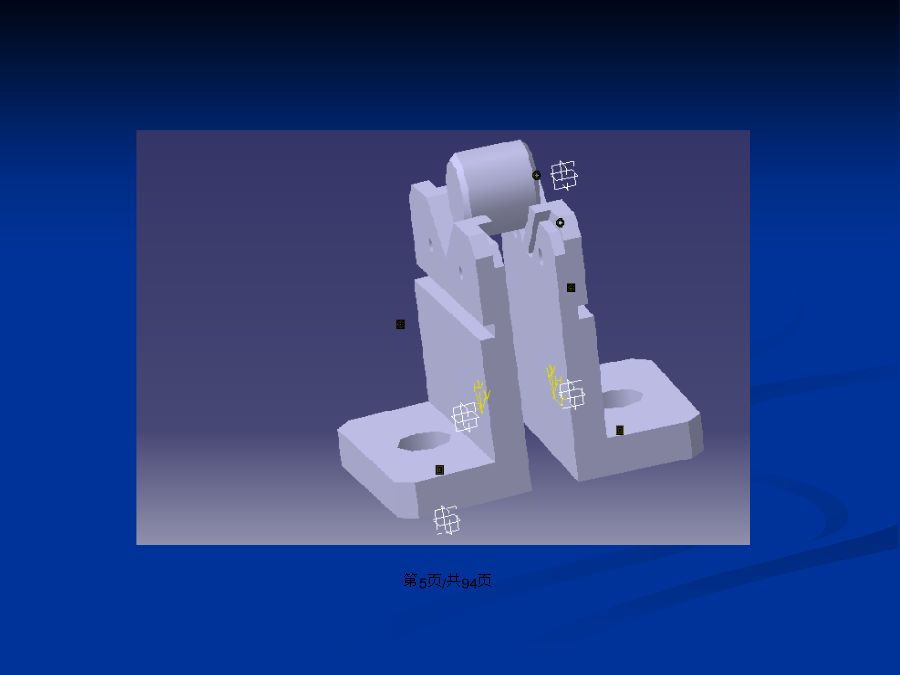
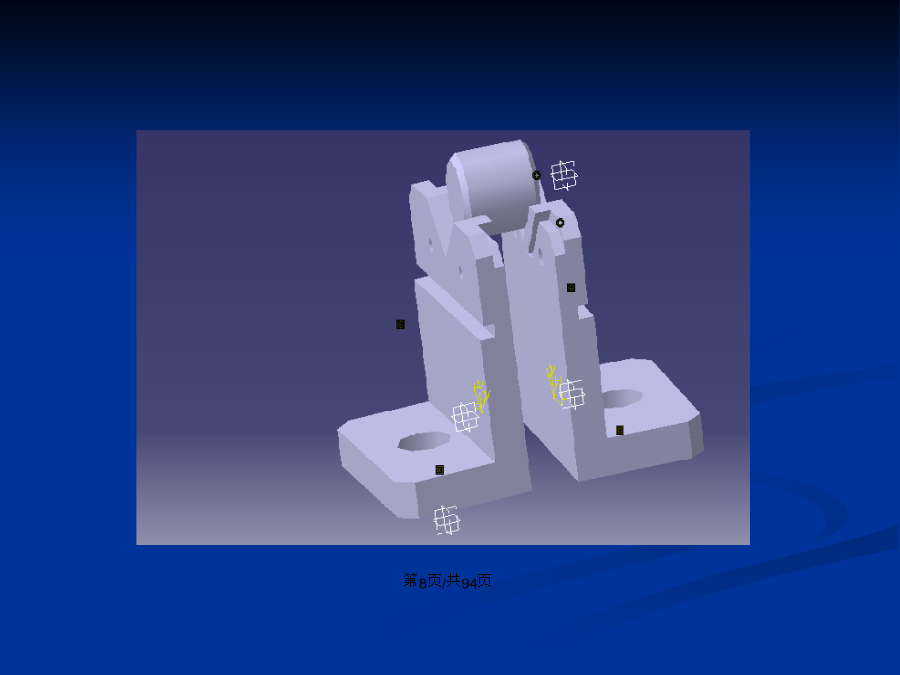
会计学刚性转子不平衡量测试被测轴承转子(2)主要任务:测转子不平衡量。测量转子的不平衡量即测量不平衡引起的振动。用传感器测得振动信号后,然后对振动信号进行处理,最终得到振动的幅值、相位。/2,该测试系统的整体测试过程。1伺服电机。2转子。3弹簧片。4振动信号传感器11是光电传感器及反光片。5振动信号处理电路。7基准信号处理电路。8模数转换。9DFT算法。10转子不平衡量及相位显示。待测转子放在测力支承上,当交流伺服电机通过皮带摩擦驱动,带动转子作恒速转动时,转子不平衡量产生的离心力经过测力支承传递懂到力传

