
一种可自动调节的电动抓手.pdf

白真****ng

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种可自动调节的电动抓手.pdf
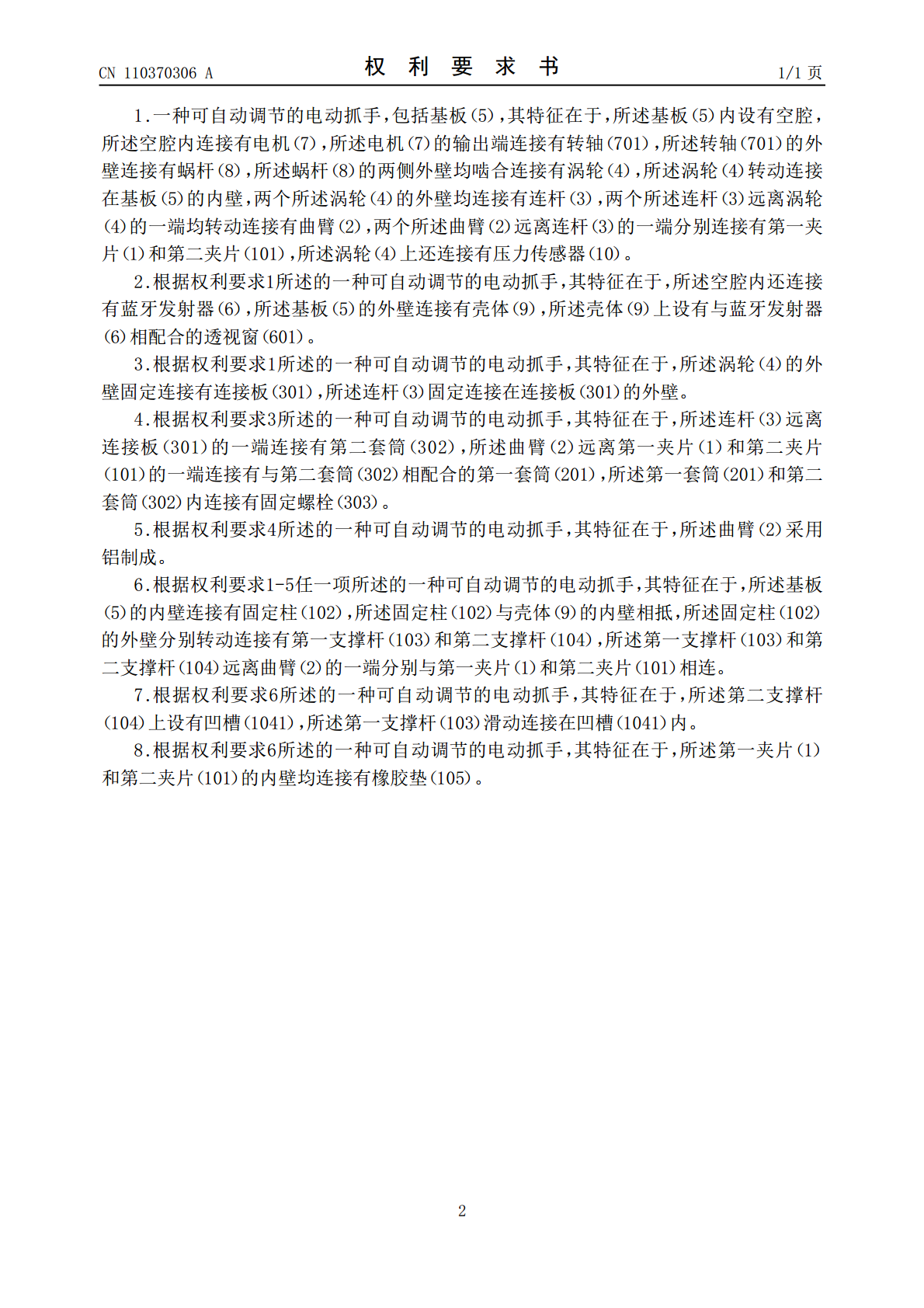
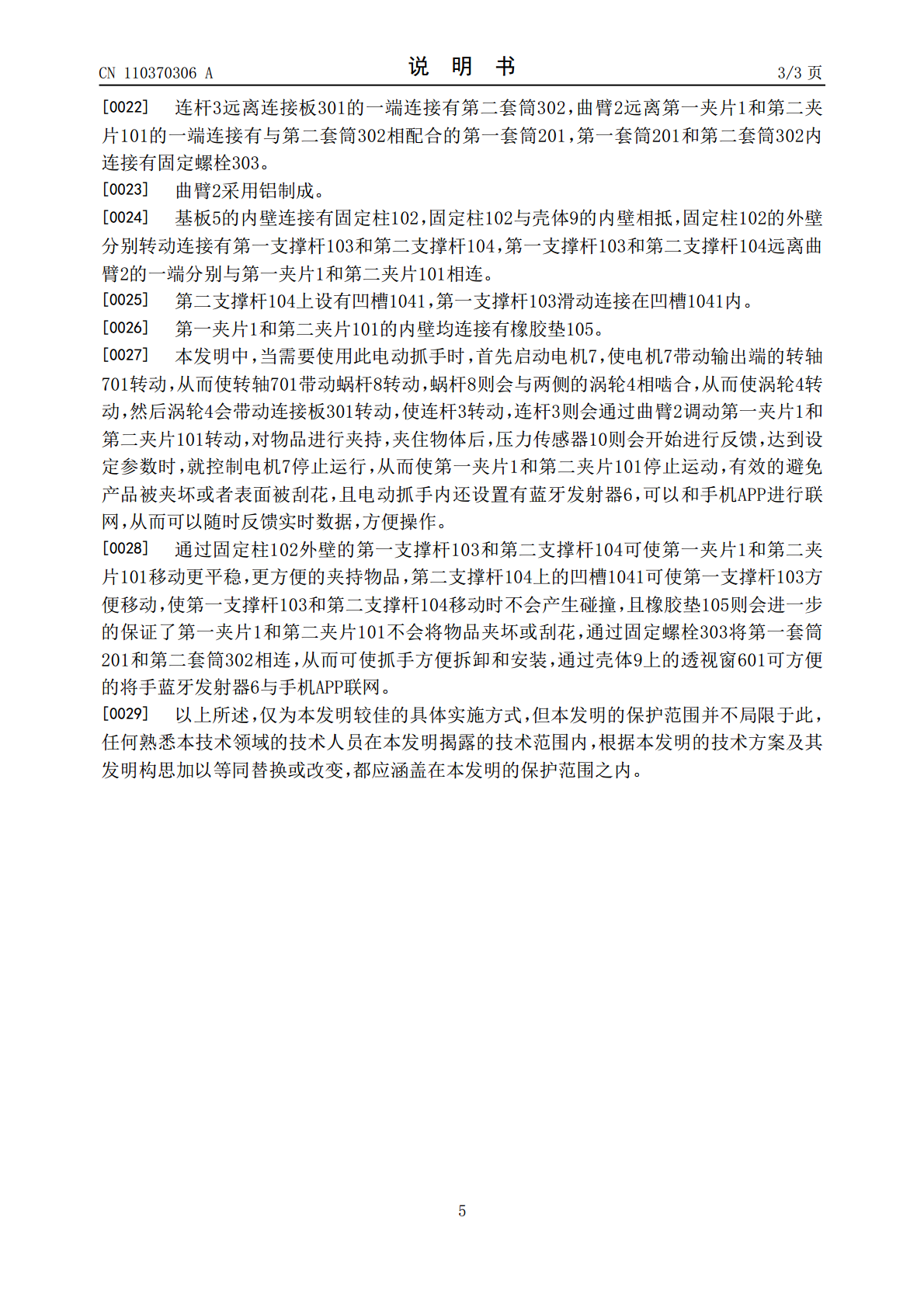
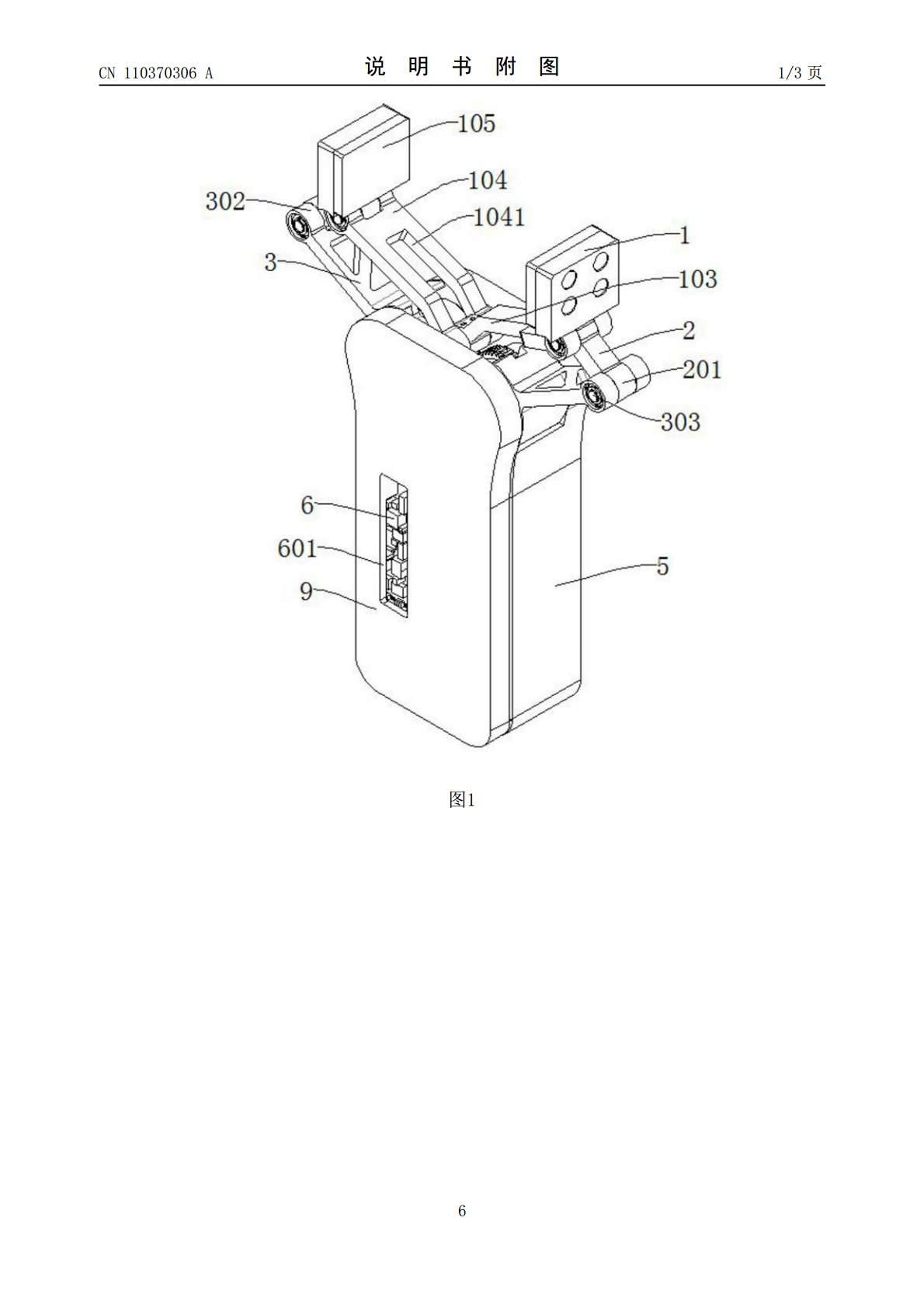
