
一种异形裁断机及裁断方法.pdf

努力****绮亦

1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
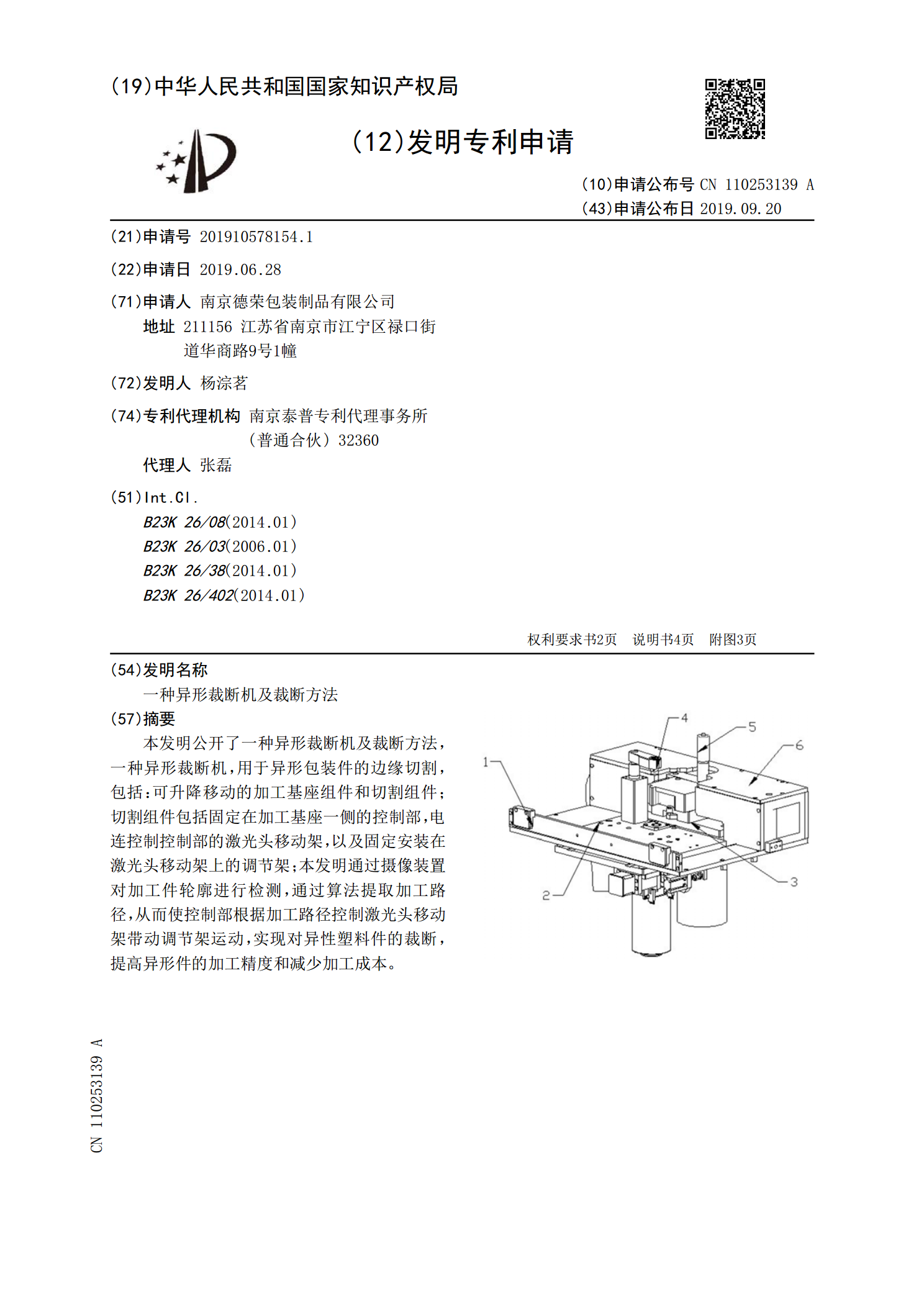
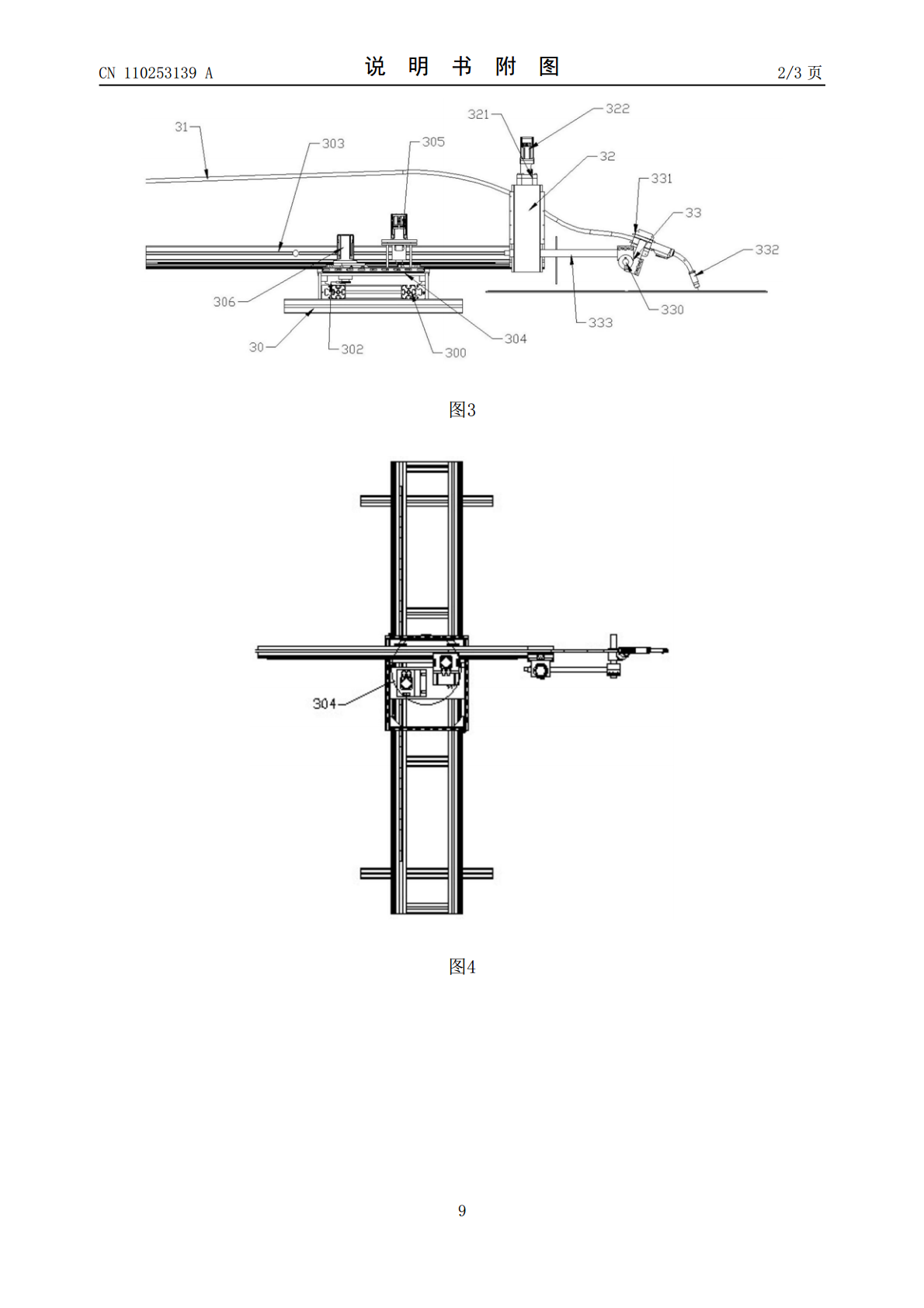
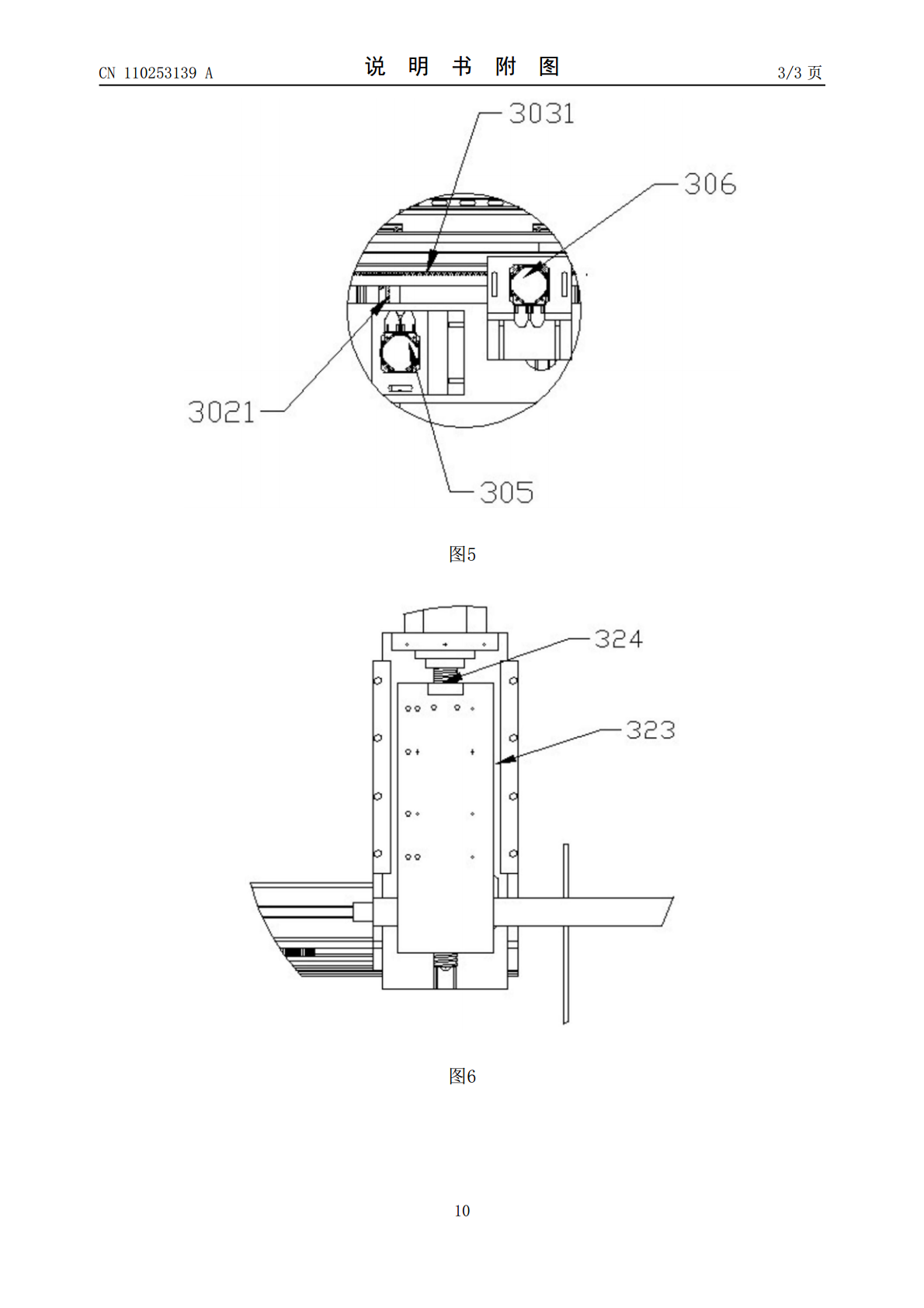
