
一种背包式仿生颈肩按摩器.pdf

景山****魔王

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种背包式仿生颈肩按摩器.pdf
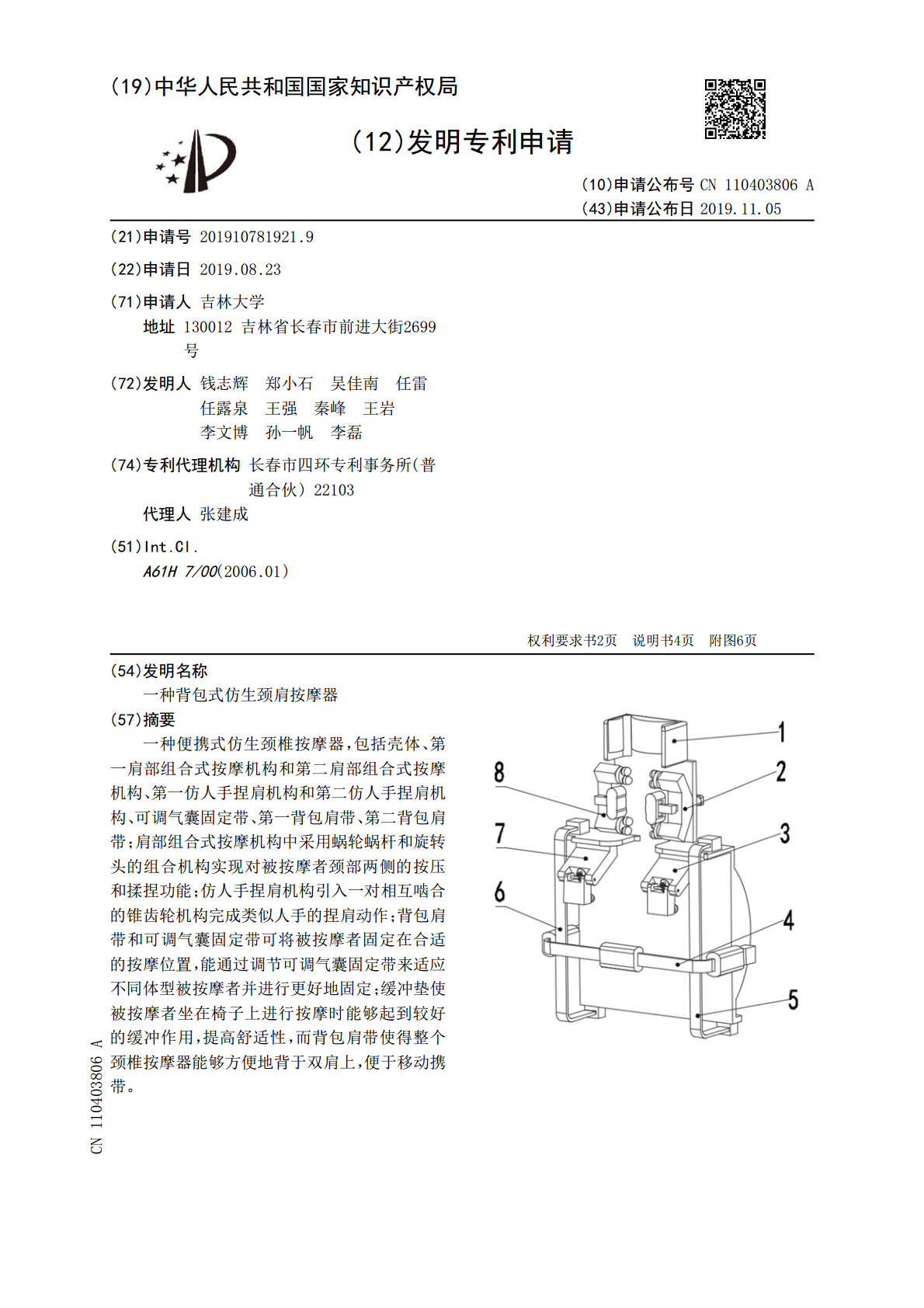
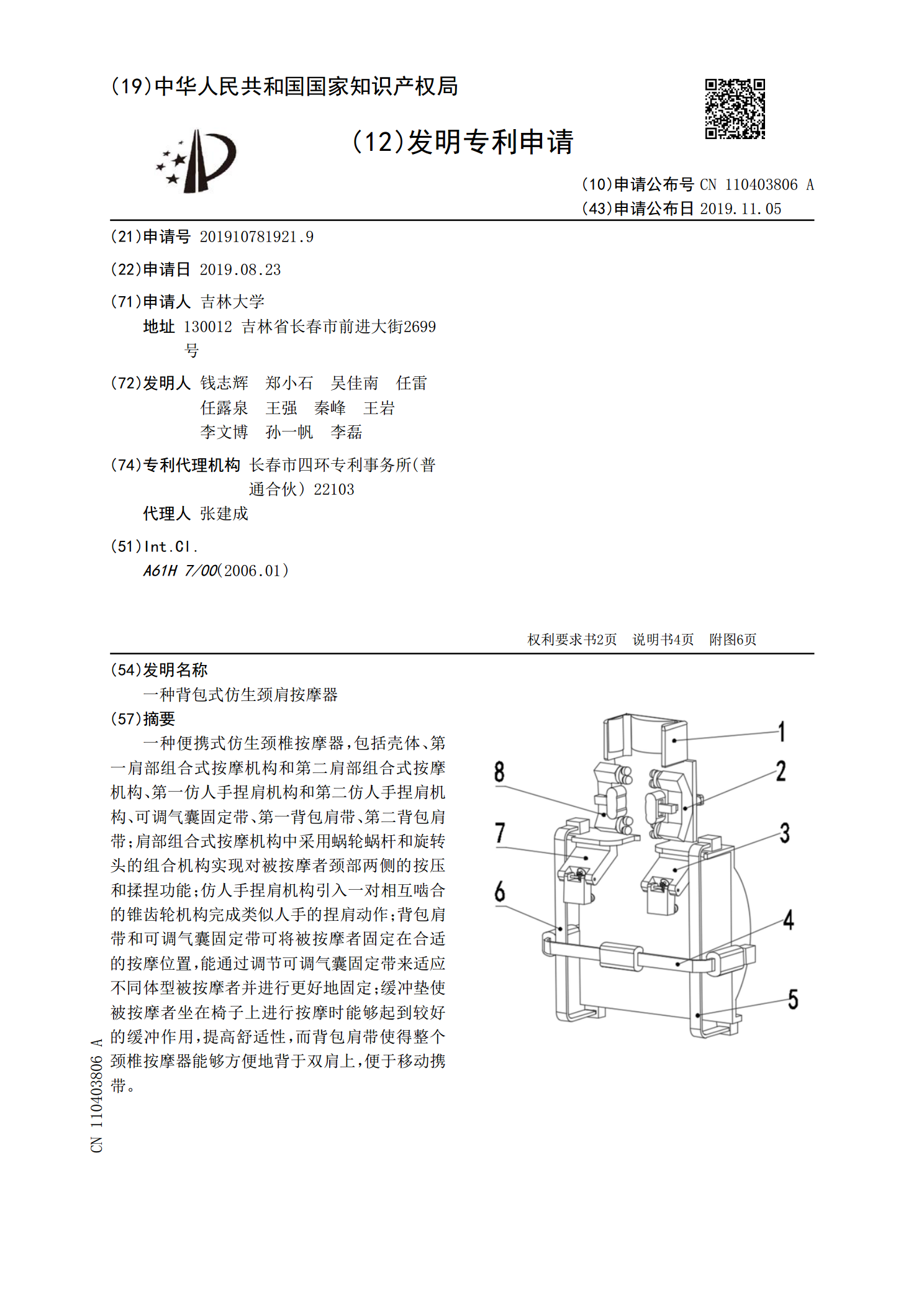
一种便携式仿生颈椎按摩器,包括壳体、第一肩部组合式按摩机构和第二肩部组合式按摩机构、第一仿人手捏肩机构和第二仿人手捏肩机构、可调气囊固定带、第一背包肩带、第二背包肩带;肩部组合式按摩机构中采用蜗轮蜗杆和旋转头的组合机构实现对被按摩者颈部两侧的按压和揉捏功能;仿