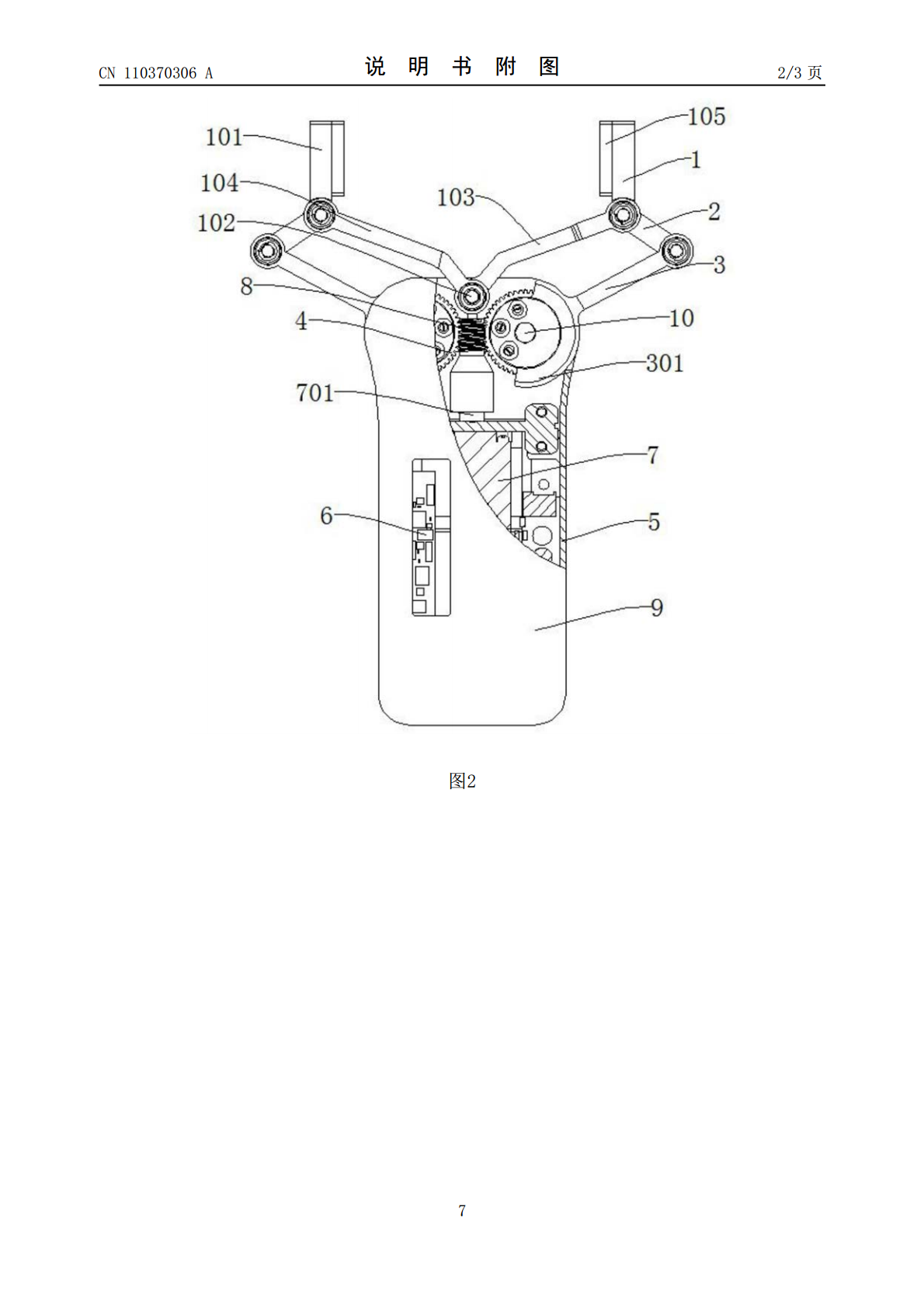
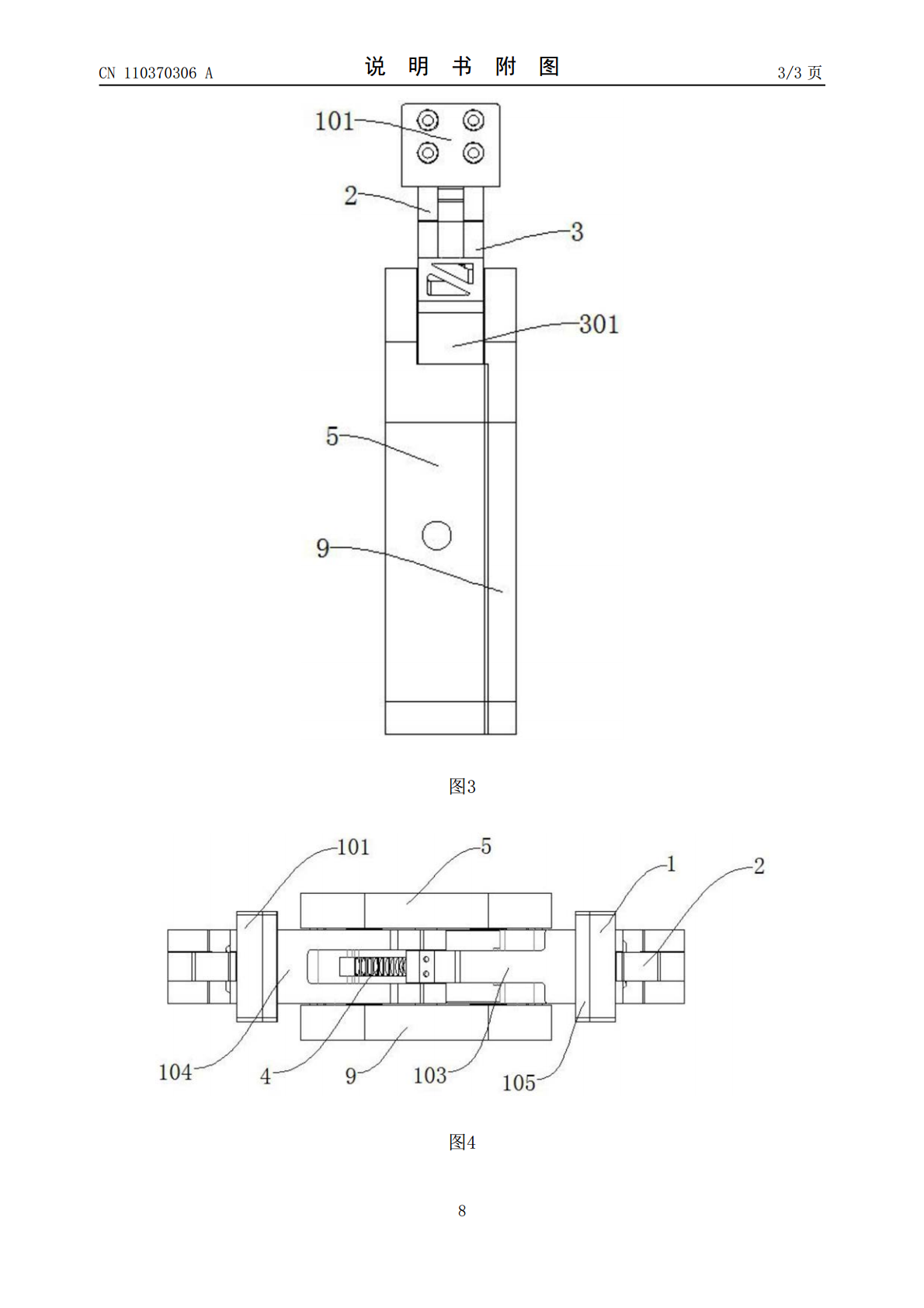
本发明公开了一种可自动调节的电动抓手,属于电动抓手技术领域。一种可自动调节的电动抓手,包括基板,所述基板内设有空腔,所述空腔内连接有电机,所述电机的输出端连接有转轴,所述转轴的外壁连接有蜗杆,所述蜗杆的两侧外壁均啮合连接有涡轮,两个所述涡轮的外壁均连接有连杆