
一种双记忆弹簧牵引的往复式双向驱动装置.pdf

宁馨****找我

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种双记忆弹簧牵引的往复式双向驱动装置.pdf
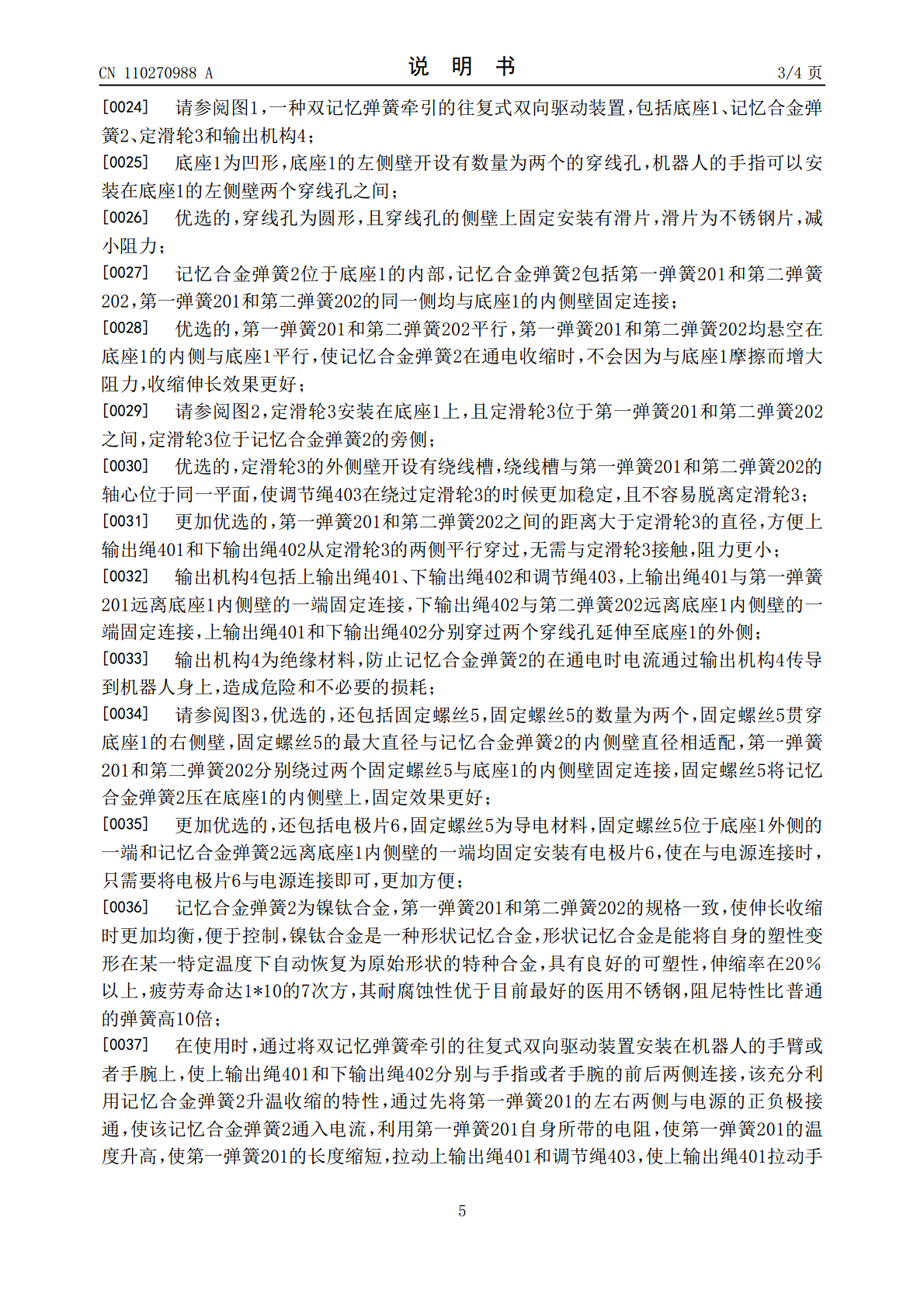
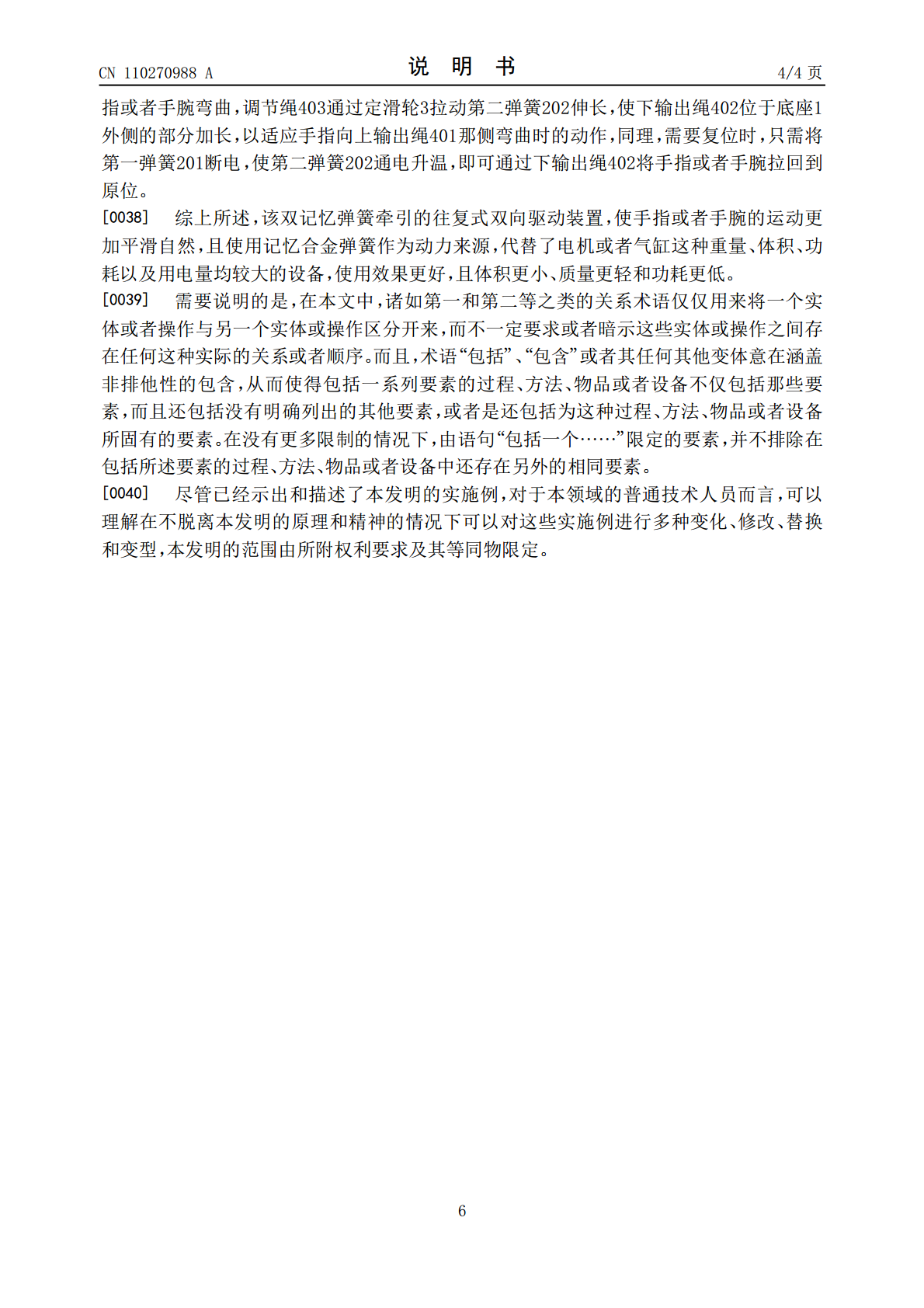
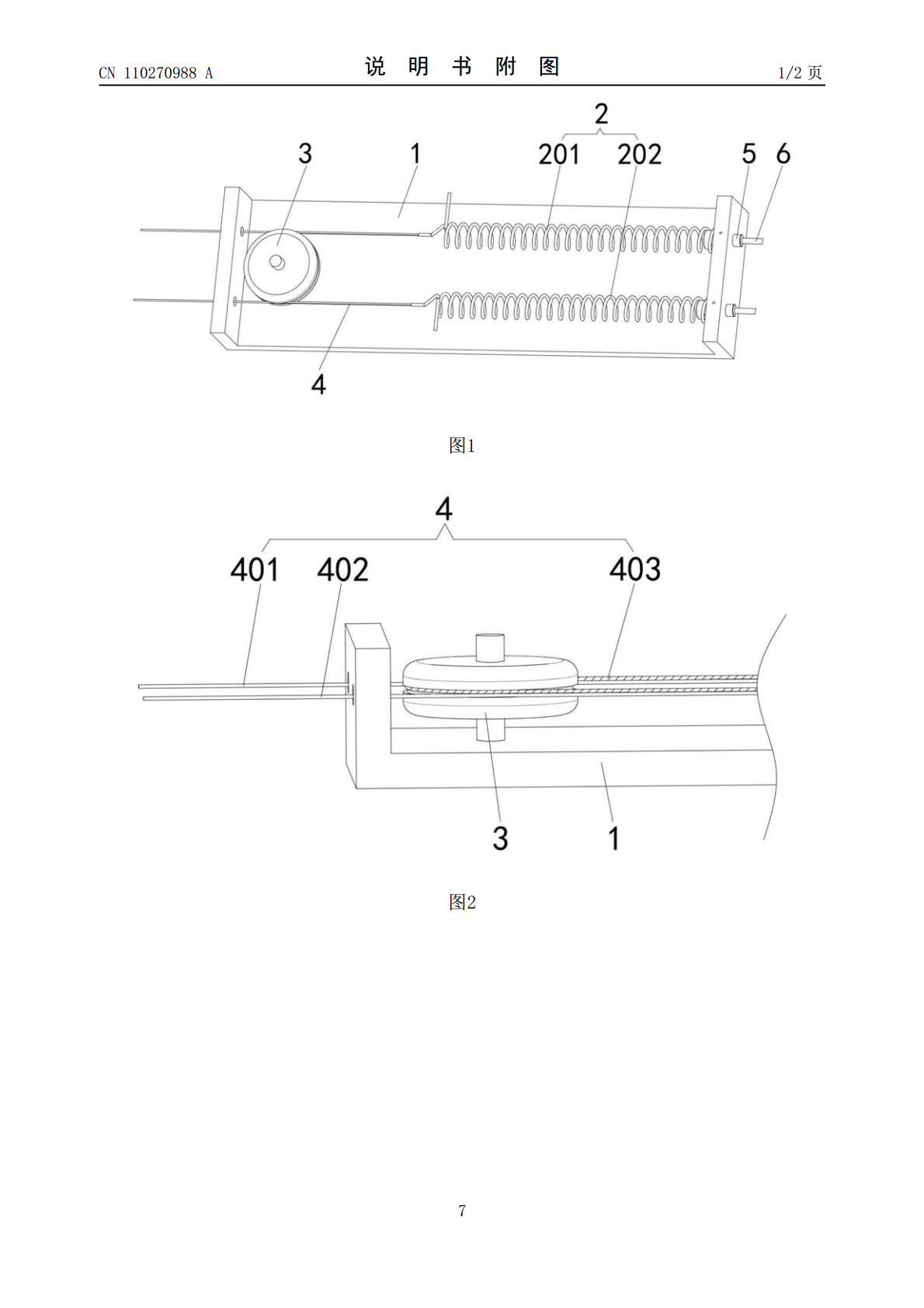