人手捏肩机构引入一对相互啮合的锥齿轮机构完成类似人手的捏肩动作;背包肩带和可调气囊固定带可将被按摩者固定在合适的按摩位置,能通过调节可调气囊固定带来适应不同体型被按摩者并进行更好地固定;缓冲垫使被按摩者坐在椅子上进行按摩时能够起到较好的缓冲作用,提高
一种肩颈拿捏按摩器.pdf
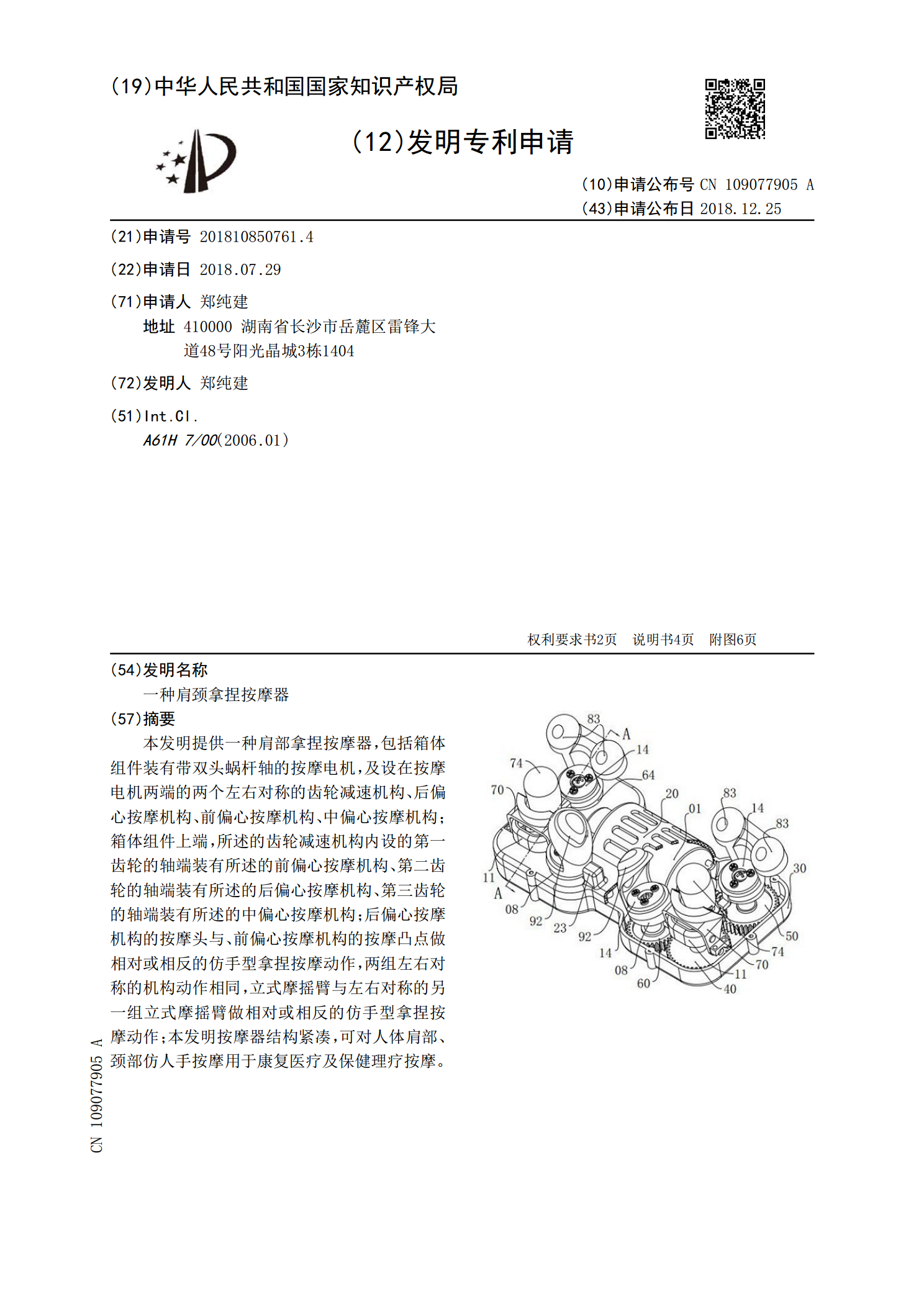
本发明提供一种肩部拿捏按摩器,包括箱体组件装有带双头蜗杆轴的按摩电机,及设在按摩电机两端的两个左右对称的齿轮减速机构、后偏心按摩机构、前偏心按摩机构、中偏心按摩机构;箱体组件上端,所述的齿轮减速机构内设的第一齿轮的轴端装有所述的前偏心按摩机构、第二齿轮的轴端