,两个所述连杆远离涡轮的一端均转动连接有曲臂,两个所述曲臂远离连杆的一端分别连接有第一夹片和第二夹片,所述涡轮上还连接有压力传感器;本发明夹住物体时,压力传感器会开始反馈,控制电机停止运行,可以有效避免产品被夹坏或者表面刮花,同时可对不同尺寸大小的物品
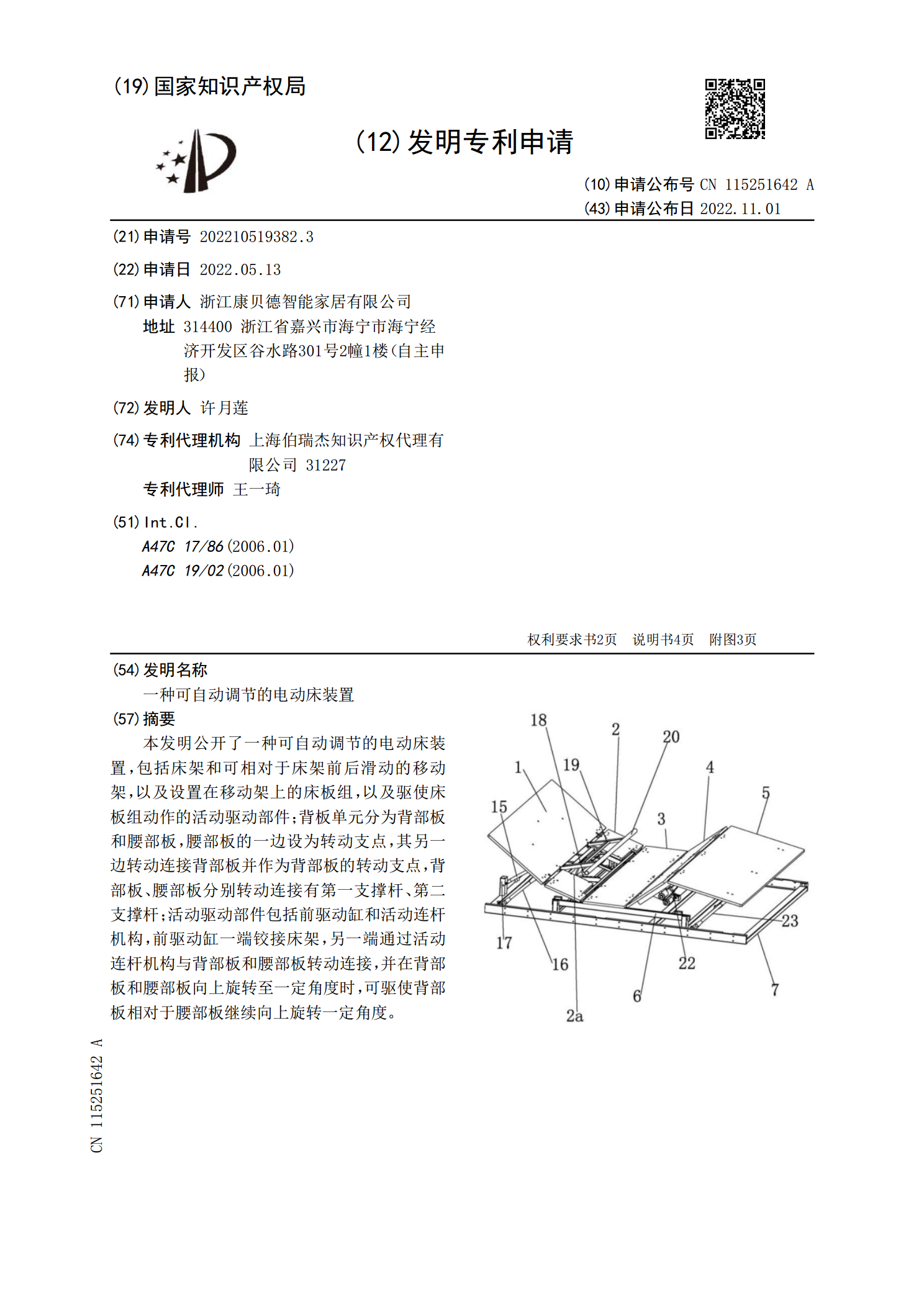
一种可自动调节的电动床装置.pdf
