
基于CANopen+uCOS_Ⅱ平台的主从节点通信的综述报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于CANopen+uCOS_Ⅱ平台的主从节点通信的综述报告.docx
基于CANopen+uCOS_Ⅱ平台的主从节点通信的综述报告CANopen是CAN总线的一种开放式应用层通信协议,常被用于工业自动化领域中的通信系统。而uCOS_Ⅱ是一种实时操作系统,被广泛应用于嵌入式系统中。本文将从介绍CANopen协议和uCOS_Ⅱ操作系统入手,探讨基于这两者的主从节点通信的实现方法。一、CANopen协议CANopen是一种基于CAN总线的高级通信协议。它将CAN总线分为两个层次:物理层和数据链路层。物理层是实现底层总线硬件的部分,而数据链路层则是CANopen协议的核心。CANo

基于CANopen+uCOS_Ⅱ平台的主从节点通信的任务书.docx
基于CANopen+uCOS_Ⅱ平台的主从节点通信的任务书任务名称:基于CANopen+uCOS_Ⅱ平台的主从节点通信任务背景:在工业自动化领域,常需要使用到CAN总线进行通信。CAN总线可以实现多个节点之间的数据传输,保证了实时性和可靠性。而CANopen协议则是在CAN总线上应用最广泛的一种通信协议,其可以通过预定义的对象字典来进行数据交换,同时也提供了多种操作模式。uCOS_Ⅱ则是一款小型的嵌入式实时操作系统,可以满足实时性、可靠性、可扩展性、可维护性等要求。将CANopen协议和uCOS_Ⅱ系统相

水声通信网络节点信号处理平台的设计与实现的综述报告.docx
水声通信网络节点信号处理平台的设计与实现的综述报告水声通信网络节点信号处理平台的设计与实现随着海洋资源的开发和海上交通的增加,水下通信网络的发展已成为海洋科学与技术研究领域的一个热点。水声通信是水下通信网络中的一种重要通信方式,但水下环境的复杂性,如水下噪声和声学多径等因素,对水声通信的可靠性和性能提出了更高的要求。为了解决这些问题,研究人员逐渐开发出了一系列水声通信节点信号处理平台。设计一个水声通信节点信号处理平台需要涉及多个方面。首先,需要确定平台的硬件和软件部分。硬件部分需要选择合适的传感器、数据采

基于虚拟仪器平台的水声通信节点研究的中期报告.docx
基于虚拟仪器平台的水声通信节点研究的中期报告一、研究背景与意义水声通信具有特定的传输特性和应用场景,被广泛应用于水下测量、水下定位、水下探测等领域。传统的水声通信系统存在系统复杂度高、成本昂贵、维护麻烦等问题,且无法进行实时数据采集和分析统计。为解决这些问题,基于虚拟仪器平台的水声通信节点研究应运而生。二、研究目标本研究旨在设计一种基于虚拟仪器平台的水声通信节点,实现数据采集、信号处理、通信控制等功能,并通过实验评估其性能和可靠性。三、研究内容1.建立水声通信节点的模型利用仿真工具建立水声通信节点的模型,
一种基于主从节点模式的物联网物流通信系统.pdf
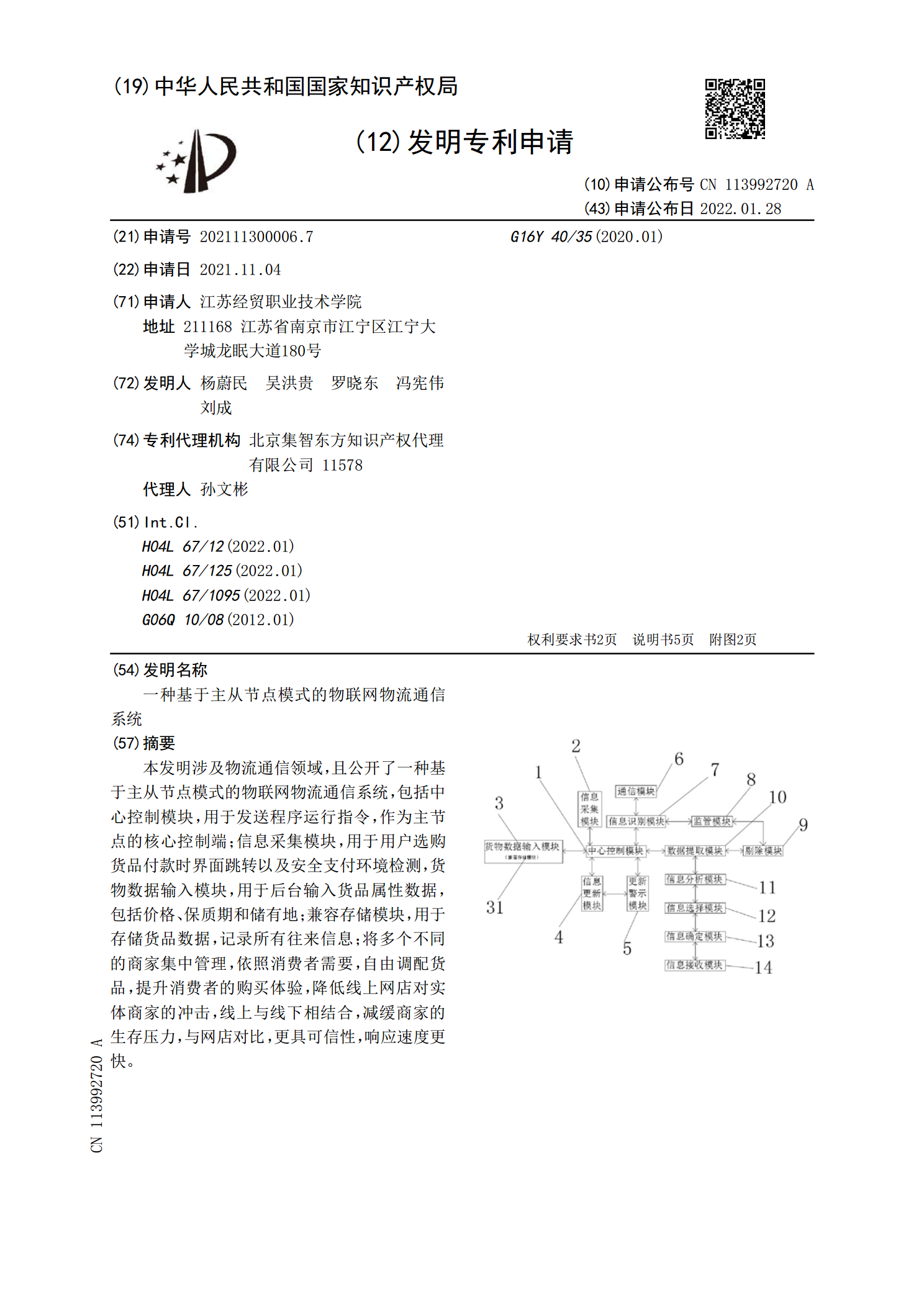
本发明涉及物流通信领域,且公开了一种基于主从节点模式的物联网物流通信系统,包括中心控制模块,用于发送程序运行指令,作为主节点的核心控制端;信息采集模块,用于用户选购货品付款时界面跳转以及安全支付环境检测,货物数据输入模块,用于后台输入货品属性数据,包括价格、保质期和储有地;兼容存储模块,用于存储货品数据,记录所有往来信息;将多个不同的商家集中管理,依照消费者需要,自由调配货品,提升消费者的购买体验,降低线上网店对实体商家的冲击,线上与线下相结合,减缓商家的生存压力,与网店对比,更具可信性,响应速度更快。