
ABB工业机器人的手动操作.pptx

骑着****猪猪

1/10
2/10

3/10
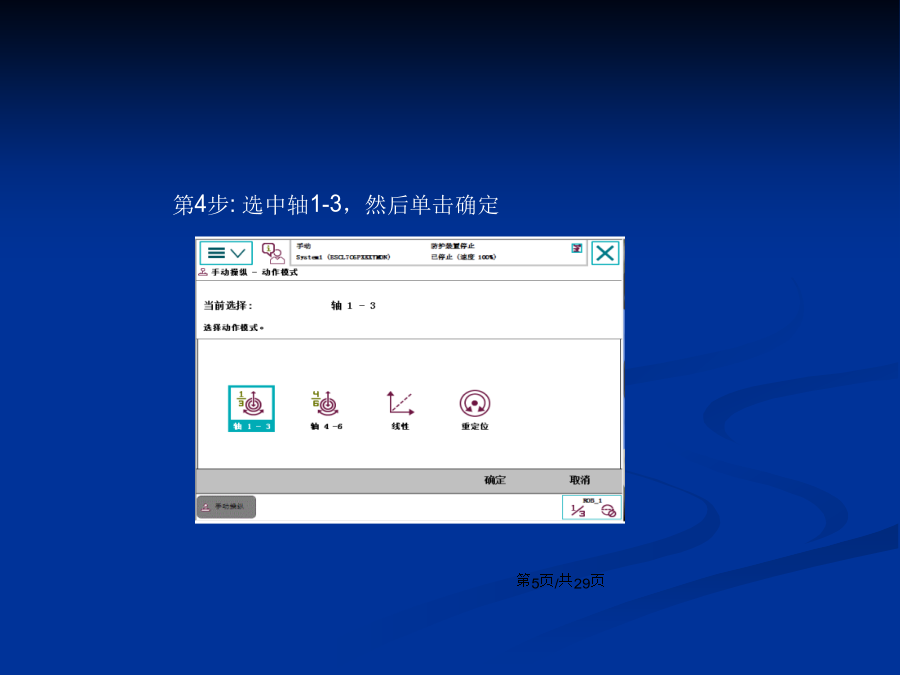
4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

