
基于区域定位的实时相位测量轮廓术.pdf

书錦****by

1/9
2/9
3/9
4/9
5/9
6/9
7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于区域定位的实时相位测量轮廓术.pdf
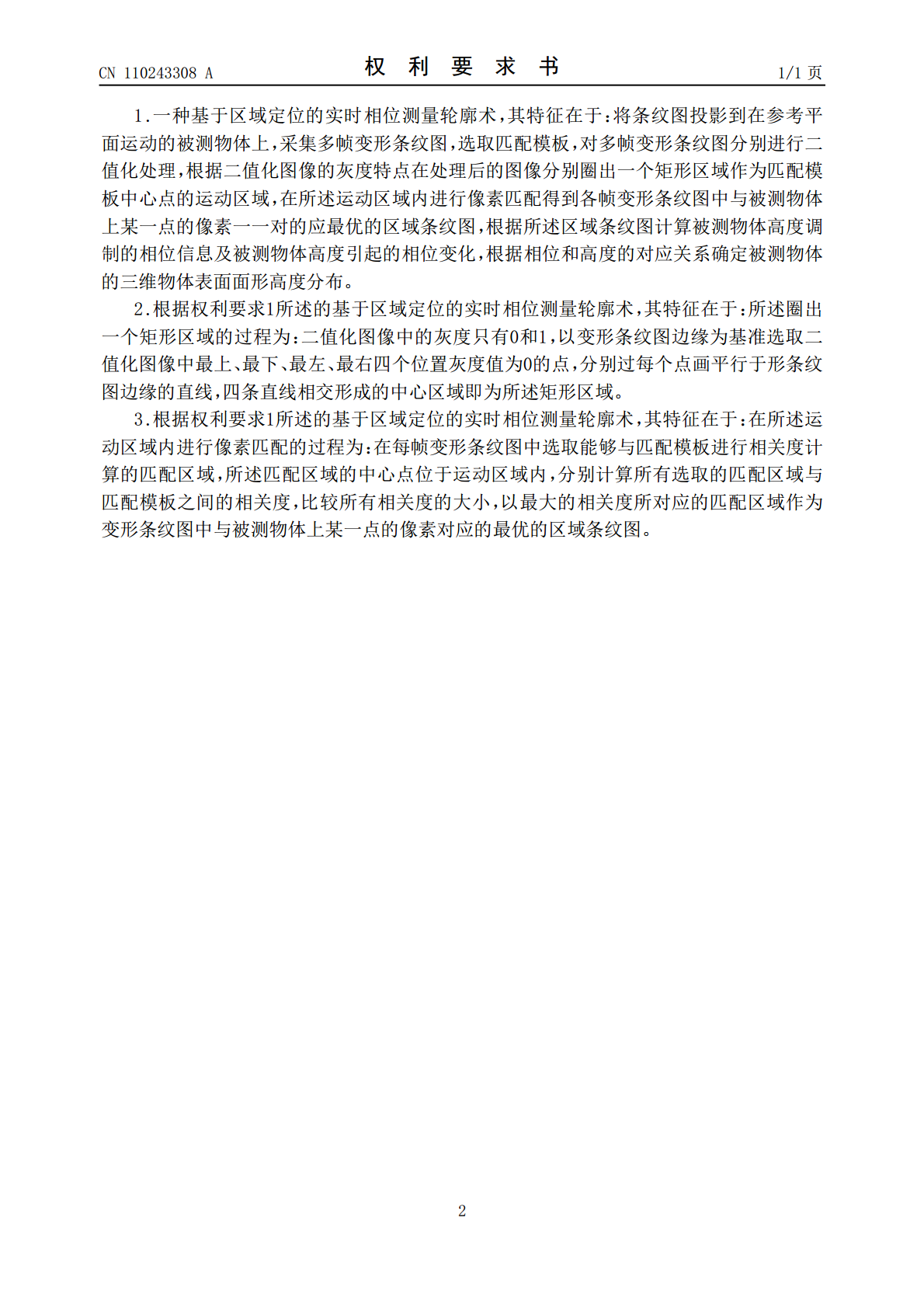
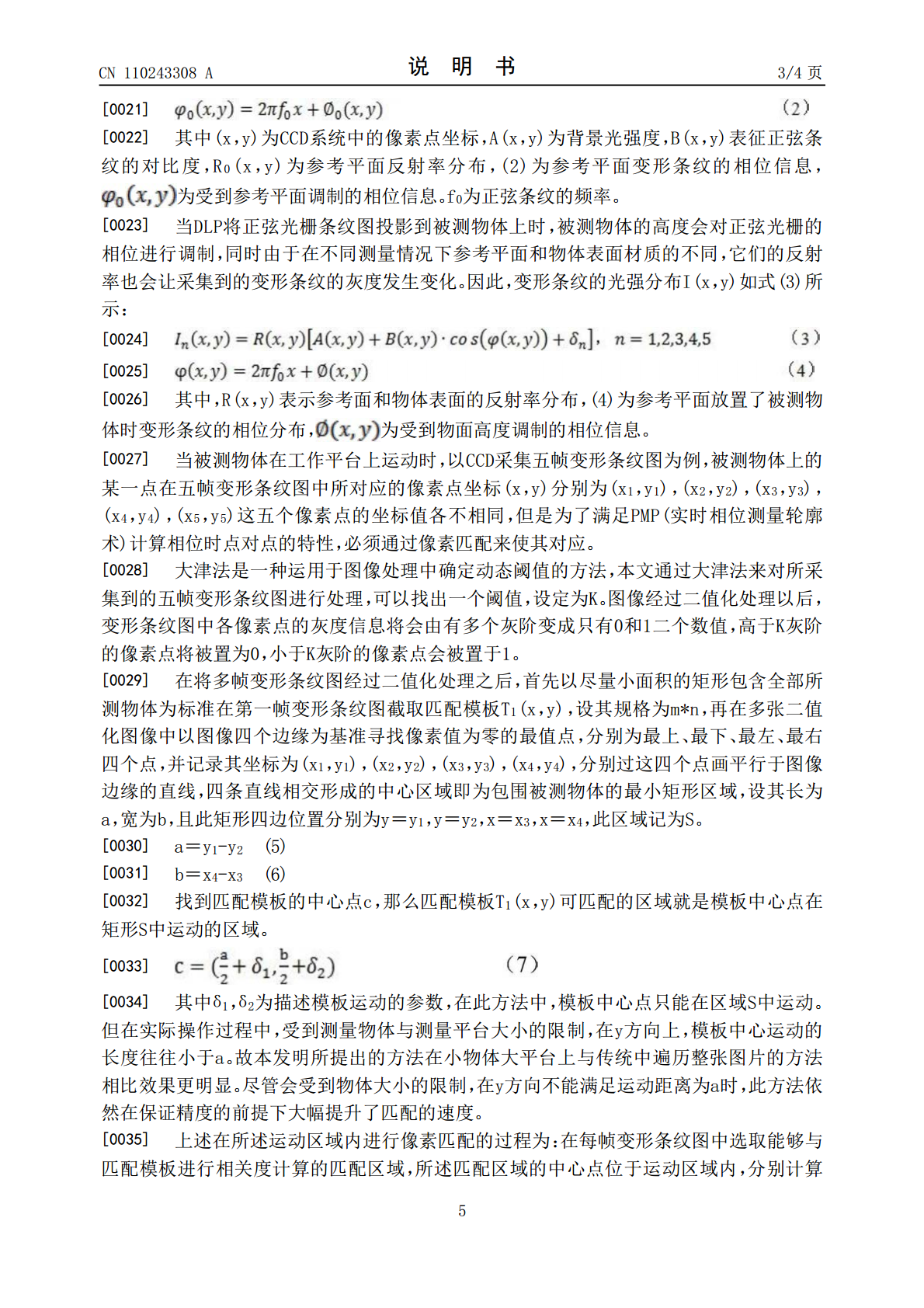
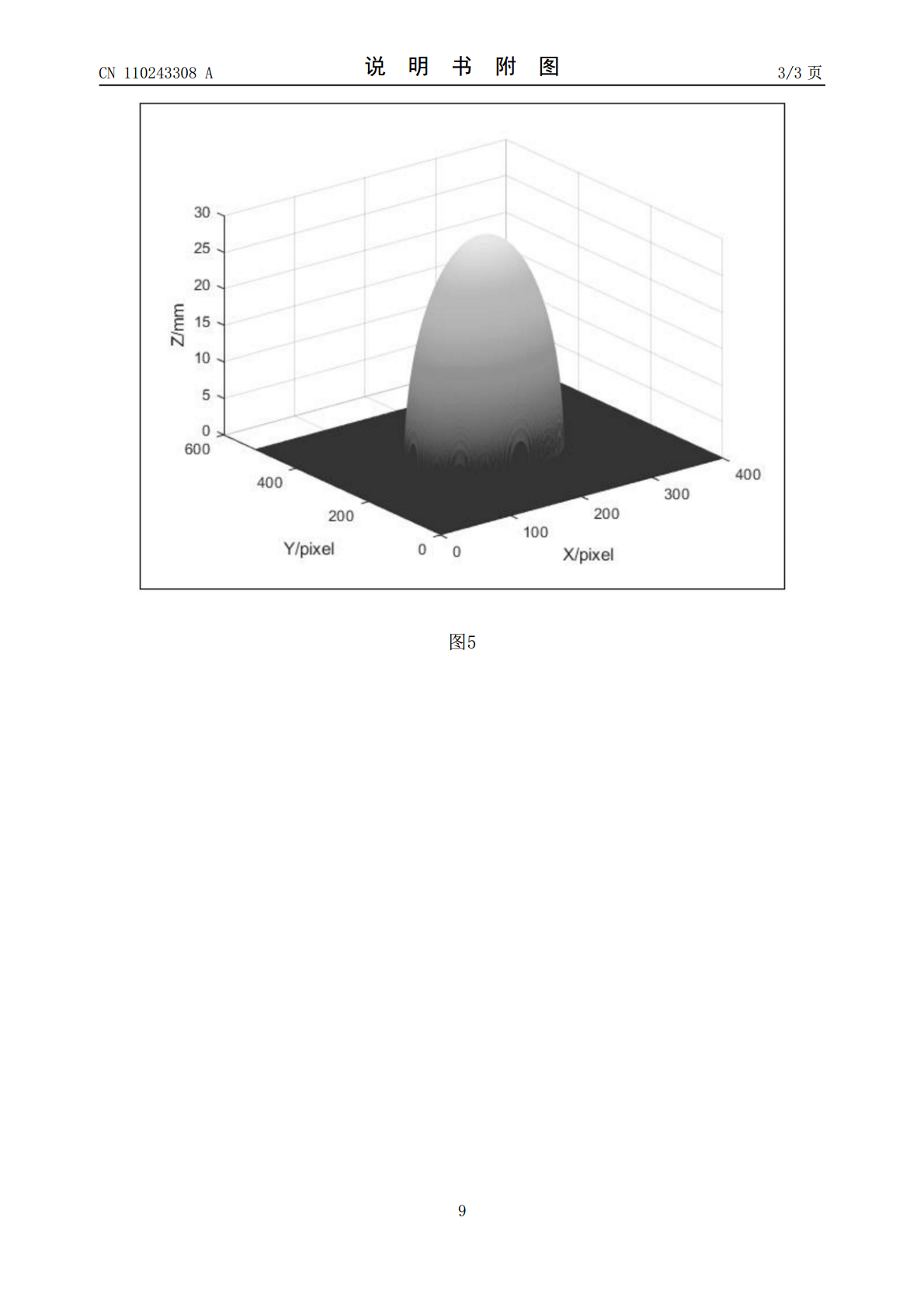
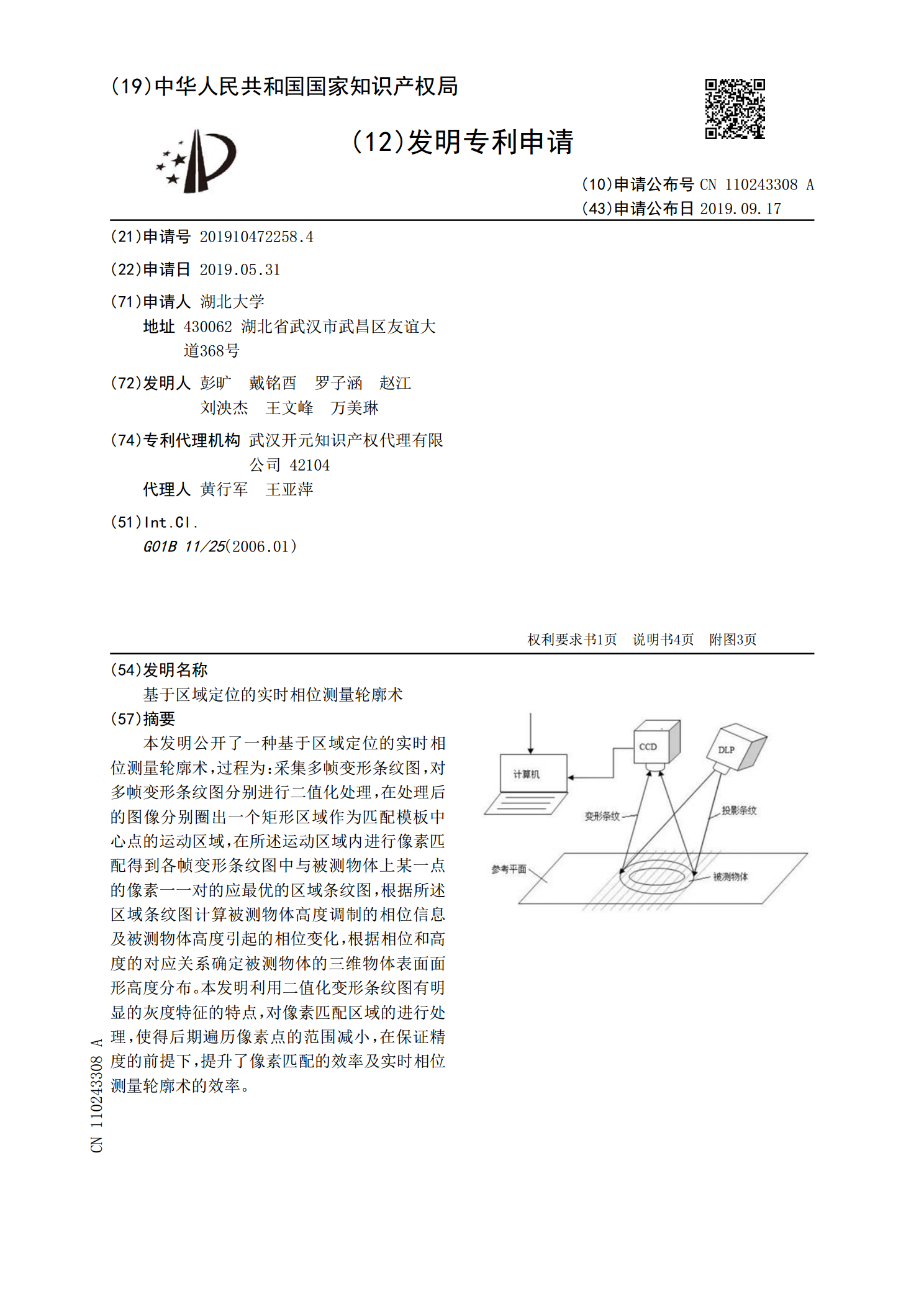
