
用于检查、清洁和/或修理叶片的系统和方法.pdf

明钰****甜甜

1/10
2/10

3/10
4/10
5/10

6/10
7/10

8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

用于检查、清洁和/或修理叶片的系统和方法.pdf
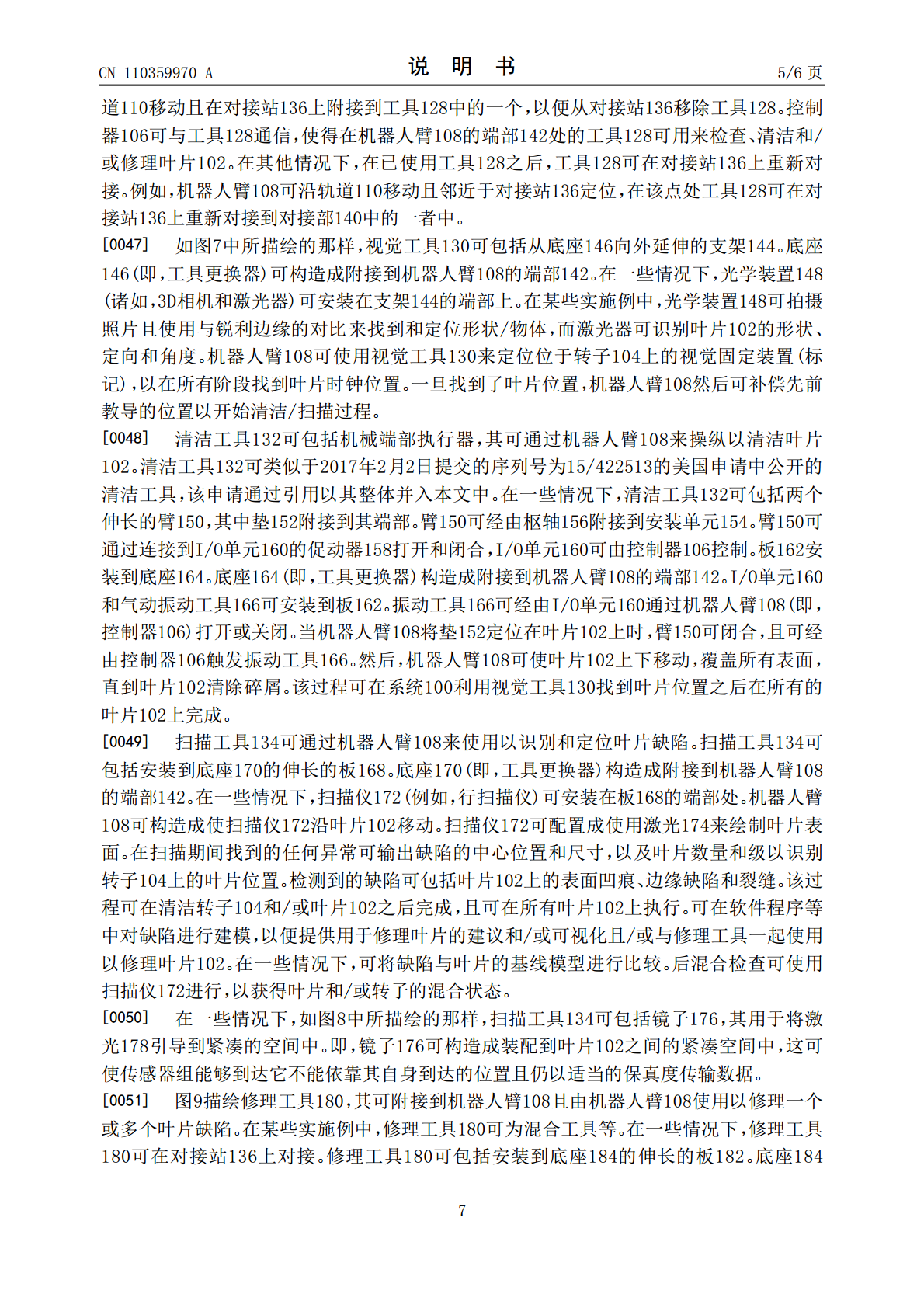
