
一种双馈式变速抽水蓄能机组的多模型预测控制方法.pdf

佳晨****ng

1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种双馈式变速抽水蓄能机组的多模型预测控制方法.pdf
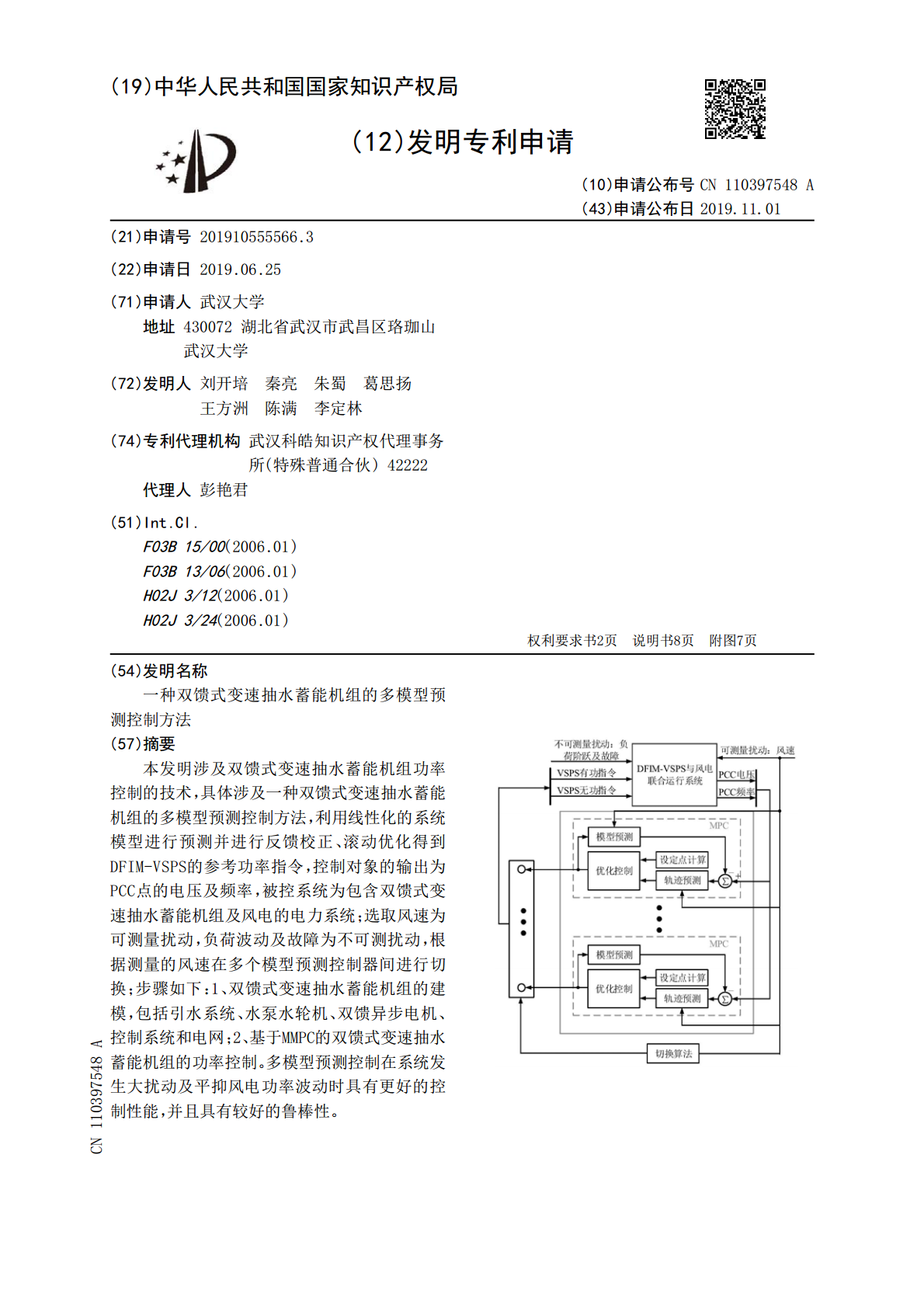
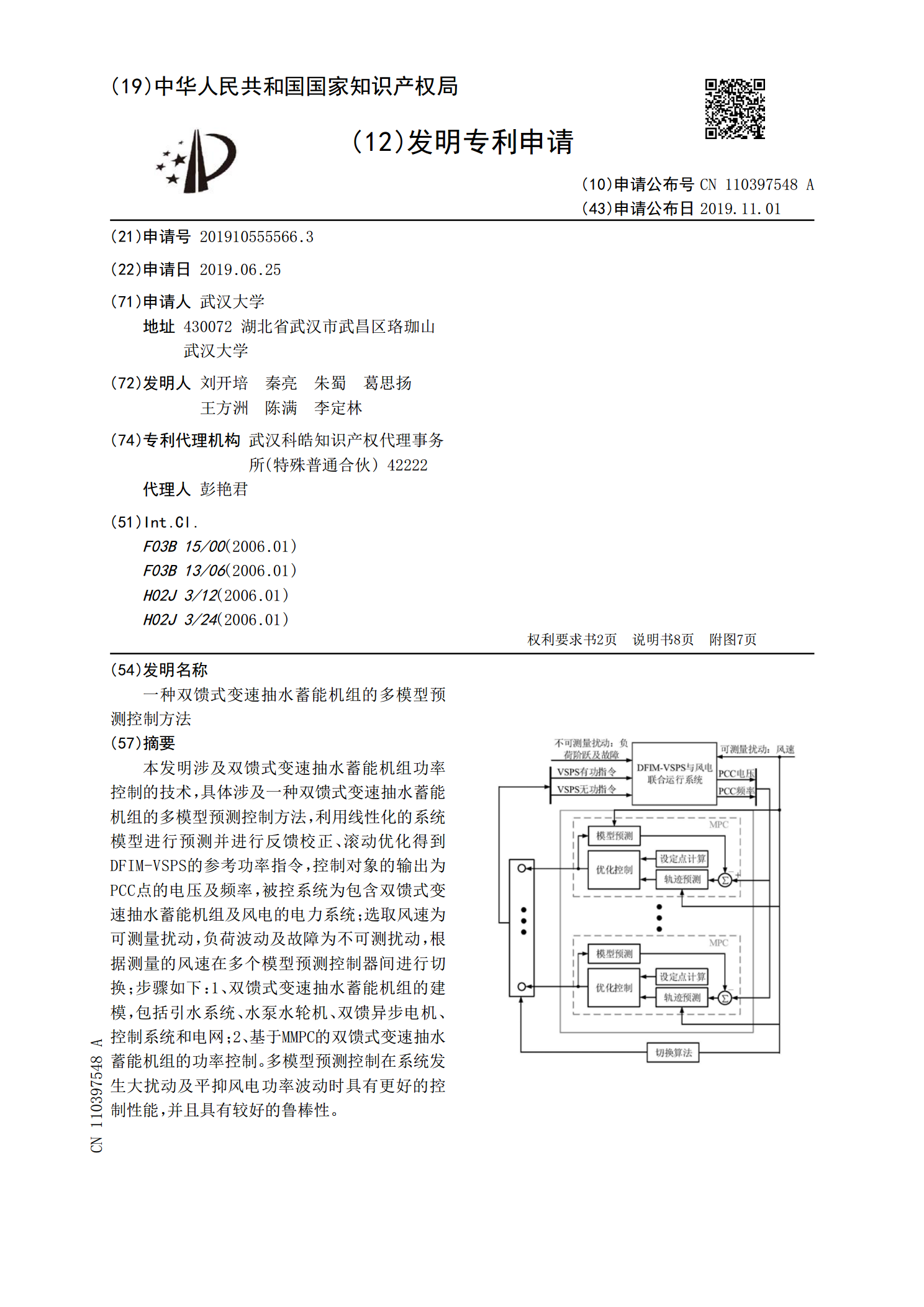
本发明涉及双馈式变速抽水蓄能机组功率控制的技术,具体涉及一种双馈式变速抽水蓄能机组的多模型预测控制方法,利用线性化的系统模型进行预测并进行反馈校正、滚动优化得到DFIM‑VSPS的参考功率指令,控制对象的输出为PCC点的电压及频率,被控系统为包含双馈式变速抽水蓄能机组及风电的电力系统;选取风速为可测量扰动,负荷波动及故障为不可测扰动,根据测量的风速在多个模型预测控制器间进行切换;步骤如下:1、双馈式变速抽水蓄能机组的建模,包括引水系统、水泵水轮机、双馈异步电机、控制系统和电网;2、基于MMPC的双馈式变速
含双馈型抽水蓄能机组系统频率控制方法、设备及介质.pdf
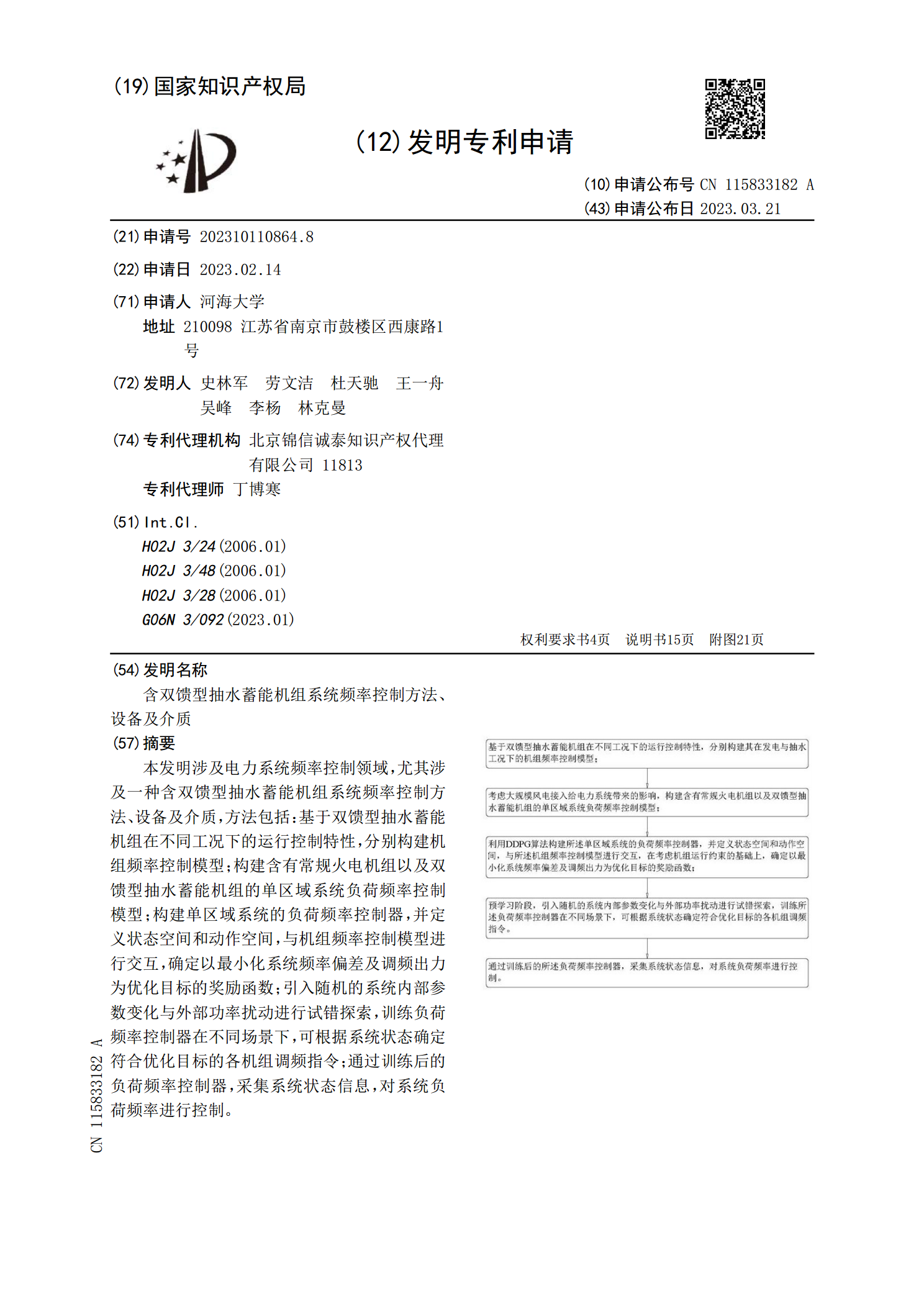