本发明公开了一种基于区域定位的实时相位测量轮廓术,过程为:采集多帧变形条纹图,对多帧变形条纹图分别进行二值化处理,在处理后的图像分别圈出一个矩形区域作为匹配模板中心点的运动区域,在所述运动区域内进行像素匹配得到各帧变形条纹图中与被测物体上某一点的像素一一对的应最优的区域条纹图,根据所述区域条纹图计算被测物体高度调制的相位信息及被测物体高度引起的相位变化,根据相位和高度的对应关系确定被测物体的三维物体表面面形高度分布。本发明利用二值化变形条纹图有明显的灰度特征的特点,对像素匹配区域的进行处理,使得后期遍历像
基于模拟退火算法的实时相位测量轮廓术.pdf
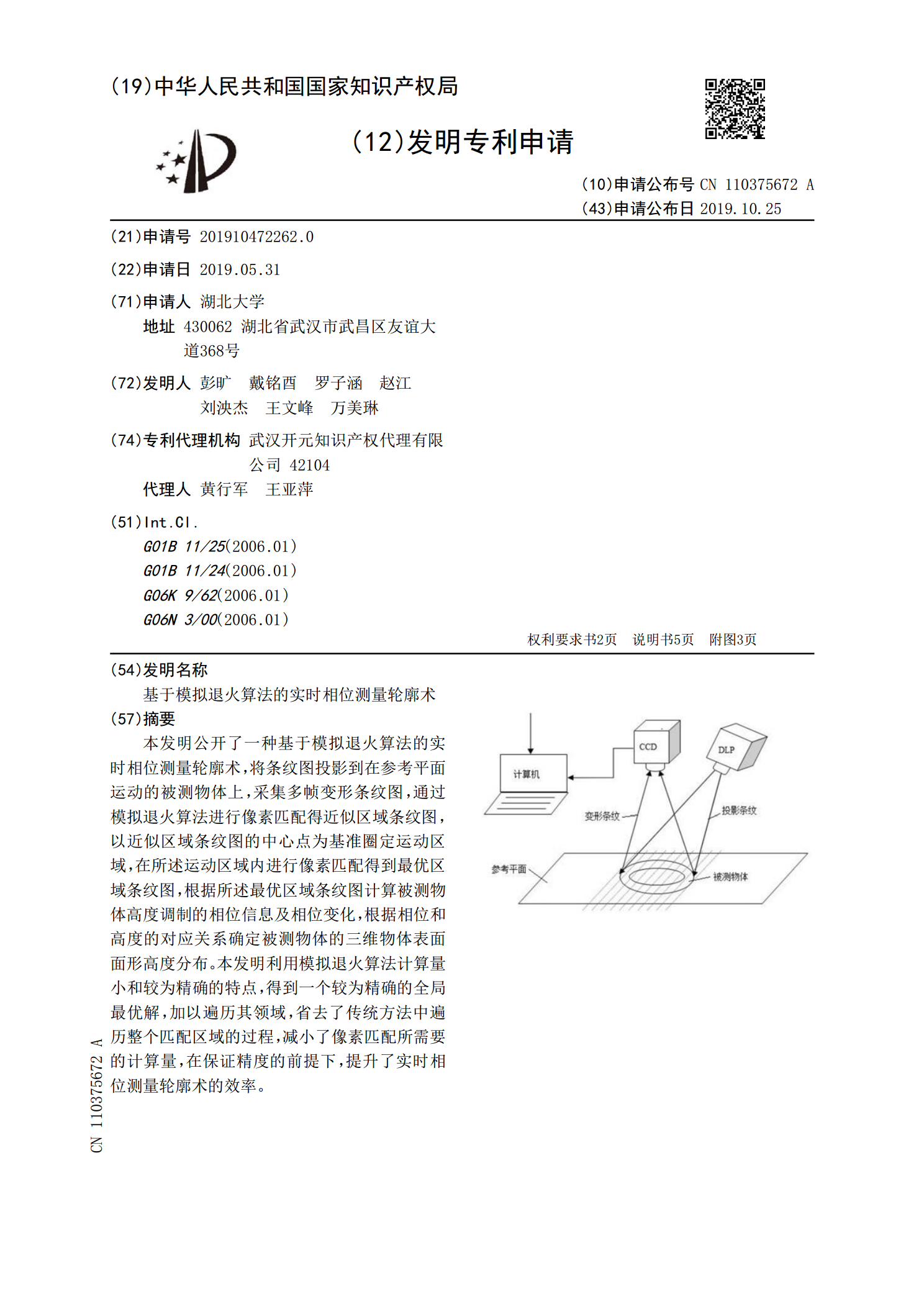
本发明公开了一种基于模拟退火算法的实时相位测量轮廓术,将条纹图投影到在参考平面运动的被测物体上,采集多帧变形条纹图,通过模拟退火算法进行像素匹配得近似区域条纹图,以近似区域条纹图的中心点为基准圈定运动区域,在所述运动区域内进行像素匹配得到最优区域条纹图,根据所述最优区域条纹图计算被测物体高度调制的相位信息及相位变化,根据相位和高度的对应关系确定被测物体的三维物体表面面形高度分布。本发明利用模拟退火算法计算量小和较为精确的特点,得到一个较为精确的全局最优解,加以遍历其领域,省去了传统方法中遍历整个匹配区域的