一种异形裁断机及裁断方法.pdf
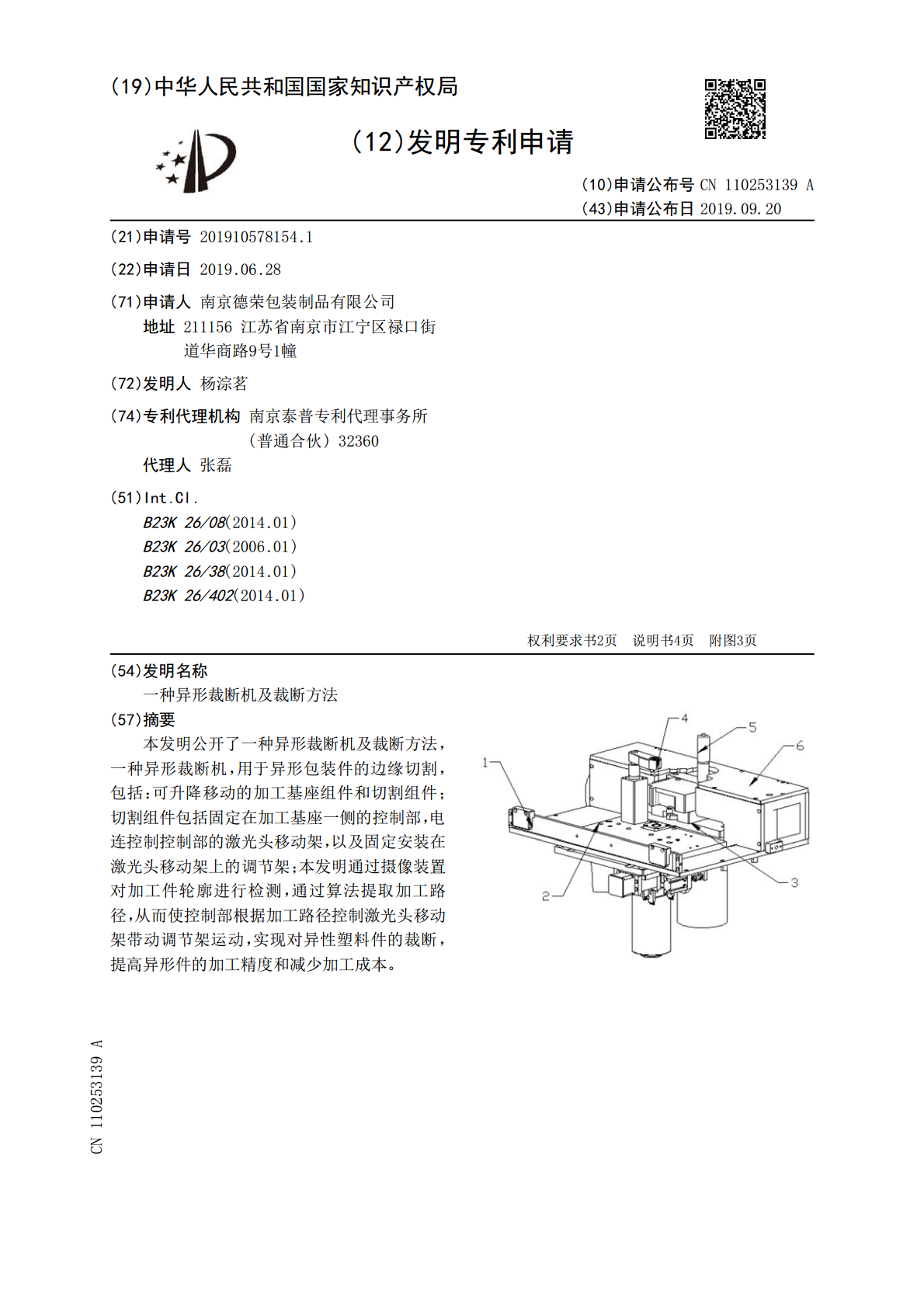
本发明公开了一种异形裁断机及裁断方法,一种异形裁断机,用于异形包装件的边缘切割,包括:可升降移动的加工基座组件和切割组件;切割组件包括固定在加工基座一侧的控制部,电连控制控制部的激光头移动架,以及固定安装在激光头移动架上的调节架;本发明通过摄像装置对加工件轮廓进行检测,通过算法提取加工路径,从而使控制部根据加工路径