本发明公开了一种可自动调节的电动床装置,包括床架和可相对于床架前后滑动的移动架,以及设置在移动架上的床板组,以及驱使床板组动作的活动驱动部件;背板单元分为背部板和腰部板,腰部板的一边设为转动支点,其另一边转动连接背部板并作为背部板的转动支点,背部板、腰部板分别转动连接有第一支撑杆、第二支撑杆;活动驱动部件包括前驱动缸和活动连杆机构,前驱动缸一端铰接床架,另一端通过活动连杆机构与背部板和腰部板转动连接,并在背部板和腰部板向上旋转至一定角度时,可驱使背部板相对于腰部板继续向上旋转一定角度。

一种可自动调节口径的电动扳手.pdf
本发明公开了一种可自动调节口径的电动扳手,涉及电动工具技术领域,包括:上端盖、下端盖和把手部,上端盖包括驱动装置、若干传动齿柱和上盖板,驱动装置和传动齿柱设置在上盖板上,驱动装置与传动齿柱啮合并驱动传动齿柱旋转;下端盖包括支架部和转动夹紧部,转动夹紧部上环绕设有若干锁紧板,每个锁紧板上固定有对应的调节杆,调节杆可与传动齿柱啮合;把手部设置在支架部外侧,上端盖固定在下端盖上,把手部上还设有