
一种电动轮椅及电动轮椅自动跟随人员的方法.pdf

猫巷****觅蓉


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种电动轮椅及电动轮椅自动跟随人员的方法.pdf
一种电动轮椅及电动轮椅自动跟随人员的方法,属于智能电子设备技术领域,在传统的电动轮椅结构上增设嵌入式计算机、双目相机及触摸屏,其结构新颖,而电动轮椅自动跟随人员的方法则丰富了现有市场上电动轮椅的功能,特别是将行人检测与双目相机相结合,在室内与室外环境下均可实现准确的二维图像上的人检测与三维空间中的人定位;根据空间位置关系实现了被跟随人员的自动选取;利用三维空间中人移动的连续性可快速确定被跟随的目标人员;采用比例控制器控制轮椅运动完成目标人员跟随,简单可靠。
自动升降电动轮椅.pdf
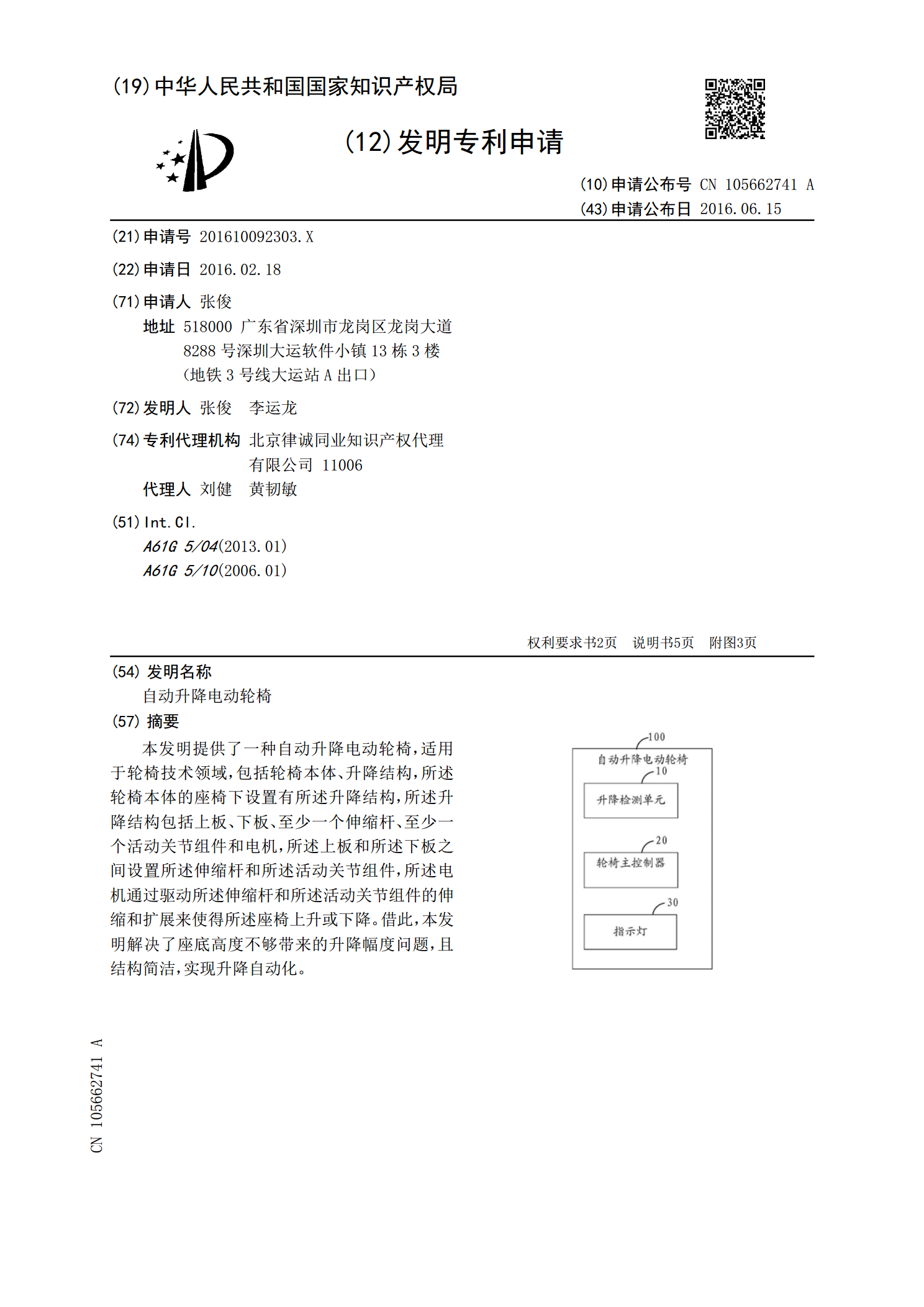