本发明涉及电力系统频率控制领域,尤其涉及一种含双馈型抽水蓄能机组系统频率控制方法、设备及介质,方法包括:基于双馈型抽水蓄能机组在不同工况下的运行控制特性,分别构建机组频率控制模型;构建含有常规火电机组以及双馈型抽水蓄能机组的单区域系统负荷频率控制模型;构建单区域系统的负荷频率控制器,并定义状态空间和动作空间,与机组频率控制模型进行交互,确定以最小化系统频率偏差及调频出力为优化目标的奖励函数;引入随机的系统内部参数变化与外部功率扰动进行试错探索,训练负荷频率控制器在不同场景下,可根据系统状态确定符合优化目标

变速抽水蓄能机组在区域电网中的优化调度模型构建方法.pdf
本发明公开一种变速抽水蓄能机组在区域电网中的优化调度模型构建方法,采用容量分割的方法建立变速抽水蓄能电站全天的多应用模式优化配置模型,模型的优化目标为系统最小经济成本,约束条件的构建包括变速抽水蓄能机组调频和备用预留容量约束、变速抽水蓄能机组调频和备用预留能量约束、功率‑电能等式约束;在调度模型的构建中,主要考虑变速抽水蓄能机组的抽水发电功率约束、电能约束、功率‑电能转化损耗约束、爬坡约束和备用约束。此种模型构建方法可为电网调峰和调频提供精细化调节手段,提高电网的安全稳定运行水平和资源利用率。
变速抽水蓄能机组的动态调节方法、装置和存储介质.pdf
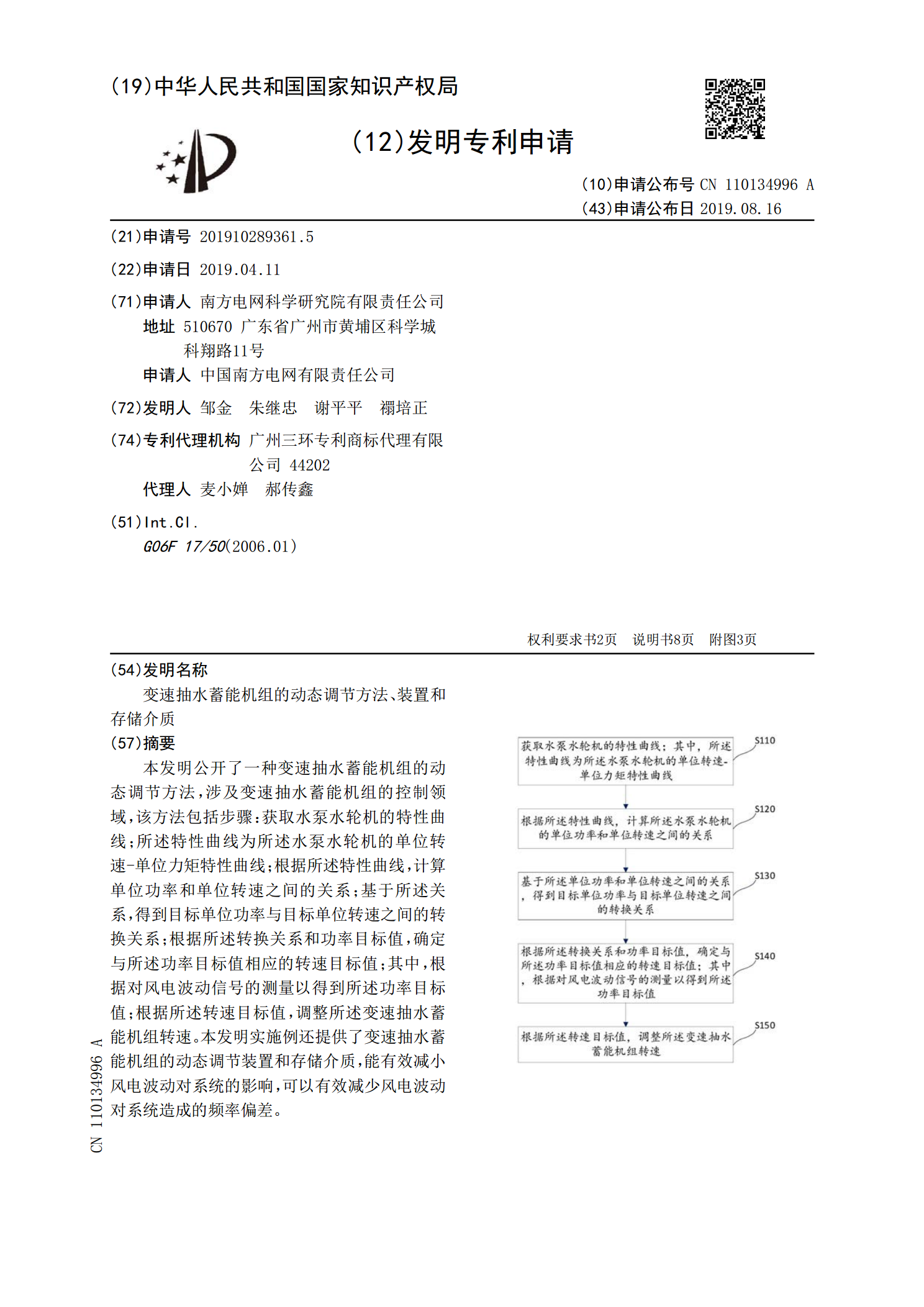