控制激光头移动架带动调节架运动,实现对异性塑料件的裁断,提高异形件的加工精度和减少加工成本。
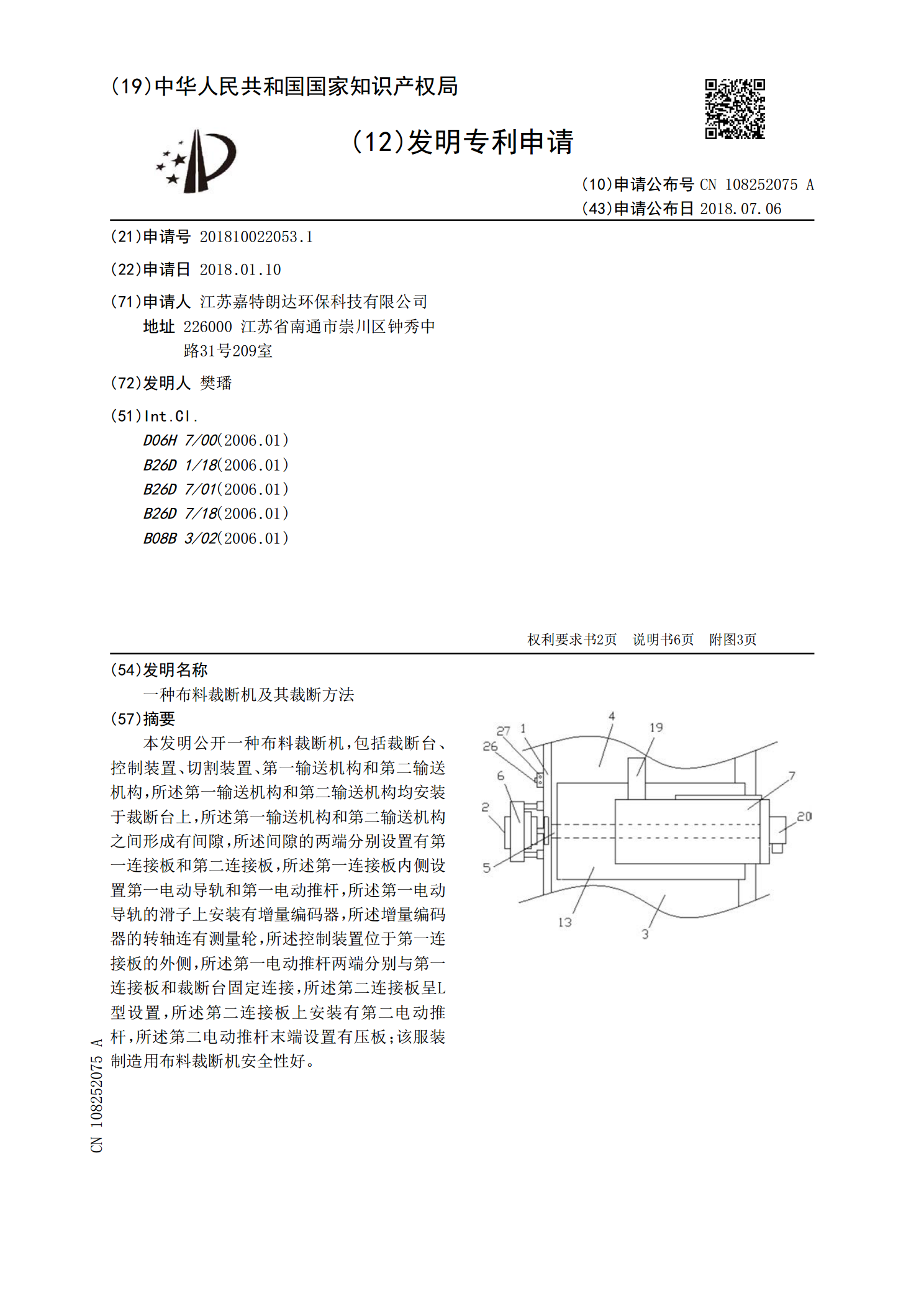
一种布料裁断机及其裁断方法.pdf
本发明公开一种布料裁断机,包括裁断台、控制装置、切割装置、第一输送机构和第二输送机构,所述第一输送机构和第二输送机构均安装于裁断台上,所述第一输送机构和第二输送机构之间形成有间隙,所述间隙的两端分别设置有第一连接