
一种低噪声齿轮箱结构拓扑优化设计方法.pdf

是立****92


1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种低噪声齿轮箱结构拓扑优化设计方法.pdf
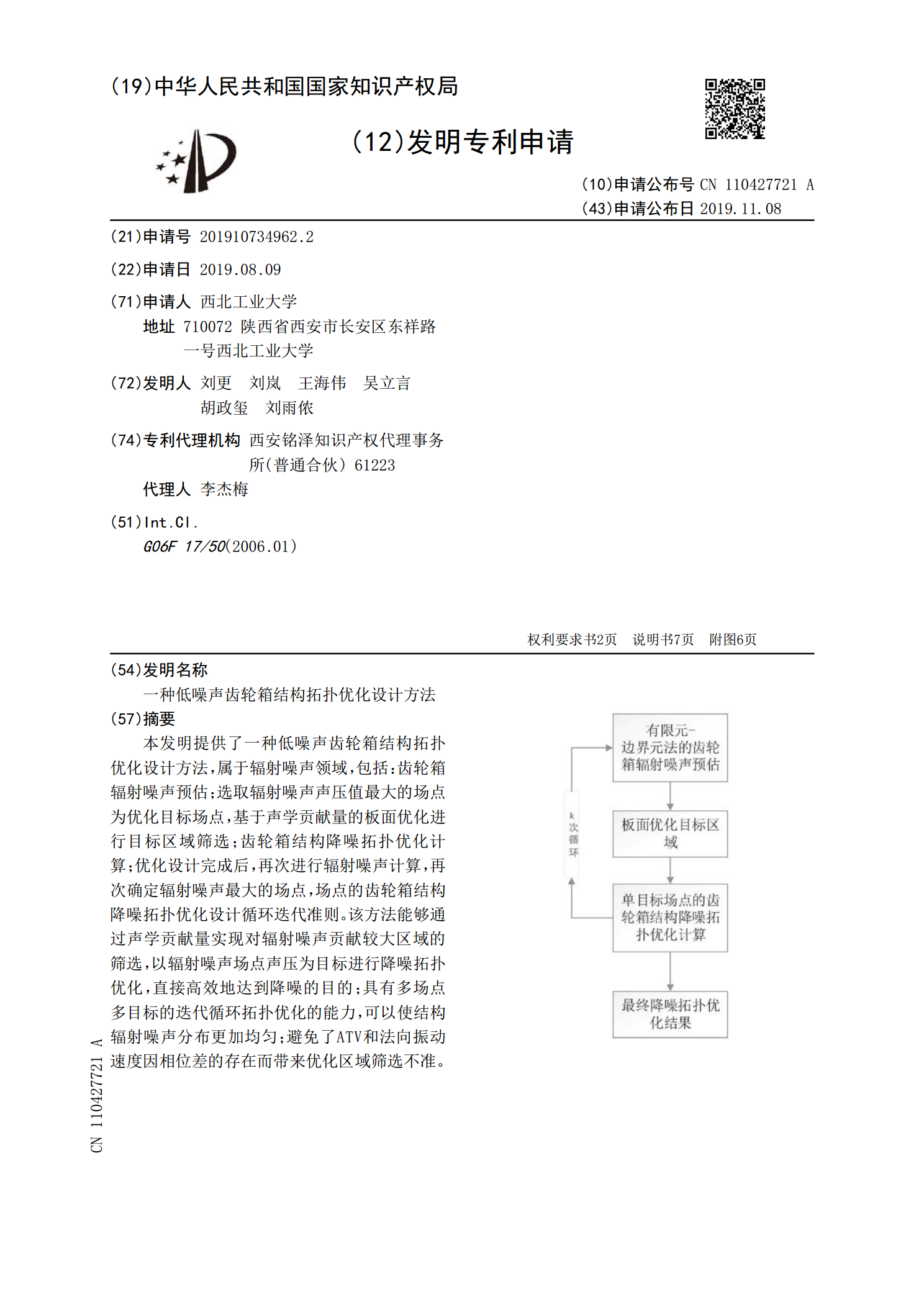
本发明提供了一种低噪声齿轮箱结构拓扑优化设计方法,属于辐射噪声领域,包括:齿轮箱辐射噪声预估;选取辐射噪声声压值最大的场点为优化目标场点,基于声学贡献量的板面优化进行目标区域筛选;齿轮箱结构降噪拓扑优化计算;优化设计完成后,再次进行辐射噪声计算,再次确定辐射噪声最大的场点,场点的齿轮箱结构降噪拓扑优化设计循环迭代准则。该方法能够通过声学贡献量实现对辐射噪声贡献较大区域的筛选,以辐射噪声场点声压为目标进行降噪拓扑优化,直接高效地达到降噪的目的;具有多场点多目标的迭代循环拓扑优化的能力,可以使结构辐射噪声分布

面向低噪声设计的结构动力学拓扑优化研究.docx
面向低噪声设计的结构动力学拓扑优化研究面向低噪声设计的结构动力学拓扑优化研究摘要:结构噪声问题是现代社会中愈发重要的考虑因素之一。随着城市化进程和交通工具的普及,人们对环境噪声的要求越来越高。因此,在结构设计中,低噪声设计是一个关键任务。本文旨在研究结构动力学拓扑优化方法,以实现低噪声设计目标。引言:在工程设计中,结构的性能评估不仅仅局限于静态和动态加载的准则。结构的噪声水平,特别是在交通工具和建筑结构中,也是一个至关重要的因素。噪声问题不仅会对人体健康产生负面影响,还会干扰人们的日常生活和工作。因此,通

一种载荷传递结构拓扑优化设计方法.pdf
本申请公开了一种载荷传递结构拓扑优化设计方法,涉及结构优化技术领域,解决了现有技术中依赖于杆单元数目的约束的技术问题。该载荷传递结构拓扑优化设计方法包括:定义设计区域和弹性区域;将目标函数设定为所述设计区域的柔顺度函数最小;将约束条件设定为:所述设计区域的材料用量小于第一预设值,以及所述弹性区域的柔顺度函数小于第二预设值:在优化过程中引入所述约束条件,迭代优化得到结果。本申请公开的载荷传递结构拓扑优化设计方法能够在结构的初始阶段保证结构刚度性能,同时考虑载荷传递均匀性,并提升了优化效率,也有利于拓扑优化约

CST齿轮箱箱体的拓扑优化设计.docx
CST齿轮箱箱体的拓扑优化设计Title:TopologyOptimizationDesignofCSTGearboxHousingAbstract:ThegearboxhousingisacriticalcomponentinthedesignofaCST(compactsizetransmission)gearbox,whichplaysacrucialroleinprotectingandsupportingthevariousinternalcomponents.Theaimofthispaper

基于拓扑优化和形状优化的低噪声齿轮室罩盖设计.docx
基于拓扑优化和形状优化的低噪声齿轮室罩盖设计Introduction齿轮室罩盖是机械系统中非常重要的零部件之一,它主要用于覆盖齿轮室区域并保护里面的机械部件不受外部环境的影响。同时,齿轮室罩盖还可以有效降低系统噪声,保证机械系统的正常运转。因此,设计一种低噪声齿轮室罩盖是很有意义的研究。TopologyOptimizationforLow-NoiseGearChamberCoverDesignTopologicaloptimizationisarigorousmethodforminimizingstru