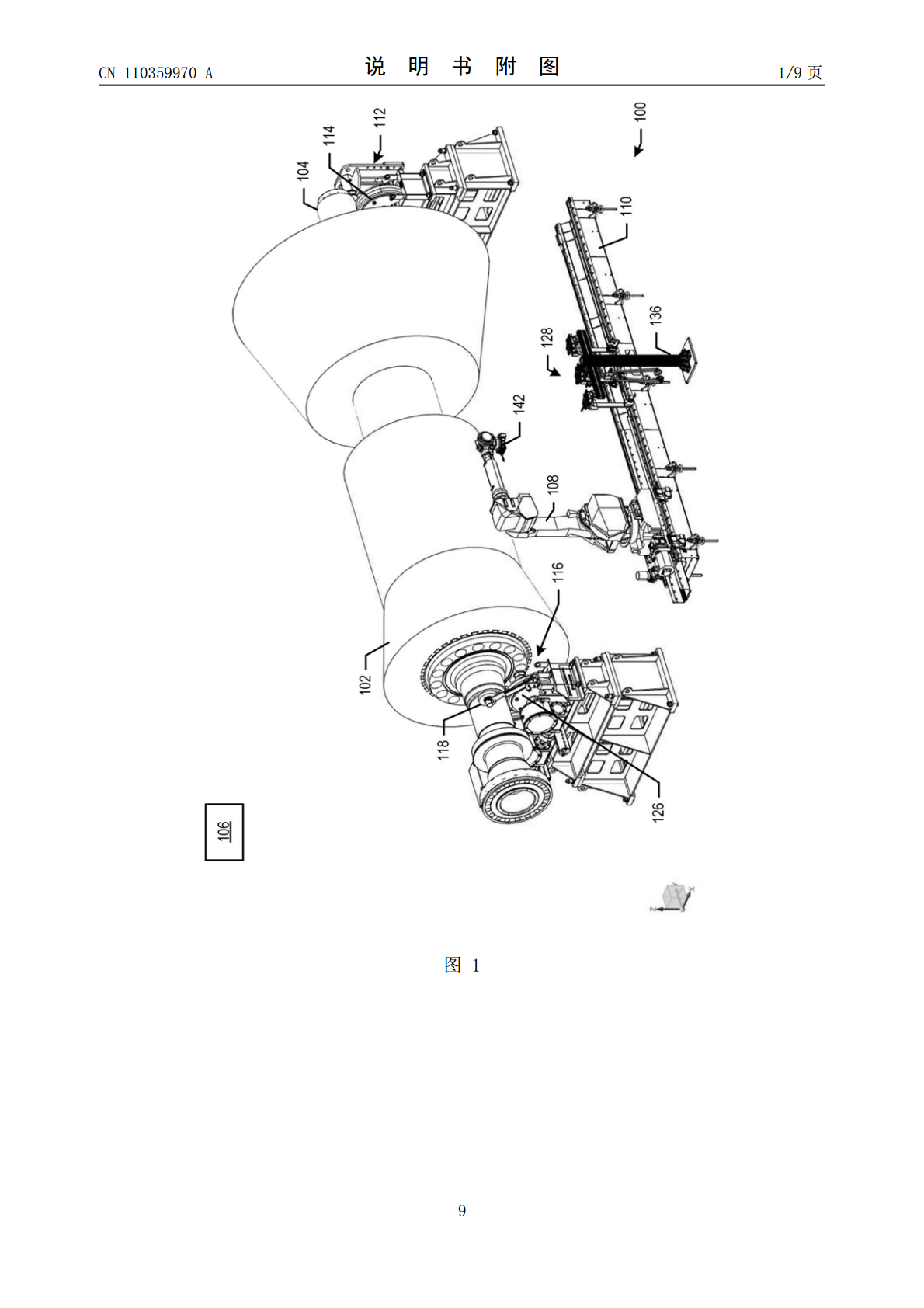
一种用于检查、清洁和/或修理附接到燃气涡轮发动机的转子的一个或多个叶片的系统。该系统包括:邻近于转子设置的轨道;能够沿轨道移动的机械臂;能够附接到机械臂的多个工具;以及控制器,其配置成控制附接到机械臂的工具中的至少一个在一个或多个叶片周围的位置。