本发明提供了一种自动升降电动轮椅,适用于轮椅技术领域,包括轮椅本体、升降结构,所述轮椅本体的座椅下设置有所述升降结构,所述升降结构包括上板、下板、至少一个伸缩杆、至少一个活动关节组件和电机,所述上板和所述下板之间设置所述伸缩杆和所述活动关节组件,所述电机通过驱动所述伸缩杆和所述活动关节组件的伸缩和扩展来使得所述座椅上升或下降。借此,本发明解决了座底高度不够带来的升降幅度问题,且结构简洁,实现升降自动化。

基于霍尔摇杆的电动轮椅控制方法及电动轮椅.pdf
本发明公开了一种基于霍尔摇杆的电动轮椅控制方法,通过将将霍尔摇杆的Y轴偏移量加上m倍的X轴偏移量获得第一命令值,将所述Y轴偏移量减去n倍的X轴偏移量获得第二命令值,所述第一命令值用于确定左电机的PWM值和转向,所述第二命令值用于确定右电机的PWM值和转向,也就是,基于霍尔摇杆的X轴,Y轴,Y=‑mX,Y=nX将平面划分为八个区间来决定电动轮椅的行驶方式,解决了现有技术采用霍尔摇杆的X轴和Y轴将平面划分为四个区间来决定行驶方式过于简单而不能满足用户多样化和舒适度的需求,使得轮椅行驶更灵活,功能更完善。
电动轮椅交互装置、电动轮椅.pdf
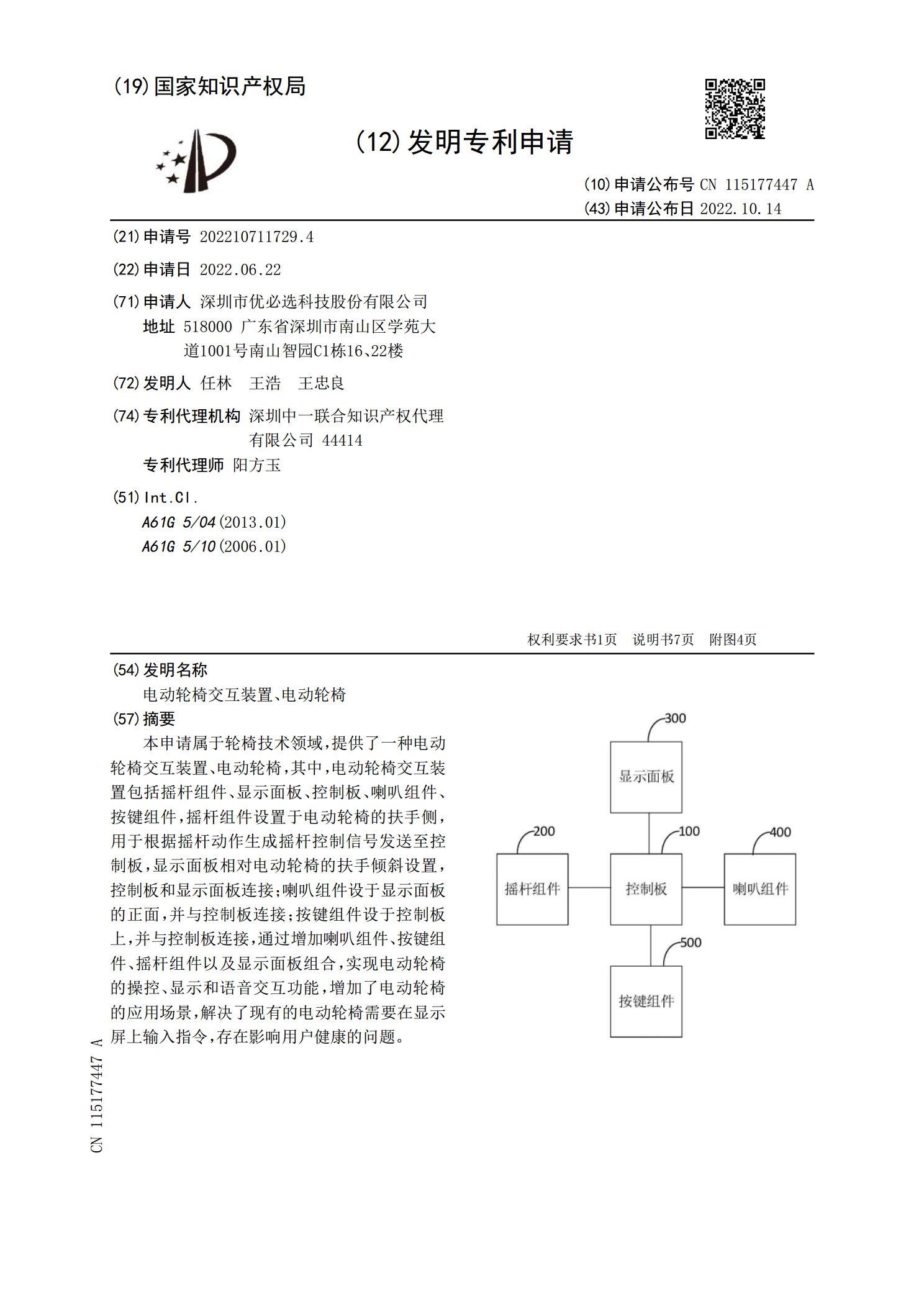
本申请属于轮椅技术领域,提供了一种电动轮椅交互装置、电动轮椅,其中,电动轮椅交互装置包括摇杆组件、显示面板、控制板、喇叭组件、按键组件,摇杆组件设置于电动轮椅的扶手侧,用于根据摇杆动作生成摇杆控制信号发送至控制板,显示面板相对电动轮椅的扶手倾斜设置,控制板和显示面板连接;喇叭组件设于显示面板的正面,并与控制板连接;按键组件设于控制板上,并与控制板连接,通过增加喇叭组件、按键组件、摇杆组件以及显示