板和第二连接板,所述第一连接板内侧设置第一电动导轨和第一电动推杆,所述第一电动导轨的滑子上安装有增量编码器,所述增量编码器的转轴连有测量轮,所述控制装置位于第一连接板的外侧,所述第一电动推杆两端分别与第一连接板和裁断台固定连接,所述第二连接板呈L型设置,所述第二连接板上安装有第二电动推杆,所述第二
一种拉链裁断机及其裁断方法.pdf
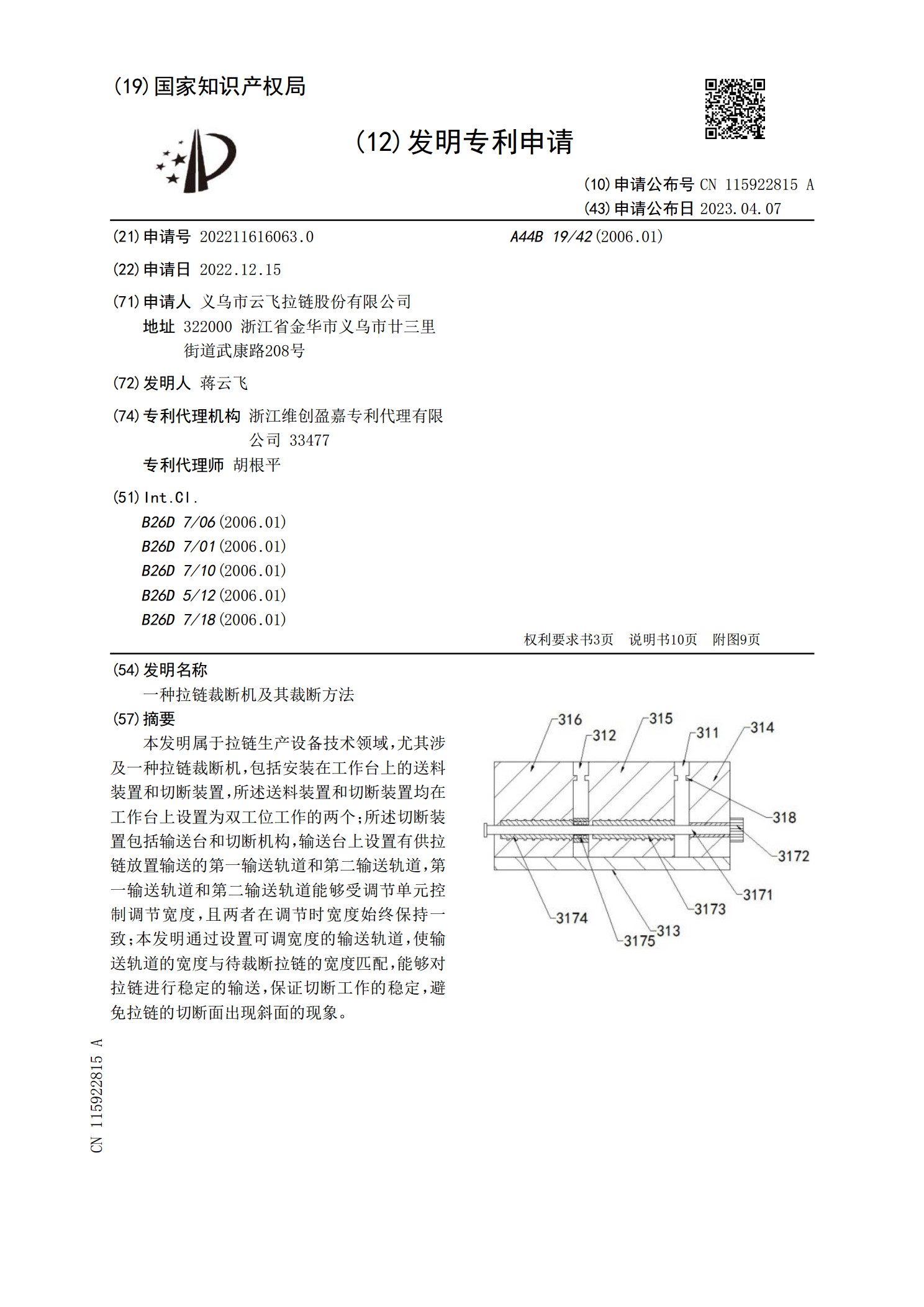