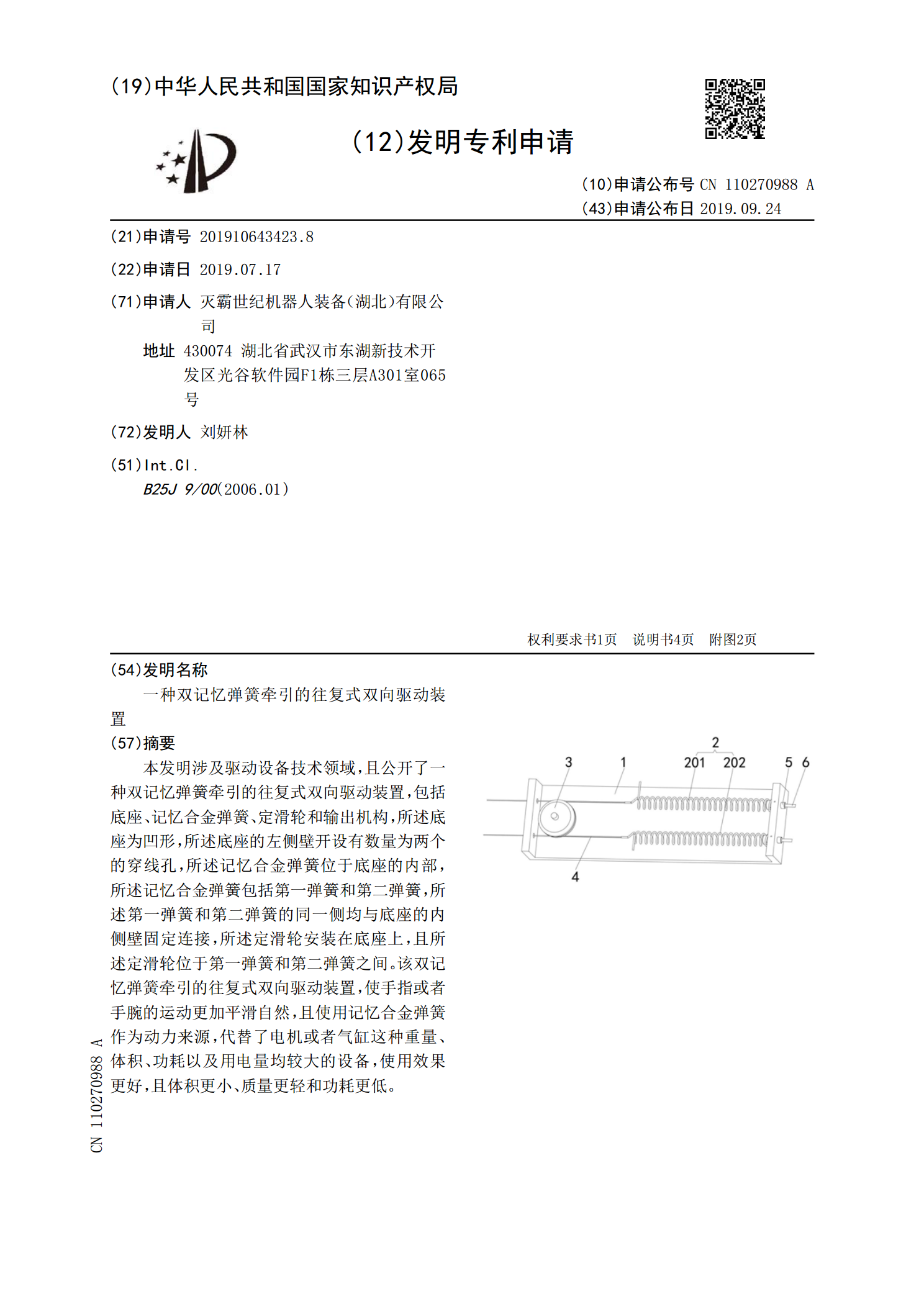
本发明涉及驱动设备技术领域,且公开了一种双记忆弹簧牵引的往复式双向驱动装置,包括底座、记忆合金弹簧、定滑轮和输出机构,所述底座为凹形,所述底座的左侧壁开设有数量为两个的穿线孔,所述记忆合金弹簧位于底座的内部,所述记忆合金弹簧包括第一弹簧和第二弹簧,所述第一弹簧和第二弹簧的同一侧均与底座的内侧壁固定连接,所述定滑轮安装在底座上,且所述定滑轮位于第一弹簧和第二弹簧之间。