ABB工业机器人的手动操作.pptx
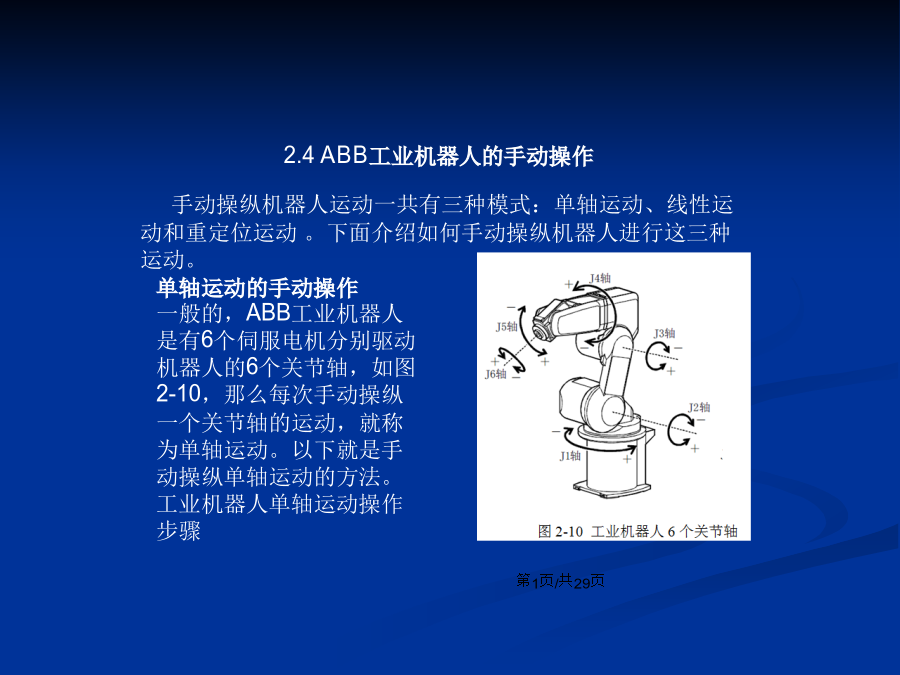
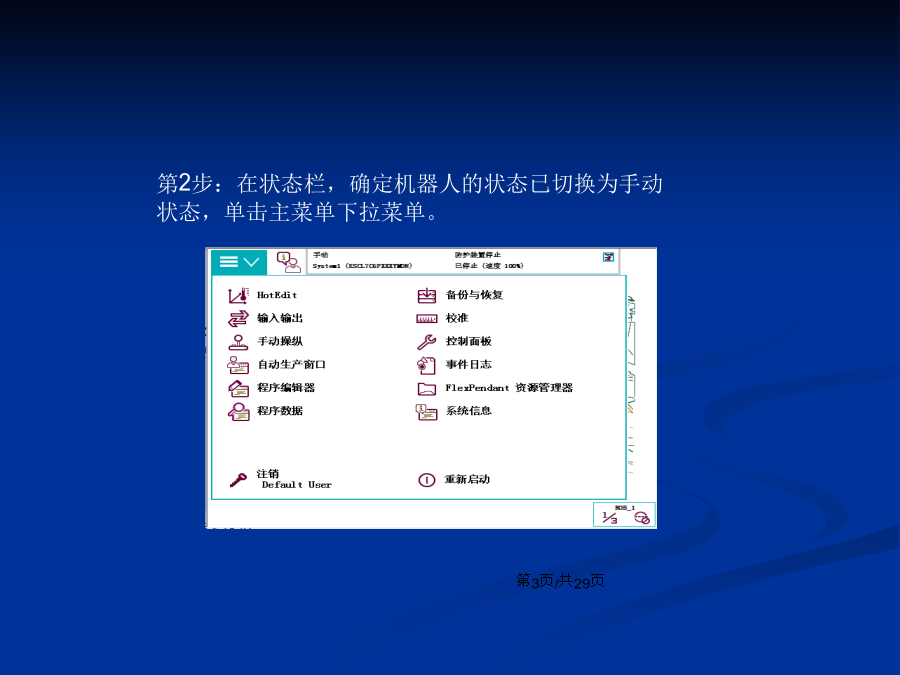
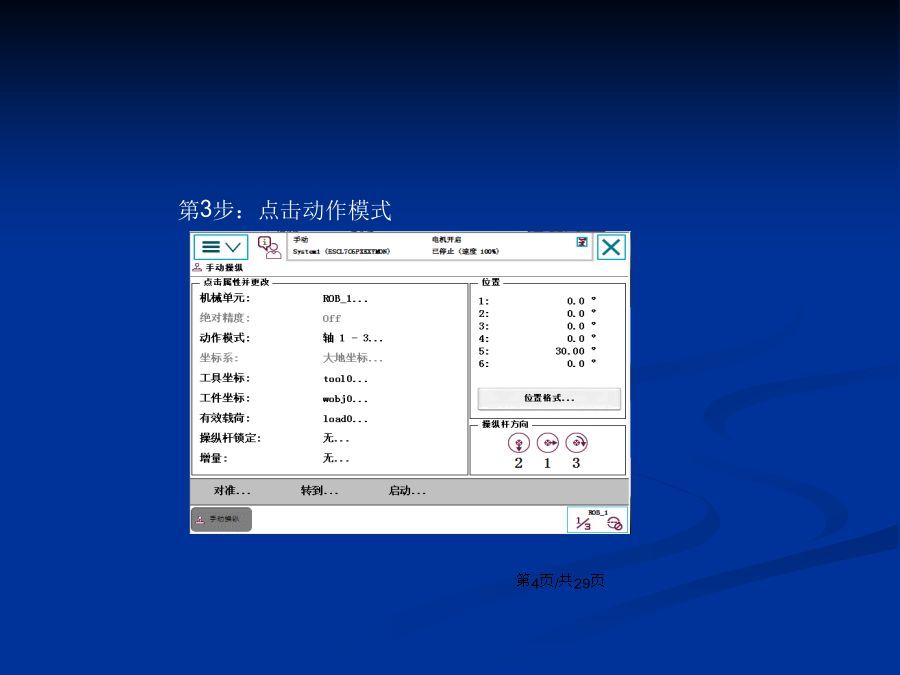
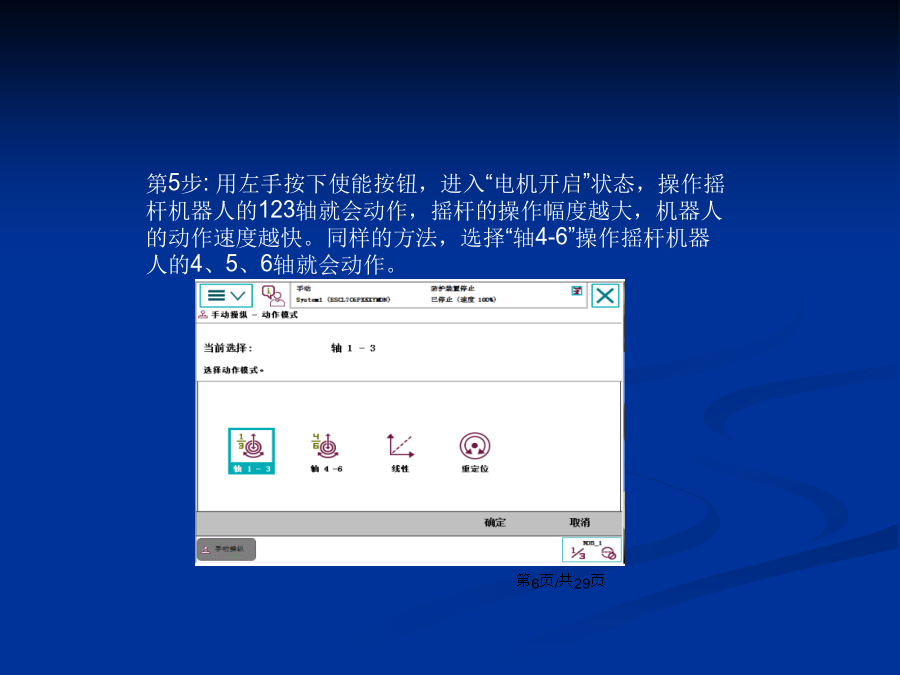
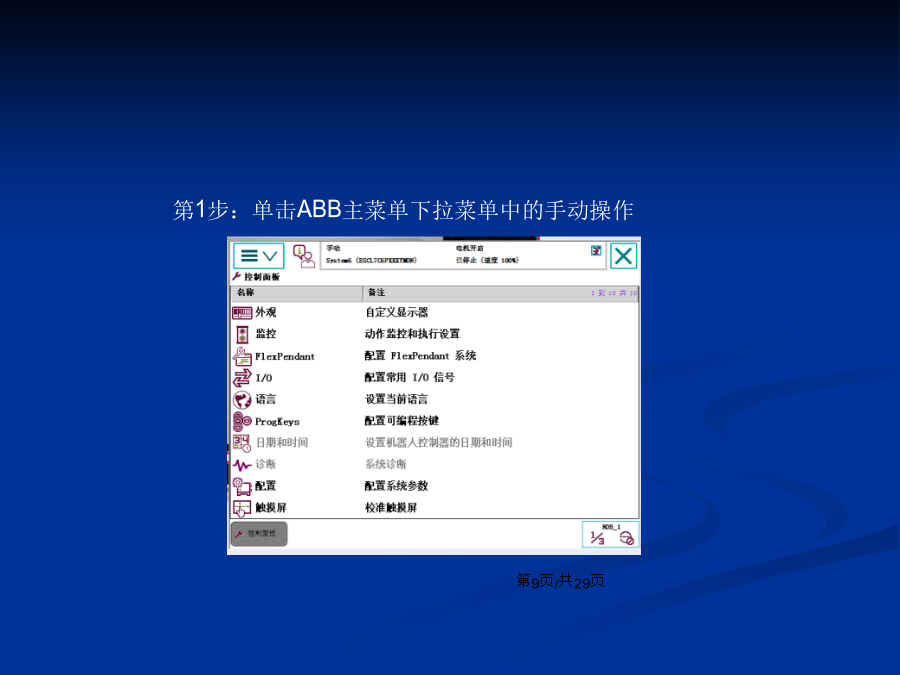
会计学2.4ABB工业机器人的手动操作工业机器人单轴运动操作步骤:第1步:接通电源,把机器人状态钥匙切换到中间的手动限速状态第2步:在状态栏,确定机器人的状态已切换为手动状态,单击主菜单下拉菜单。第3步:点击动作模式第4步:选中轴1-3,然后单击确定第5步:用左手按下使能按钮,进入“电机开启”状态,操作摇杆机器人的123轴就会动作,摇杆的操作幅度越大,机器人的动作速度越快。同样的方法,选择“轴4-6”操作摇杆机器人的4、5、6轴就会动作。其中操作杆方向栏的箭头和数字代表各个轴的运动时的正方向线性运动的手动