本发明属于拉链生产设备技术领域,尤其涉及一种拉链裁断机,包括安装在工作台上的送料装置和切断装置,所述送料装置和切断装置均在工作台上设置为双工位工作的两个;所述切断装置包括输送台和切断机构,输送台上设置有供拉链放置输送的第一输送轨道和第二输送轨道,第一输送轨道和第二输送轨道能够受调节单元控制调节宽度,且两者在调节时宽度始终保持一致;本发明通过设置可调宽度的输送轨道,使输送轨道的宽度与待裁断拉链的宽度匹配,能够对拉链进行稳定的输送,保证切断工作的稳定,避免拉链的切断面出现斜面的现象。
一种橡胶定长自动裁断机及裁断方法.pdf
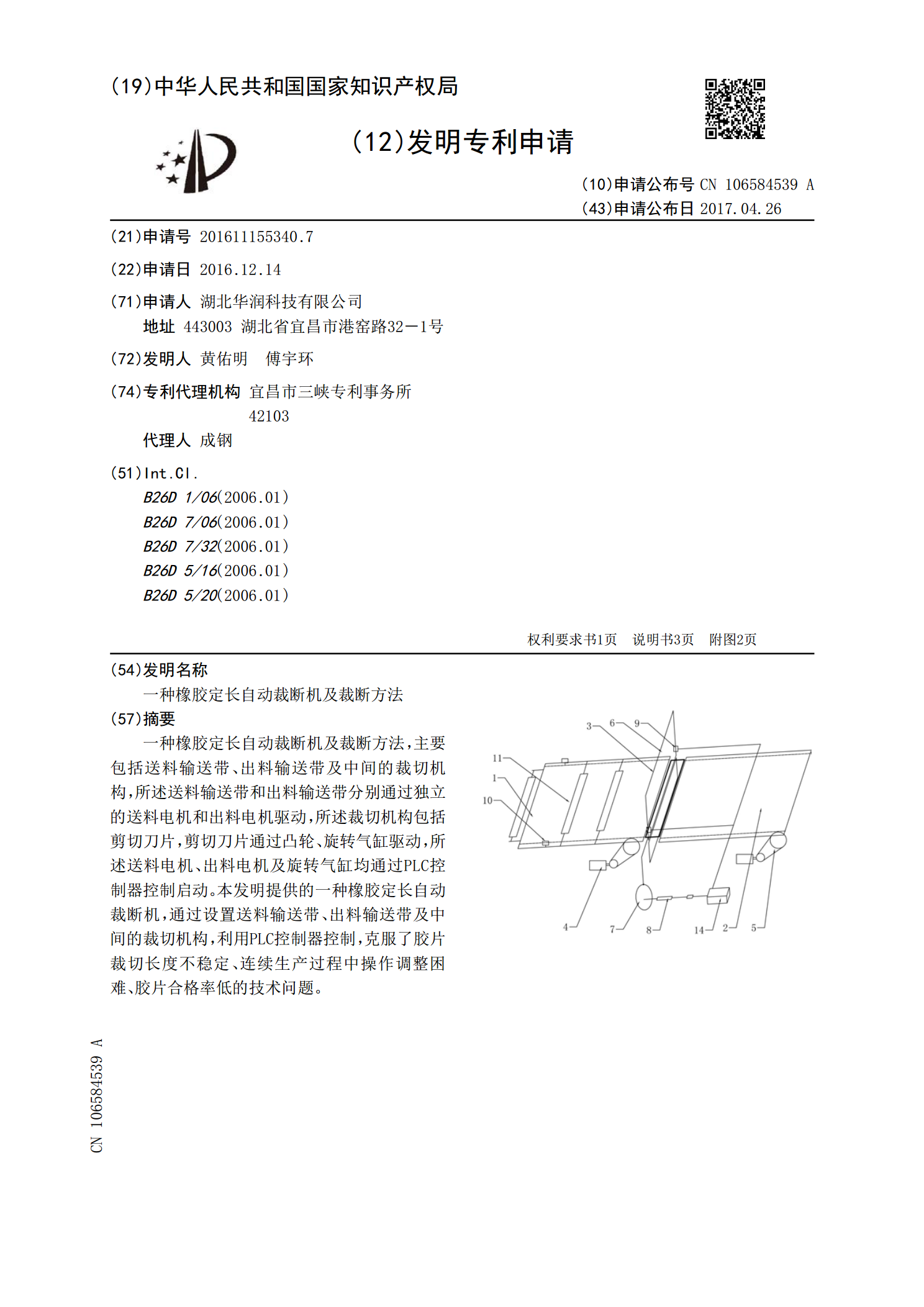
一种橡胶定长自动裁断机及裁断方法,主要包括送料输送带、出料输送带及中间的裁切机构,所述送料输送带和出料输送带分别通过独立的送料电机和出料电机驱动,所述裁切机构包括剪切刀片,剪切刀片通过凸轮、旋转气缸驱动,所述送料电机、出料电机及旋转气缸均通过PLC控制器控制启动。