该双记忆弹簧牵引的往复式双向驱动装置,使手指或者手腕的运动更加平滑自然,且使用记忆合金弹簧作为动力来源,代替了电机或者气缸这种重量、体积、功耗

一种单动力双驱动往复式毛刷装置.pdf
本发明提供一种单动力双驱动往复式毛刷装置,包括毛刷、毛刷驱动机构和位置调节机构,毛刷驱动机构为毛刷提供工作动力,位置调节机构能调节通过带动毛刷驱动机构运动从而调节毛刷的位置和行程;毛刷驱动机构包括电机、同步驱动机构和可调偏心凸轮机构,位置调节机构包括高度调节机构和行程调节机构,毛刷驱动机构通过固定板与所述位置调节机构连接。本发明通过可调偏心凸轮轴的调整螺杆可实现调整毛刷装置前后位移行程,精确定位往复位移,能够达到对毛刷及位移的同步驱动,两个被驱动装置实现同步异速,通过PLC自动控制系统以及一系列阀门的控制

一种双环驱动臂弹簧以及舷外机飞轮驱动装置.pdf
本实用新型公开了一种双环驱动臂弹簧以及舷外机飞轮驱动装置,一种双环驱动臂弹簧,包括:驱动臂弹簧本体,所述的驱动臂弹簧本体的一端绕设有第一环和第二环,所述的驱动臂弹簧本体的另一端为驱动臂的连接端。一种舷外机飞轮驱动装置,包括:启动轮、回位弹簧、压板夹簧、双环驱动臂弹簧和驱动臂;所述