面板组合,实现电动轮椅的操控、显示和语音交互功能,增加了电动轮椅的应用场景,解决了现有的电动轮椅需要在显示屏上输
基于重心测控的电动轮椅的爬楼方法及其电动轮椅.pdf
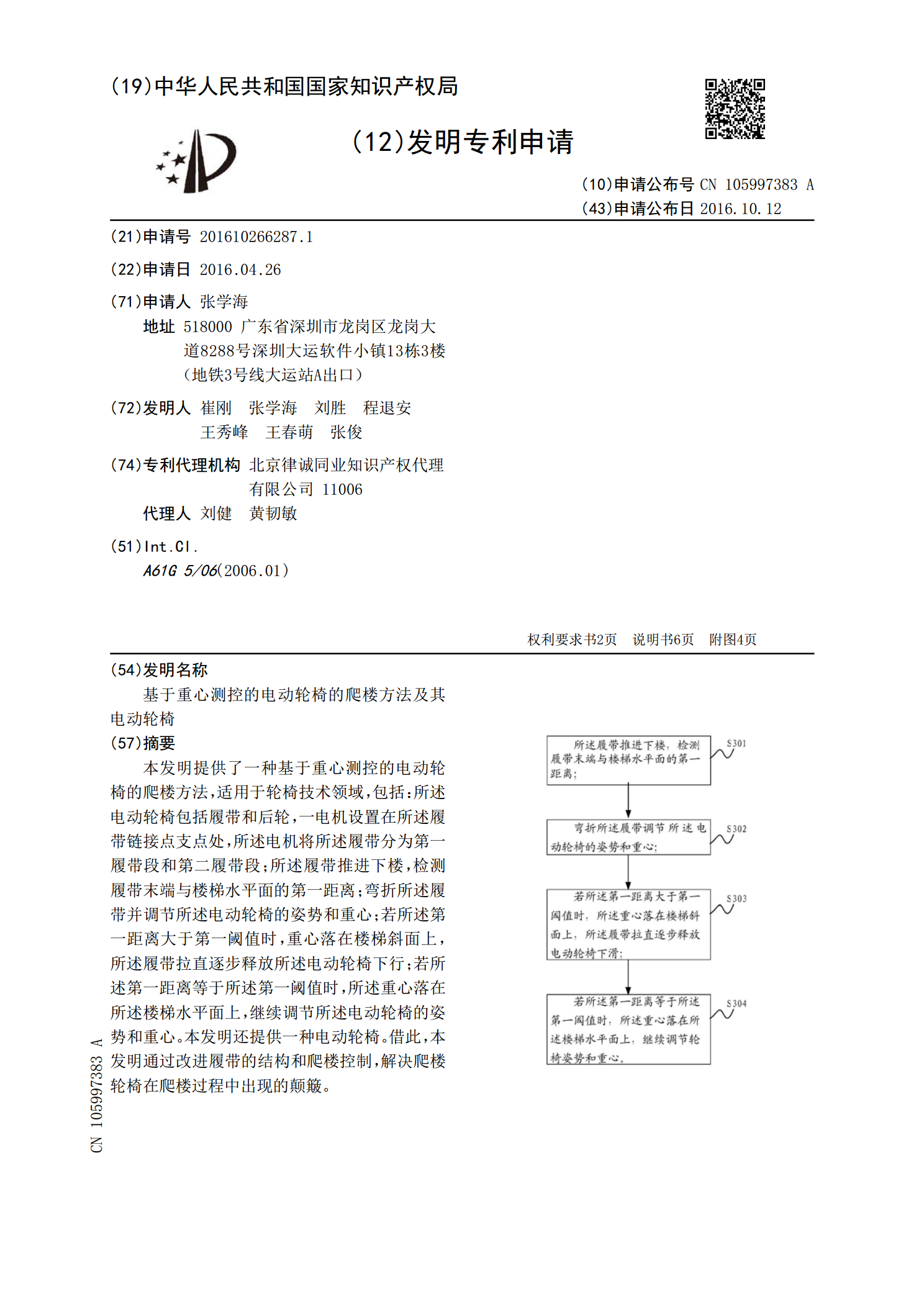
本发明提供了一种基于重心测控的电动轮椅的爬楼方法,适用于轮椅技术领域,包括:所述电动轮椅包括履带和后轮,一电机设置在所述履带链接点支点处,所述电机将所述履带分为第一履带段和第二履带段;所述履带推进下楼,检测履带末端与楼梯水平面的第一距离;弯折所述履带并调节所述电动轮椅的姿势和重心;若所述第一距离大于第一阈值时,重心落在楼梯斜面上,所述履带拉直逐步释放所述电动轮椅下行;若所述第一距离等于所述第一阈值时,所述重心落在所述楼梯水平面上,继续调节所述电动轮椅的姿势和重心。本发明还提供一种电动轮椅。借此,本发明通过