
基于机器学习算法的涡轴发动机稳态开环控制设计方法.pdf

羽沫****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于机器学习算法的涡轴发动机稳态开环控制设计方法.pdf
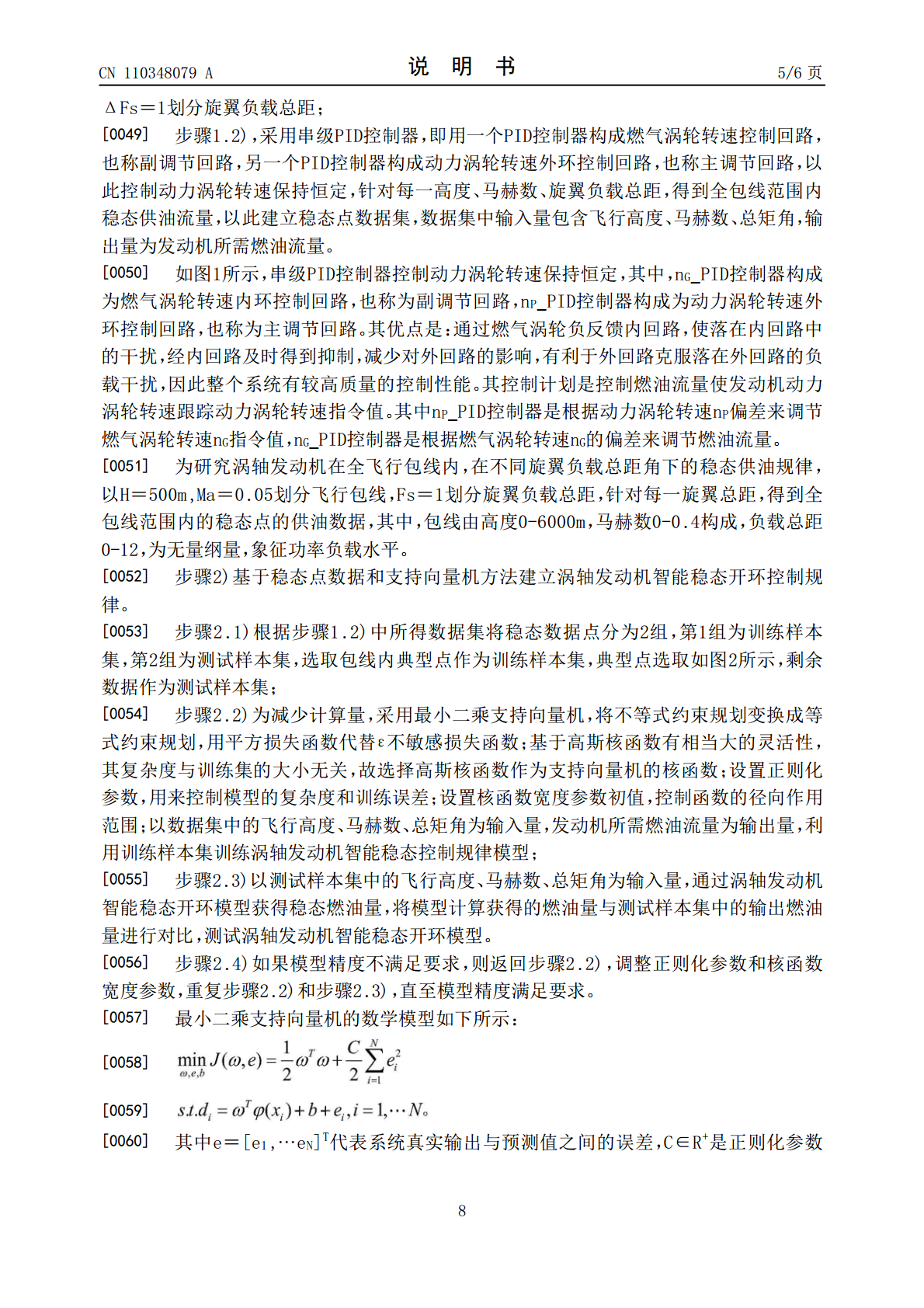
本发明公开了一种基于机器学习算法的涡轴发动机稳态开环控制设计方法,本发明采用两个PID控制器构成内外回路对涡轴发动机转速进行控制,获取涡轴发动机各稳态点处的输入输出数据,通过燃气涡轮负反馈内回路,使落在内回路中的干扰,经内回路及时得到抑制,减少对外回路的影响,有利于外回路克服落在外回路的负载干扰,因此整个系统有较高质量的控制性能。将所获取的稳态点数据分成2组,一组为训练样本集,一组为测试样本集。

基于混合算法的涡轴发动机稳态性能仿真模型.docx
基于混合算法的涡轴发动机稳态性能仿真模型基于混合算法的涡轴发动机稳态性能仿真模型摘要:本文基于混合算法,提出了一种涡轴发动机稳态性能仿真模型。该模型融合了神经网络算法和遗传算法,通过对输入参数的训练和优化,实现了对涡轴发动机的稳态性能进行仿真和评估。实验结果表明,该模型具有较高的准确性和可靠性,可以为涡轴发动机的优化设计和性能预测提供参考依据。1.引言涡轴发动机作为一种新型的内燃机,具有高效率、低排放和高功率密度等优点,在航空和汽车行业中得到了广泛的应用。为了实现涡轴发动机的优化设计和性能预测,需要建立一

基于混合算法的涡轴发动机稳态性能仿真模型.docx
基于混合算法的涡轴发动机稳态性能仿真模型基于混合算法的涡轴发动机稳态性能仿真模型摘要:随着汽车工业的快速发展,涡轴发动机作为一种新型的可变气门正时加冲压缸内直喷混合动力的发动机在汽车领域中广泛应用。针对涡轴发动机的稳态性能分析与仿真,本文提出了一种基于混合算法的仿真模型。该模型结合了涡轴发动机的动态特性与燃烧过程,通过数值计算模拟了发动机各工况的性能参数,为发动机设计提供了有效的参考。关键词:涡轴发动机;稳态性能;仿真模型;混合算法引言涡轴发动机是一种通过控制进气阀门与排气阀门运动轨迹来实现气门正时可调的
基于混合算法的涡轴发动机稳态性能仿真模型.pptx
汇报人:/目录0102混合算法的定义和原理混合算法在涡轴发动机稳态性能仿真中的应用混合算法的优势和局限性03涡轴发动机的工作原理和稳态性能指标传统涡轴发动机稳态性能仿真模型的局限性基于混合算法的涡轴发动机稳态性能仿真模型的建立04算法流程和关键步骤算法参数的选择和优化算法的收敛性和稳定性分析05仿真结果的展示和解释仿真结果与传统模型的比较和分析模型的有效性和可靠性验证06基于混合算法的涡轴发动机稳态性能仿真模型的意义和价值对未来研究的建议和展望汇报人:
基于内模原理的涡轴发动机状态反馈控制方法.pdf
第22卷第5期航空动力学报Vol.22No.52007年5月JournalofAerospacePowerMay.2007文章编号:100028055(2007)0520829204基于内模原理的涡轴发动机状态反馈控制方法李胜泉1,2,杨征山2,孙健国1(11南京航空航天大学能源与动力学院,南京210016;21中国航空动力控制系统研究所,无锡214063)摘要:某型涡轴发动机全权限数控系统采用了状态反馈控制方式.根据内模原理,引入伺服补偿器,使设计的控制系统不仅具有较强的鲁棒性,而且在用于指令跟踪时能消