ABB工业机器人的手动操作.pptx
会计学2.4ABB工业机器人的手动操作工业机器人单轴运动操作步骤:第1步:接通电源,把机器人状态钥匙切换到中间的手动限速状态第2步:在状态栏,确定机器人的状态已切换为手动状态,单击主菜单下拉菜单。第3步:点击动作模式第4步:选中轴1-3,然后单击确定第5步:用左手按下使能按钮,进入“电机开启”状态,操作摇杆机器人的123轴就会动作,摇杆的操作幅度越大,机器人的动作速度越快。同样的方法,选择“轴4-6”操作摇杆机器人的4、5、6轴就会动作。其中操作杆方向栏的箭头和数字代表各个轴的运动时的正方向线性运动的手动

ABB机器人的手动操作.doc
ABB[a]/-J-3ABB机器人得手动操作3、1任务目标掌握手动操作机器人运动得三种模式。使用“增量”模式来控制机器人得运动。熟练使用手动操纵得快捷方式。掌握ABB机器人转数计数器更新操作。3、2任务描述手动操纵机器人运动一共有三种模式:单轴运动、线性运动与重定位运动。如何使用这三种模式手动操作机器人运动就是项目得主要内容。建立一个工作站,ABB型号为IRB120,Y轴上建模长方体,长200mm,宽200mm,高400mm,在长方体得内角上进行重定位运动,之后恢复到机械远点。(手动操作练习需要教师指导,

ABB机器人的手动操作.docx
资料收集于网络如有侵权请联系网站删除谢谢资料收集于网络如有侵权请联系网站删除谢谢精品文档精品文档资料收集于网络如有侵权请联系网站删除谢谢精品文档ABB[a]/-J-3ABB机器人的手动操作3.1任务目标掌握手动操作机器人运动的三种模式。使用“增量”模式来控制机器人的运动。熟练使用手动操纵的快捷方式。掌握ABB机器人转数计数器更新操作。3.2任务描述手动操纵机器人运动一共有三种模式:单轴运动、线性运动和重定位运动。如何使用这三种模式手动操作机器人运动是项目的主要内容。建立一个工作站,ABB型号为IRB120

ABB机器人的手动操作.doc
ABB[a]/-J-3ABB机器人得手动操作3、1任务目标掌握手动操作机器人运动得三种模式。使用“增量”模式来控制机器人得运动。熟练使用手动操纵得快捷方式。掌握ABB机器人转数计数器更新操作。3、2任务描述手动操纵机器人运动一共有三种模式:单轴运动、线性运动与重定位运动。如何使用这三种模式手动操作机器人运动就是项目得主要内容。建立一个工作站,ABB型号为IRB120,Y轴上建模长方体,长200mm,宽200mm,高400mm,在长方体得内角上进行重定位运动,之后恢复到机械远点。(手动操作练习需要教师指导,