控制装置,压力传感器将压力信息传递给控制装置,控制装置根据压力信息调节锁紧板的位置;本发明通过驱动装置直接驱动若干传动齿

一种可自动调节的靠垫.pdf
一种可自动调节的靠垫,靠垫固定在椅子的固定装置,其特征在于,该靠垫包括蜗轮(1)、滑动式调节的部分(2)、丝杠(3)、蜗杆(4)、带动蜗杆旋转的电机驱动装置以及以上机构所依附的外壳部分(5),其中:装配电机驱动装置连接控制电路,并设置有红外传感器装置;红外传感器装置根据人体与靠垫的可滑动式调节的部分(2)接触或者不接触,实现控制电路断开或者接通,提供控制电动机的停止或开动,控制电动机为蜗轮、蜗杆装置提供动力以控制其转动与换向;当蜗轮(1)和蜗杆(4)运动时,蜗轮(1)带动与其连接的丝杠(3)旋转;通过丝杠
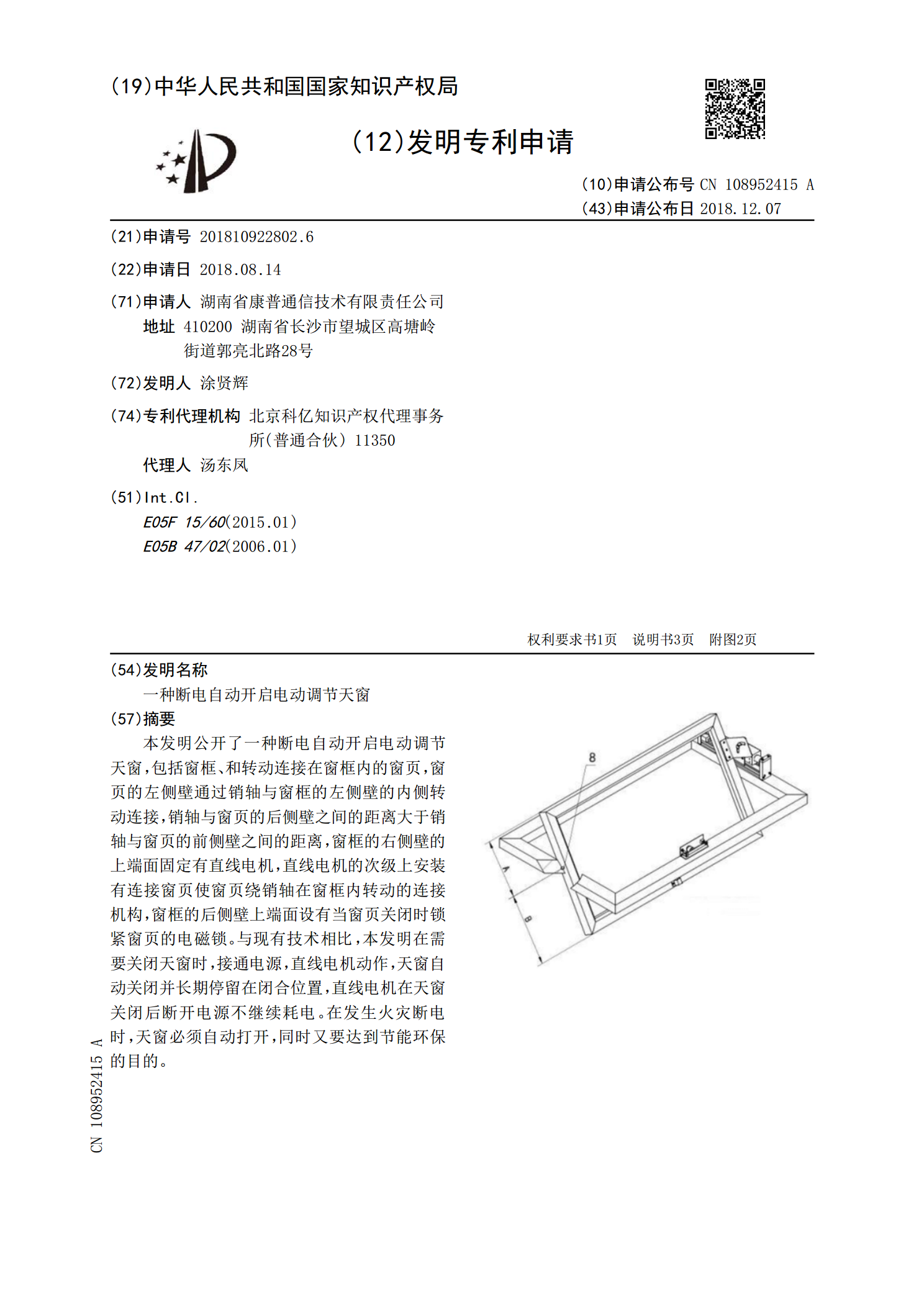
一种断电自动开启电动调节天窗.pdf
本发明公开了一种断电自动开启电动调节天窗,包括窗框、和转动连接在窗框内的窗页,窗页的左侧壁通过销轴与窗框的左侧壁的内侧转动连接,销轴与窗页的后侧壁之间的距离大于销轴与窗页的前侧壁之间的距离,窗框的右侧壁的上端面固定有直线电机,直线电机的次级上安装有连接窗页使窗页绕销轴在窗框内转动的连接机构,窗框的后侧壁上端面设有当窗页关闭时锁紧窗页的电磁锁。与现有技术相比,本发明在需要关闭天窗时,接通电源,直线电机动作,天窗自动关闭并长期停留在闭合位置,直线电机在天窗关闭后断开电源不继续耗电。在发生火灾断电时,天窗必须自