用于检查涡轮叶片的系统和方法.pdf
本申请涉及用于检查涡轮叶片的系统和方法。其中,一种系统用于针对表面特征检查转子叶片的表面。该系统可包括具有可动臂和安装在可动臂上的扫描仪的组件。成排的转子叶片可定位在组件附近用于检查。成排的转子叶片可包括围绕中心轴线沿周向间隔开的多个转子叶片。成排的转子叶片和组件可关于彼此移动,以便使成排的转子叶片关于组件转位。

用于冷却涡轮叶片的系统和方法.pdf
本发明涉及用于冷却涡轮叶片的系统和方法。一种系统包括涡轮叶片,涡轮叶片包括至少一个冷却槽,该至少一个冷却槽构造成沿流动方向将冷却剂从涡轮叶片的内部传输到外部。冷却槽包括联接到内部的入口,以及在入口的下游的会聚区段。会聚区段包括沿流动方向减小的第一横截面积。冷却槽还包括沿着涡轮叶片的后缘而设置的出口。
用于涡轮叶片修理的系统及方法.pdf
本发明涉及用于涡轮叶片修理的系统及方法。具体而言,本申请提供了一种修理涡轮叶片的方法。该方法可包括以下步骤:从涡轮叶片整体或部分地除去现有凹槽状叶顶、将涡轮叶片定位在增材制造系统中,以及在涡轮叶片上整体或部分地构建替换凹槽状叶顶的延伸部。
用于布置风力涡轮叶片的系统和方法.pdf
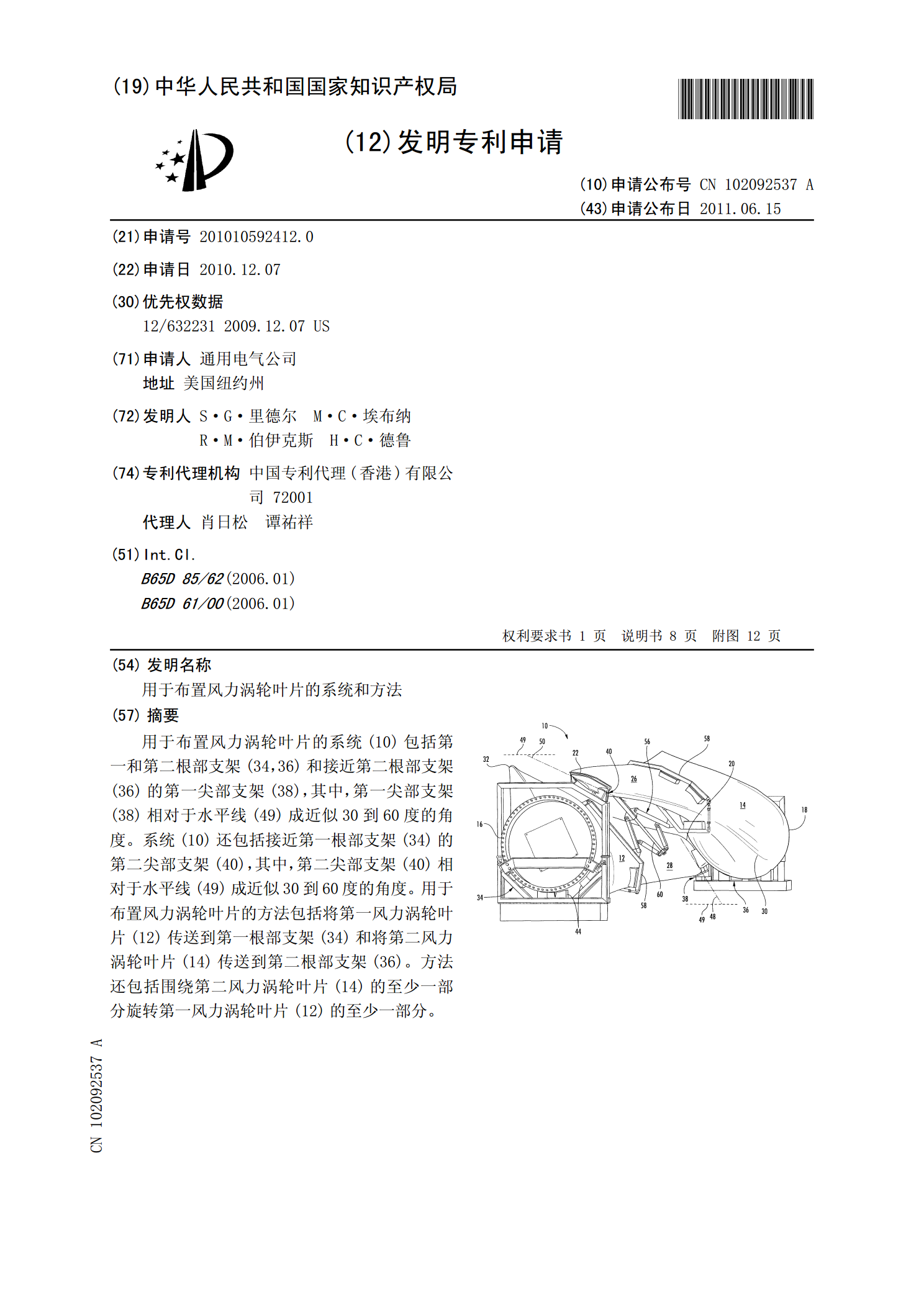
用于布置风力涡轮叶片的系统(10)包括第一和第二根部支架(34,36)和接近第二根部支架(36)的第一尖部支架(38),其中,第一尖部支架(38)相对于水平线(49)成近似30到60度的角度。系统(10)还包括接近第一根部支架(34)的第二尖部支架(40),其中,第二尖部支架(40)相对于水平线(49)成近似30到60度的角度。用于布置风力涡轮叶片的方法包括将第一风力涡轮叶片(12)传送到第一根部支架(34)和将第二风力涡轮叶片(14)传送到第二根部支架(36)。方法还包括围绕第二风力涡轮叶片(14)的至