装有所述的后偏心按摩机构、第三齿轮的轴端装有所述的中偏心按摩机构;后偏心按摩机构的按摩头与、前偏心按摩机构的按摩凸点做相对或相反的仿手型拿捏按摩动作,两组左右对称的机构动作相同,立式摩摇臂与左右对称的另一组立式摩摇臂做相对或相反的仿手型拿捏按摩动作;本

一种按压、揉捏式肩颈部按摩器.pdf
本发明公开了一种按压、揉捏式肩颈部按摩器,包括支撑作用的安装架和提供动力的驱动电机;驱动电机安装于机构安装架上,驱动电机一侧的输出轴与一蜗杆传动连接,所述的蜗杆与通过揉捏驱动转轴安装于安装架上的揉捏驱动齿轮组啮合传动;所述的揉捏驱动齿轮组由两个相互啮合的揉捏驱动齿轮组成;所述的揉捏驱动齿轮上同轴安装有揉捏偏心块;在揉捏驱动齿轮和揉捏偏心块上分别安装有限制揉捏驱动齿轮和揉捏偏心块上下移动的齿轮固定架和偏心块固定架;揉捏偏心块上安装有柔性按摩手,两个柔性按摩手夹持一侧肩膀;所述驱动电机的另一侧输出轴与一通过刮

手抓仿生式按摩器.pdf
本发明公开了一种手抓仿生式按摩器,包括壳体、电源、多个驱动轮、多个按摩组件、多个衔接件,上述驱动轮、上述衔接件均设置在壳体内,上述驱动轮均连接上述衔接件,上述驱动轮驱使上述衔接件朝向上述壳体的中轴线并且以垂直于上述壳体的中轴线做往复运动,上述壳体设置有多个条形槽暴露上述衔接件,上述按摩组件均设置在上述壳体外,并且固定在上述衔接件。本发明的有益效果在于,以仿生手抓的方式来完成按摩,其效果较传统的按摩器较佳。