基于单帧四灰阶条纹投影的实时相位测量轮廓术.pptx
实时相位测量轮廓术目录添加目录项标题实时相位测量轮廓术的基本原理灰阶条纹投影原理相位测量轮廓术的原理实时相位测量轮廓术的优势实时相位测量轮廓术的实现方法单帧四灰阶条纹投影的实现相位解包裹算法相位测量轮廓术的精度和稳定性实时相位测量轮廓术的应用场景表面形貌测量物体尺寸测量物体运动轨迹测量实时监测和质量控制实时相位测量轮廓术的未来发展算法优化和改进硬件设备的升级和改进应用领域的拓展技术标准和规范的发展感谢观看

基于相位测量轮廓术的煤炭形貌测量PPT.ppt
基于相位测量轮廓术的煤炭形貌测量本文采用KineticMonte-Carlo方法对1+1维BallisticDeposition(BD)模型空洞的动力学标度行为进行了大量的数值模拟研究。制备了羧基化多壁碳纳米管修饰电极(MWNT-COOHCME)。结果表明,该修饰电极对嘌呤化合物具有良好的电催化行为。与高效液相色谱(HPLC)联用,该修饰电极可用于安培检测次黄嘌呤(HX)和黄嘌呤(X)两种化合物。在一定浓度范围内,HX和X的浓度分别与氧化峰的峰电流呈良好的线性关系,线性相关系数分别为0.9999和0.99

基于相位测量轮廓术的人脸识别.docx
基于相位测量轮廓术的人脸识别基于相位测量轮廓术的人脸识别摘要:人脸识别技术作为一种生物特征识别技术,具有广泛的应用前景。相位测量轮廓术是一种基于光学原理的三维重建技术,能够获取目标表面的几何信息。本文基于相位测量轮廓术,提出了一种基于相位测量轮廓术的人脸识别方法。首先,利用相位测量轮廓术获取人脸的三维几何信息;然后,提取人脸的特征并进行人脸识别。实验结果表明,基于相位测量轮廓术的人脸识别方法具有较高的准确率和稳定性,适用于实际应用。关键词:人脸识别;相位测量轮廓术;三维重建;特征提取1.引言人脸识别技术是