本发明提供的一种橡胶定长自动裁断机,通过设置送料输送带、出料输送带及中间的裁切机构,利用PLC控制器控制,克服了胶片裁切长度不稳定、连续生产过程中操作调整困难、胶片合格率低的技术问题。
一种服装制造用布料裁断机及其裁断方法.pdf
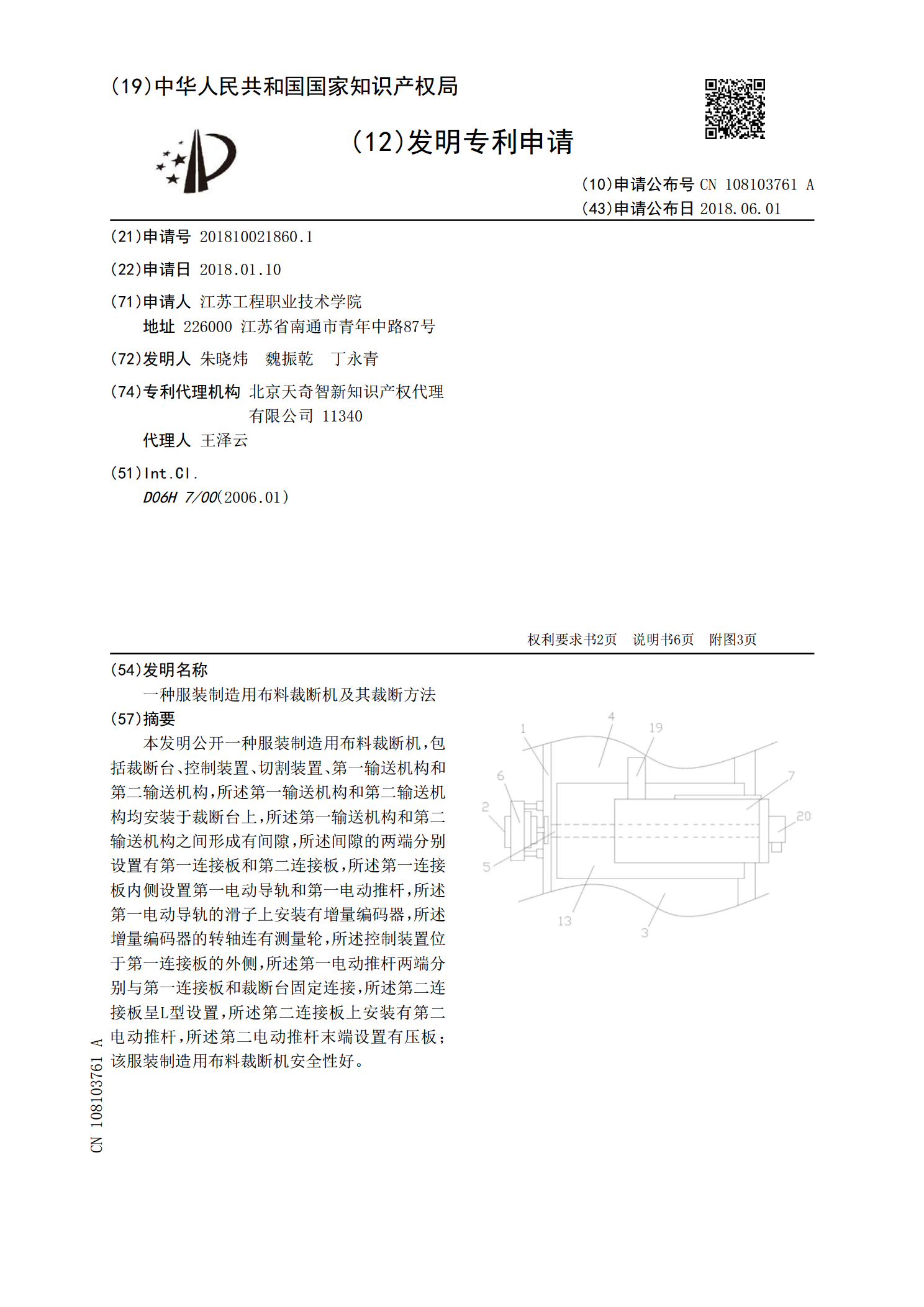
本发明公开一种服装制造用布料裁断机,包括裁断台、控制装置、切割装置、第一输送机构和第二输送机构,所述第一输送机构和第二输送机构均安装于裁断台上,所述第一输送机构和第二输送机构之间形成有间隙,所述间隙的两端分别设置有第一连接板和第二连接板,所述第一连接板内侧设置第一电动导轨和第一电动推杆,所述第一电动导轨的滑子上安装有增量编码器,所述增量编码器的转轴连有测量轮,所述控制装置位于第一连接板的外侧,所述第一电动推杆两端分别与第一连接板和裁断台固定连接,所述第二连接板呈L型设置,所述第二连接板上安装有第二电动推杆