转子不平衡量测试1.ppt
题目:刚性转子不平衡量的测试整体架构刚性转子不平衡量测试被测轴承转子(2)主要任务:测转子不平衡量。测量转子的不平衡量即测量不平衡引起的振动。用传感器测得振动信号后,然后对振动信号进行处理,最终得到振动的幅值、相位。2,该测试系统的整体测试过程。1伺服电机。2转子。3弹簧片。4振动信号传感器11是光电传感器及反光片。5振动信号处理电路。7基准信号处理电路。8模数转换。9DFT算法。10转子不平衡量及相位显示。待测转子放在测力支承上,当交流伺服电机通过皮带摩擦驱动,带动转子作恒速转动时,转子不平衡量产生的离

微速差双转子不平衡量识别法研究.docx
微速差双转子不平衡量识别法研究摘要:双转子微速差系统在飞行过程中,由于各种原因造成的不平衡量会引起系统的振动和噪声,甚至会危及系统安全稳定。因此,针对微速差双转子系统中不平衡量的识别问题,本文提出了一种新的识别方法。该方法基于功率谱分析和小波变换,具有较高的准确性和实用性。关键词:微速差;双转子;不平衡量;功率谱分析;小波变换;识别方法1.前言微速差双转子系统是飞行器中常用的一种机构,它的结构简单、功率密度大、扭矩平稳等特点使它成为飞行器的重要部件。然而,在双转子微速差系统中,由于各种因素的作用,例如过热

基于稳健回归分析的转子系统不平衡量识别.docx
基于稳健回归分析的转子系统不平衡量识别摘要:本文基于稳健回归分析方法,针对转子系统不平衡量的识别问题进行研究。首先,通过分析不平衡情况下转子系统的工作状态,提出不平衡量的定义与计算方法。然后,利用稳健回归分析方法对转子系统不平衡量进行识别,得到不平衡量与转子运动状态之间的关系。最后,利用实测数据进行实验验证,结果表明本文所提出的稳健回归分析方法能够有效识别转子系统的不平衡量,具有一定的实用价值。关键词:转子系统,不平衡量,稳健回归分析正文:一、引言转子系统是工业生产中常用的旋转机械设备之一,其工作性能对生

一种APU转子组件不平衡量的控制方法.pdf
本发明公开了一种APU转子组件不平衡量的控制方法,所述APU转子组件采用单键齿轴承轴,所述控制方法包括对所述轴承轴进行单独平衡的步骤,具体:将所述轴承轴去重,置于平衡机的两支撑点上,两支撑点分别靠近所述轴承轴的两端支撑,使所述轴承轴的重心位于两支撑点之间,然后依靠平衡机采用双点支撑,中间圈带带转的方式,对所述轴承轴的静不平衡量进行测量调整。本发明研究了一种针对单键齿轴不平衡量的测量方法,使单键齿轴的不平衡量的测量从不可能变成可能,从而在转子组件整体平衡之前,先对其轴承轴进行单独平衡,通过限制轴承轴的不平衡