的双环驱动臂弹簧安装在所述启动轮上;所述的双环驱动臂弹簧连接所述驱动臂、回位弹簧和压板夹簧。所述双环驱动臂弹簧用于连接驱动臂、回位弹簧和压板夹簧;双环驱动臂弹簧将回位弹簧和压板夹簧分隔到两个圆环中,防止驱动臂运动过程中回位弹簧和压
一种双向驱动装置.pdf
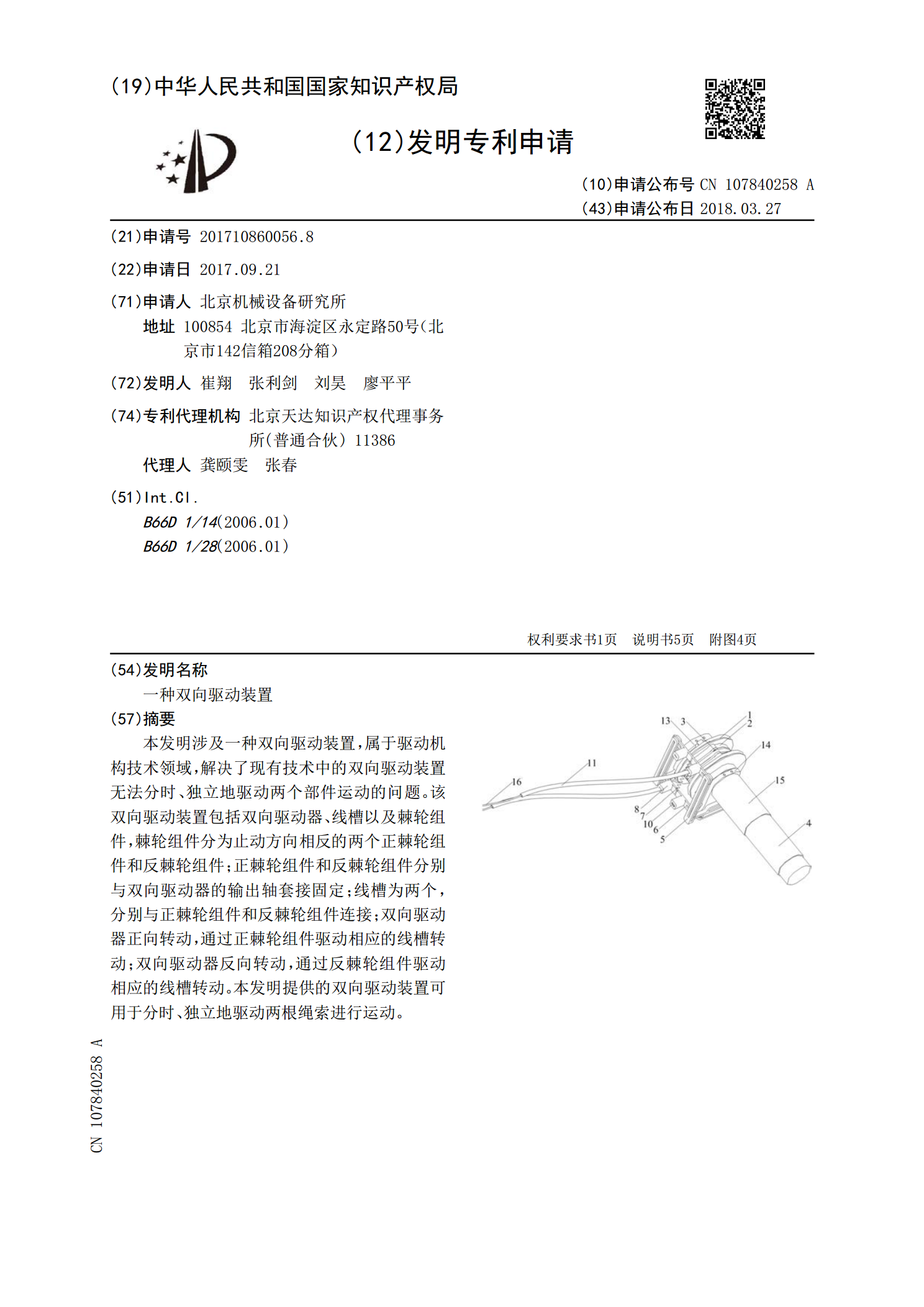
本发明涉及一种双向驱动装置,属于驱动机构技术领域,解决了现有技术中的双向驱动装置无法分时、独立地驱动两个部件运动的问题。