
基于二阶滑移率模型的车辆防抱死制动系统滑移率约束控制算法.pdf

一吃****福乾

1/10
2/10
3/10
4/10
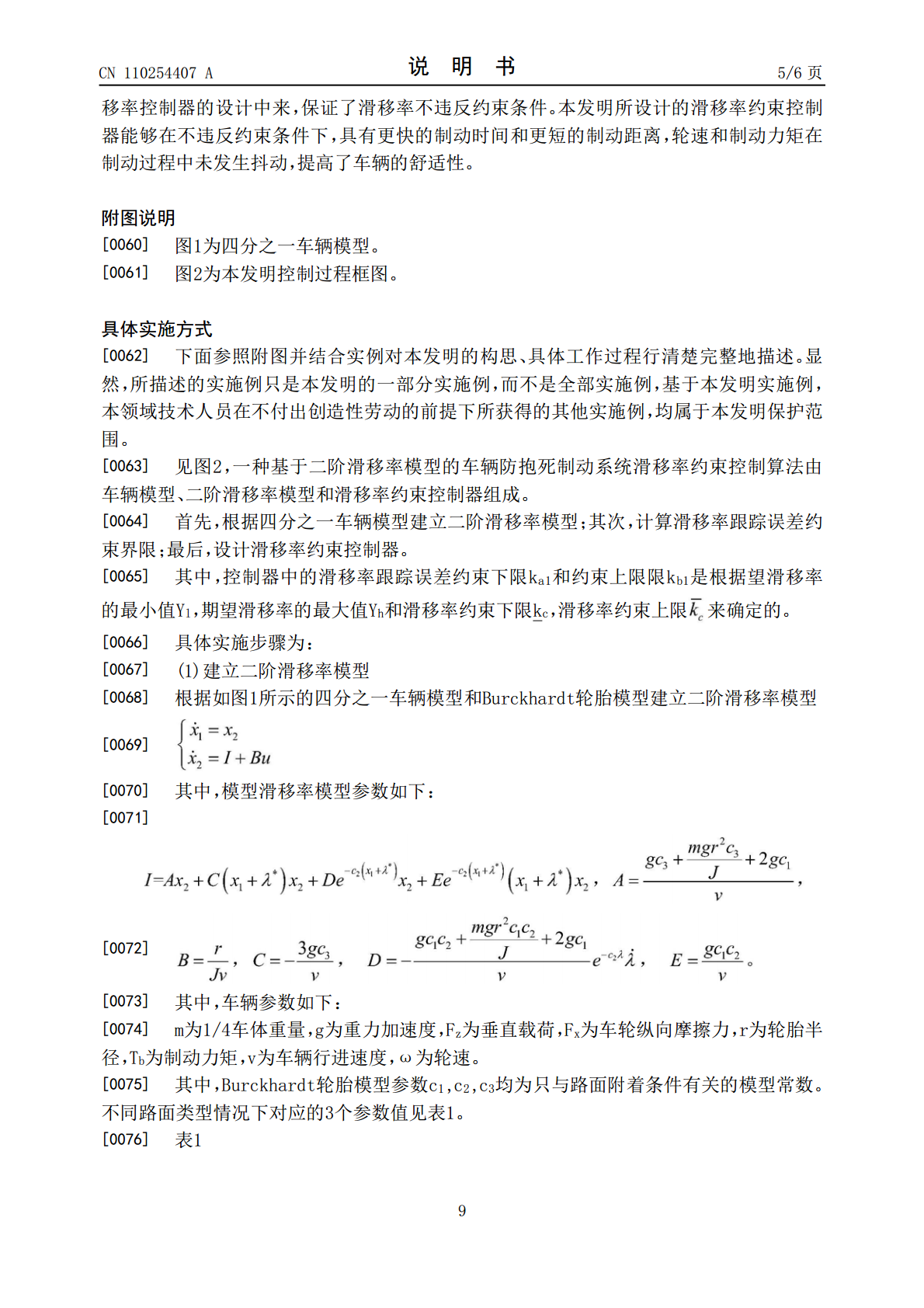
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于二阶滑移率模型的车辆防抱死制动系统滑移率约束控制算法.pdf
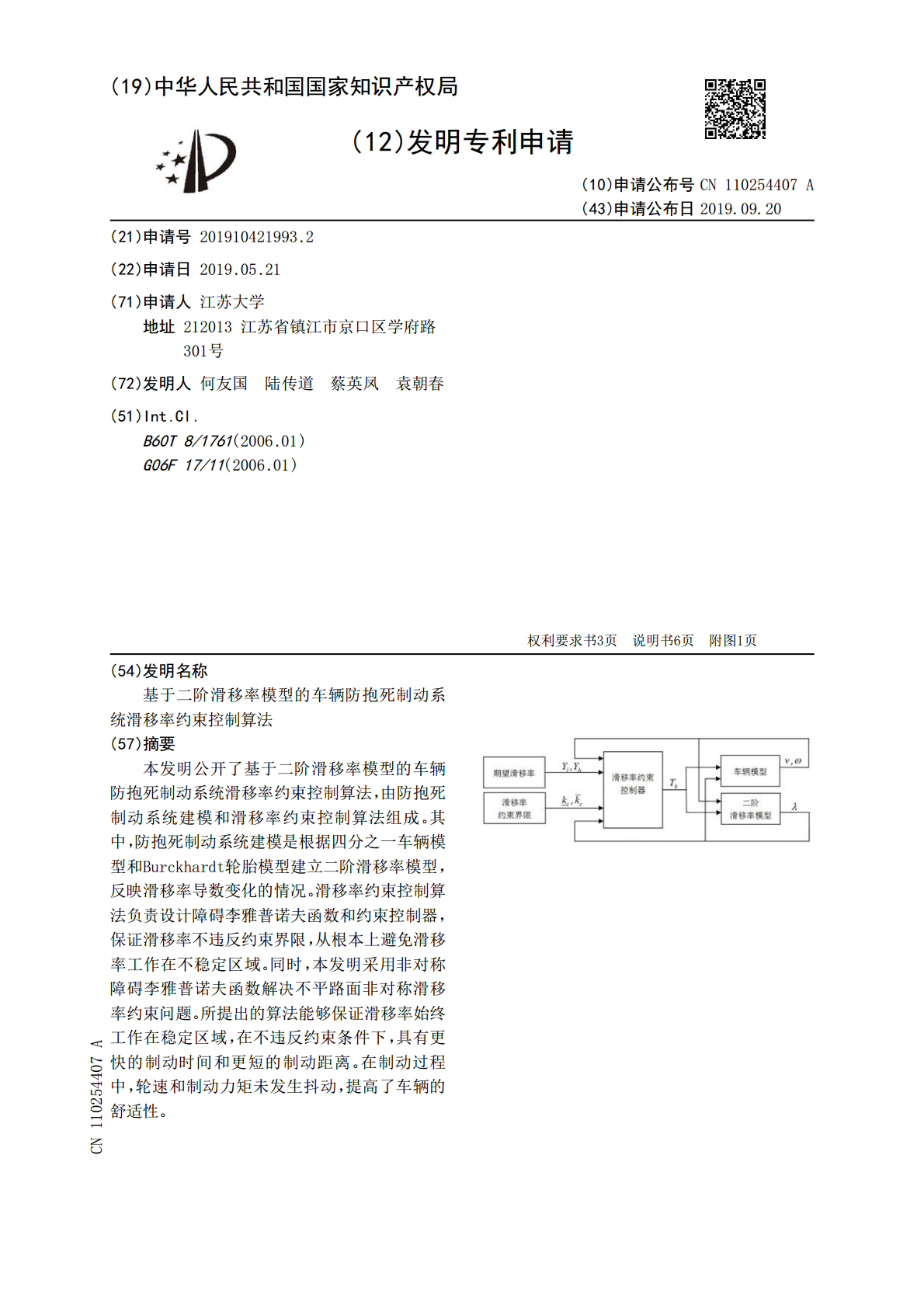
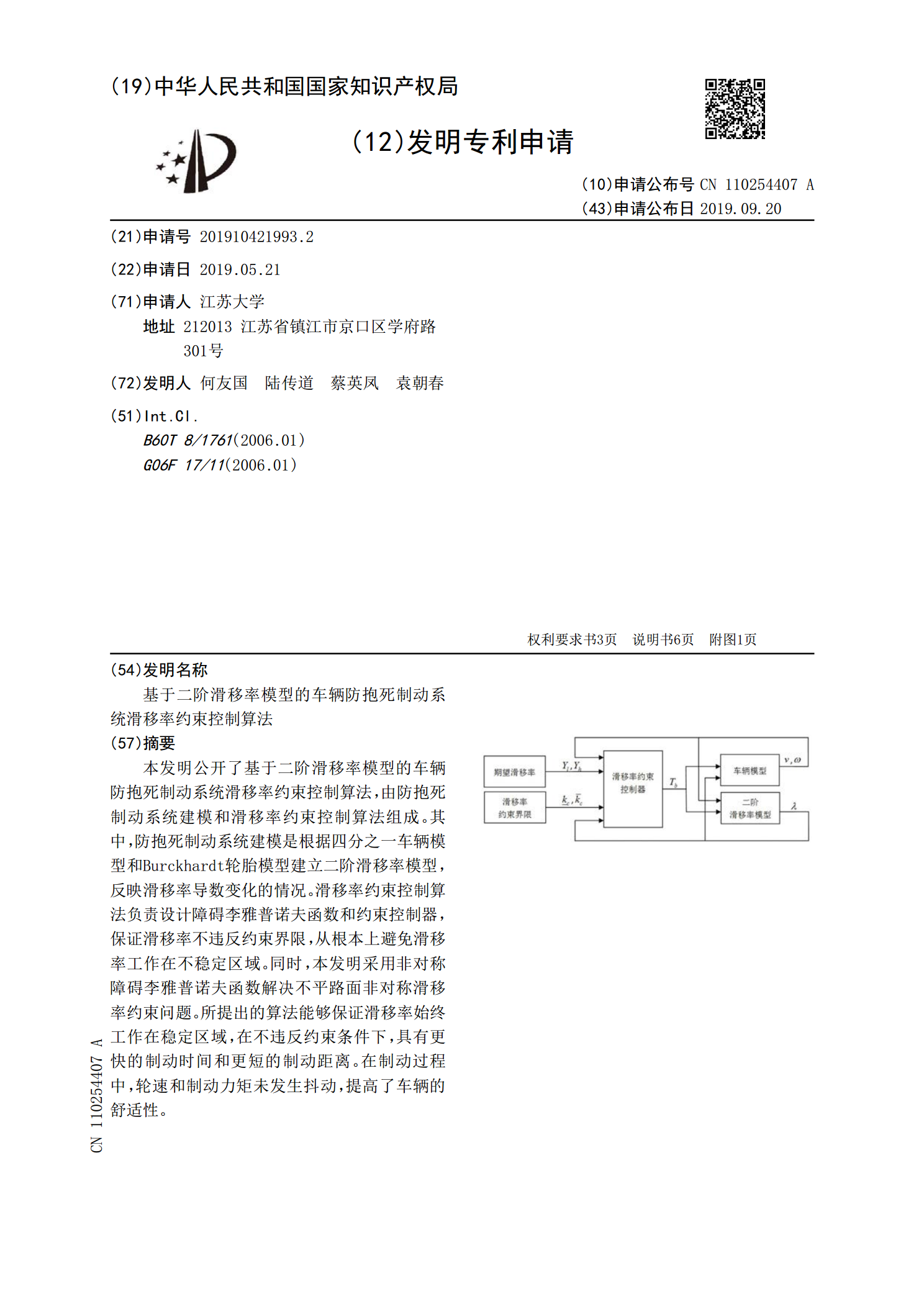
本发明公开了基于二阶滑移率模型的车辆防抱死制动系统滑移率约束控制算法,由防抱死制动系统建模和滑移率约束控制算法组成。其中,防抱死制动系统建模是根据四分之一车辆模型和Burckhardt轮胎模型建立二阶滑移率模型,反映滑移率导数变化的情况。