一种单肩背包.pdf
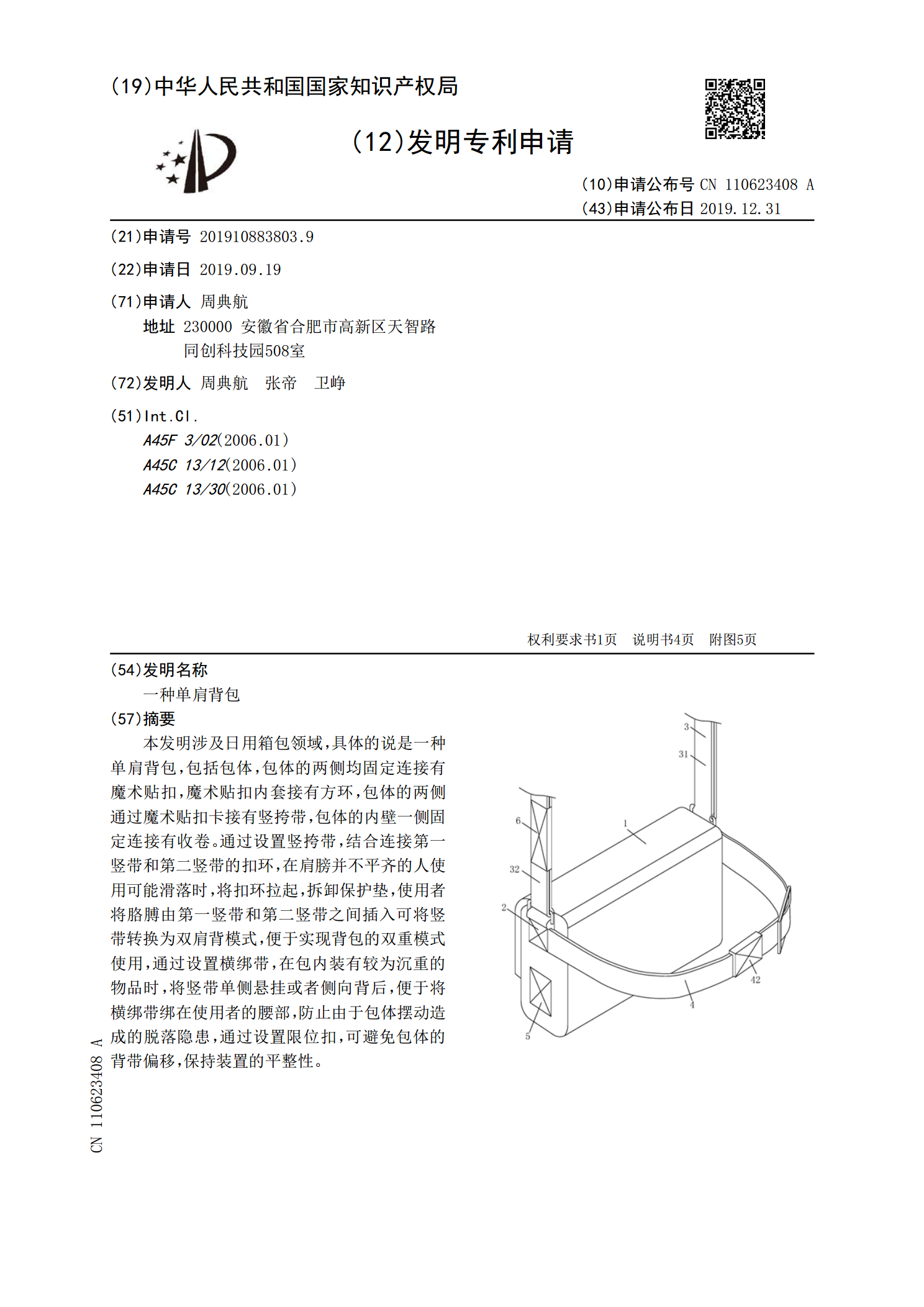
本发明涉及日用箱包领域,具体的说是一种单肩背包,包括包体,包体的两侧均固定连接有魔术贴扣,魔术贴扣内套接有方环,包体的两侧通过魔术贴扣卡接有竖挎带,包体的内壁一侧固定连接有收卷。通过设置竖挎带,结合连接第一竖带和第二竖带的扣环,在肩膀并不平齐的人使用可能滑落时,将扣环拉起,拆卸保护垫,使用者将胳膊由第一竖带和第二竖带之间插入可将竖带转换为双肩背模式,便于实现背包的双重模式使用,通过设置横绑带,在包内装有较为沉重的物品时,将竖带单侧悬挂或者侧向背后,便于将横绑带绑在使用者的腰部,防止由于包体摆动造成的脱落隐