该双向驱动装置包括双向驱动器、线槽以及棘轮组件,棘轮组件分为止动方向相反的两个正棘轮组件和反棘轮组件;正棘轮组件和反棘轮组件分别与双向驱动器的输出轴套接固定;线槽为两个,分别与正棘轮组件和反棘轮组件连接;双向驱动器正向转动,通过正棘轮组件驱动相应的线槽转动;双向驱动器反向转动,通过反棘轮组件驱动相应的线槽转动。本发明提供的双向驱动装置可用于分时、独立地驱动两根绳索进行运动。
自通风双向牵引驱动单元.pdf
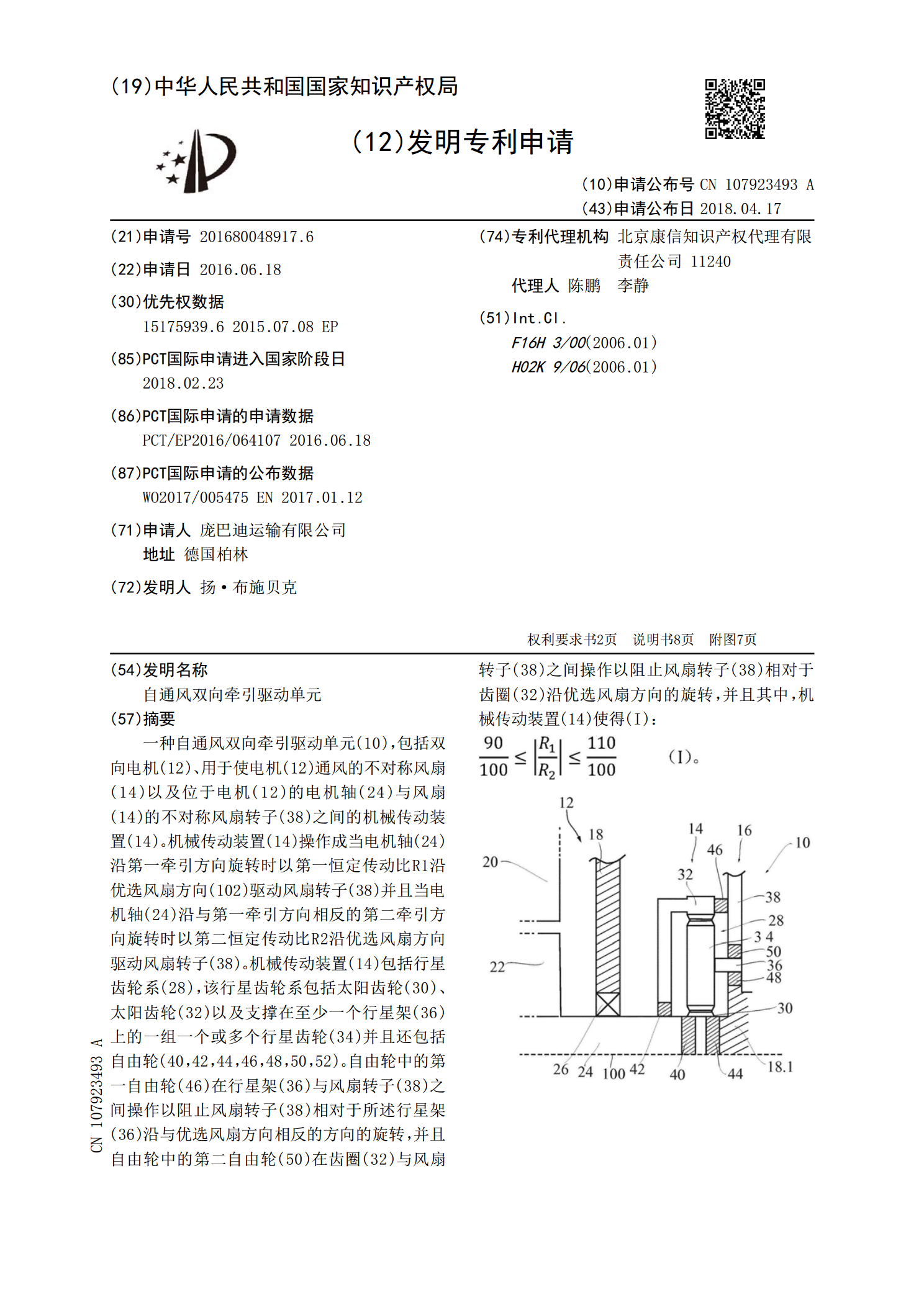
一种自通风双向牵引驱动单元(10),包括双向电机(12)、用于使电机(12)通风的不对称风扇(14)以及位于电机(12)的电机轴(24)与风扇(14)的不对称风扇转子(38)之间的机械传动装置(14)。机械传动装置(14)操作成当电机轴(24)沿第一牵引方向旋转时以第一恒定传动比R1沿优选风扇方向(102)驱动风扇转子(38)并且当电机轴(24)沿与第一牵引方向相反的第二牵引方向旋转时以第二恒定传动比R2沿优选风扇方向驱动风扇转子(38)。机械传动装置(14)包括行星齿轮系(28),该行星齿轮系包括太阳齿