滑移率约束控制算法负责设计障碍李雅普诺夫函数和约束控制器,保证滑移率不违反约束界限,从根本上避免滑移率工作在不稳定区域。同时,本发明采用非对称障碍李雅普诺夫函数解决不平路面非对称滑移率约束问题。所提出的算法能够保证滑移率始终工作在稳定区域,在不违反约束条件下,具有更快的制

基于滑移率的车辆防抱死制动系统控制算法研究.docx
基于滑移率的车辆防抱死制动系统控制算法研究摘要车辆防抱死制动系统(ABS)被广泛应用于汽车行业,以提高车辆在紧急状况下的制动性能。本文研究的目的是设计一种基于滑移率的ABS控制算法,以保证车辆在紧急制动时不失控。首先介绍了ABS系统以及滑移率的概念和影响因素,然后阐述了基于滑移率的ABS控制策略的设计原理并进行了仿真验证。仿真结果表明基于滑移率的ABS控制算法可有效地控制车辆的制动,并且与传统的控制算法相比,具有更优秀的性能。关键词车辆防抱死制动系统、滑移率、控制算法、仿真验证引言车辆防抱死制动系统(AB

基于滑移率的车辆防抱死制动系统的研究.docx
基于滑移率的车辆防抱死制动系统的研究一、概述随着汽车工业的快速发展和道路交通的日益繁忙,车辆行驶的安全性问题越来越受到人们的关注。车辆制动性能的好坏直接关系到行车安全,尤其在紧急制动或湿滑路面制动时,车辆抱死现象的发生往往会导致轮胎与地面间的摩擦力大幅下降,从而增加制动距离,甚至引发侧滑、侧翻等严重交通事故。研究并开发一种能够有效防止车辆抱死的制动系统具有重要的现实意义和应用价值。基于滑移率的车辆防抱死制动系统(AntilockBrakingSystem,简称ABS)正是针对这一问题而提出的解决方案。它通

基于滑移率的车辆防抱死制动系统控制算法研究的中期报告.docx
基于滑移率的车辆防抱死制动系统控制算法研究的中期报告本报告旨在介绍基于滑移率的车辆防抱死制动系统(ABS)控制算法的研究进展。研究背景和意义:车辆防抱死制动系统是一种非常重要的车辆安全措施,它能够避免车辆在紧急制动时出现轮胎抱死、车辆失控等情况,从而确保车辆行驶安全。在汽车制造业的快速发展中,ABS技术已经成为标配,并不断进化和完善。传统的ABS控制算法是基于轮速差(即前轮和后轮的速度差)的控制方法,然而,这种方法存在着一些缺点,例如转向过度、制动距离过长等问题。因此,研究基于滑移率的ABS控制算法具有实

基于滑移率的车辆防抱死制动系统控制算法研究的任务书.docx
基于滑移率的车辆防抱死制动系统控制算法研究的任务书任务书一、题目基于滑移率的车辆防抱死制动系统控制算法研究二、背景近年来,汽车防抱死制动系统(ABS)成为了车辆安全控制系统的重要组成部分之一,防止车辆在制动时轮胎失去抓地力,导致车辆滑动甚至失控的现象。大多数ABS系统采用了轮速传感器或车轮加速度传感器来监测车轮的状态,根据微处理器进行判断和控制,使制动量适时减小,以维持轮胎的抓地摩擦力在最大值附近。然而,这种传统的ABS控制方法具有对称性,无法区分轮胎的打滑和抱死问题。普通ABS系统会缩减制动力度,以预防