本发明公开了一种变速抽水蓄能机组的动态调节方法,涉及变速抽水蓄能机组的控制领域,该方法包括步骤:获取水泵水轮机的特性曲线;所述特性曲线为所述水泵水轮机的单位转速‑单位力矩特性曲线;根据所述特性曲线,计算单位功率和单位转速之间的关系;基于所述关系,得到目标单位功率与目标单位转速之间的转换关系;根据所述转换关系和功率目标值,确定与所述功率目标值相应的转速目标值;其中,根据对风电波动信号的测量以得到所述功率目标值;根据所述转速目标值,调整所述变速抽水蓄能机组转速。本发明实施例还提供了变速抽水蓄能机组的动态调节装
变速抽水蓄能机组水泵工况的寻优方法、装置及设备.pdf
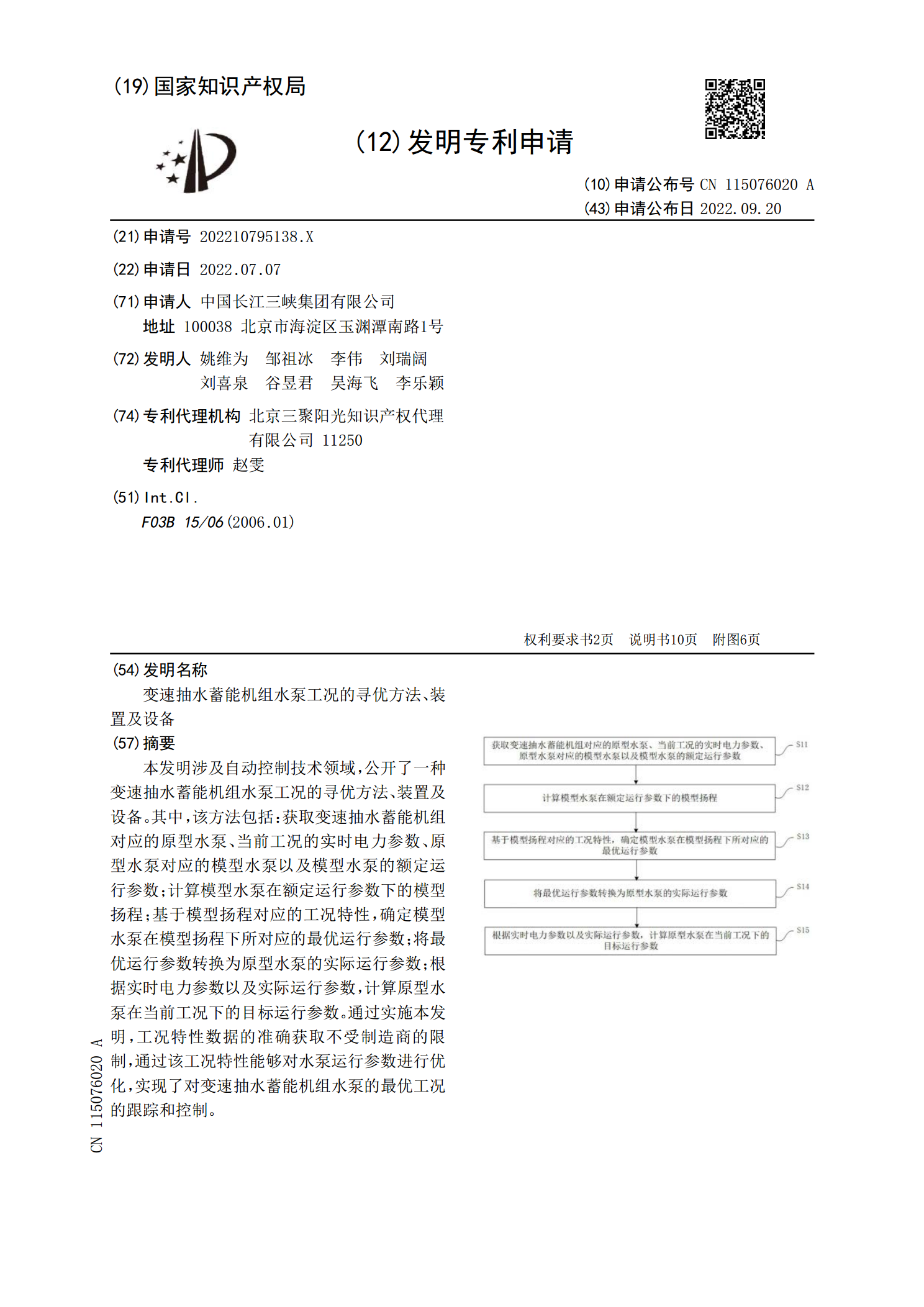
本发明涉及自动控制技术领域,公开了一种变速抽水蓄能机组水泵工况的寻优方法、装置及设备。其中,该方法包括:获取变速抽水蓄能机组对应的原型水泵、当前工况的实时电力参数、原型水泵对应的模型水泵以及模型水泵的额定运行参数;计算模型水泵在额定运行参数下的模型扬程;基于模型扬程对应的工况特性,确定模型水泵在模型扬程下所对应的最优运行参数;将最优运行参数转换为原型水泵的实际运行参数;根据实时电力参数以及实际运行参数,计算原型水泵在当前工况下的目标运行参数。通过实施本发明,工况特性数据的准确获取不受制造商的限制,通过该工