
重载锻造操作机夹钳旋转双齿轮并联传动系统负载均衡分析与控制的综述报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

重载锻造操作机夹钳旋转双齿轮并联传动系统负载均衡分析与控制的综述报告.docx
重载锻造操作机夹钳旋转双齿轮并联传动系统负载均衡分析与控制的综述报告本文将对重载锻造操作机夹钳旋转双齿轮并联传动系统负载均衡分析与控制进行综述,主要包括以下内容:传统夹钳机负载不均衡的问题及引起的危害,夹钳旋转双齿轮并联传动系统的结构及工作原理,负载均衡控制方法的分类及应用情况,总结与展望。一、传统夹钳机负载不均衡的问题及引起的危害重载锻造操作机夹钳在工作时会受到较大的负载,如果负载分布不均衡,不仅会影响操作机的生产效率和品质,还会造成以下危害:①导致机床变形和加工质量下降;②加快工具的磨损和疲劳破坏;③

重载锻造操作机夹钳旋转双齿轮并联传动系统负载均衡分析与控制.pptx
汇报人:/目录0102系统简介系统工作原理系统应用场景03负载均衡概念负载均衡策略系统负载均衡的实现负载均衡效果评估04控制方法概述控制策略设计控制算法实现控制效果验证05实验设备与实验条件实验过程与数据分析结果分析与讨论实验结论与改进方向06研究成果总结未来研究方向展望汇报人:

双齿轮并联传动的负载均衡性仿真研究.docx
双齿轮并联传动的负载均衡性仿真研究双齿轮并联传动的负载均衡性仿真研究摘要:双齿轮并联传动是一种常见的机械传动方式,具有较高的传动效率和负载能力。然而,在实际应用中,由于制造误差、装配误差或磨损等因素,双齿轮并联传动中会出现负载不均衡的情况,导致传动性能下降。本文通过建立双齿轮并联传动的负载均衡性仿真模型,研究了不同因素对于传动系统负载均衡性的影响,并提出了相应的改进措施,以提高双齿轮并联传动的负载均衡能力。关键词:双齿轮并联传动,负载均衡性,仿真研究一、引言双齿轮并联传动是一种常见的机械传动方式,由于具有
双电机齿轮传动系统转矩均衡控制方法.pdf
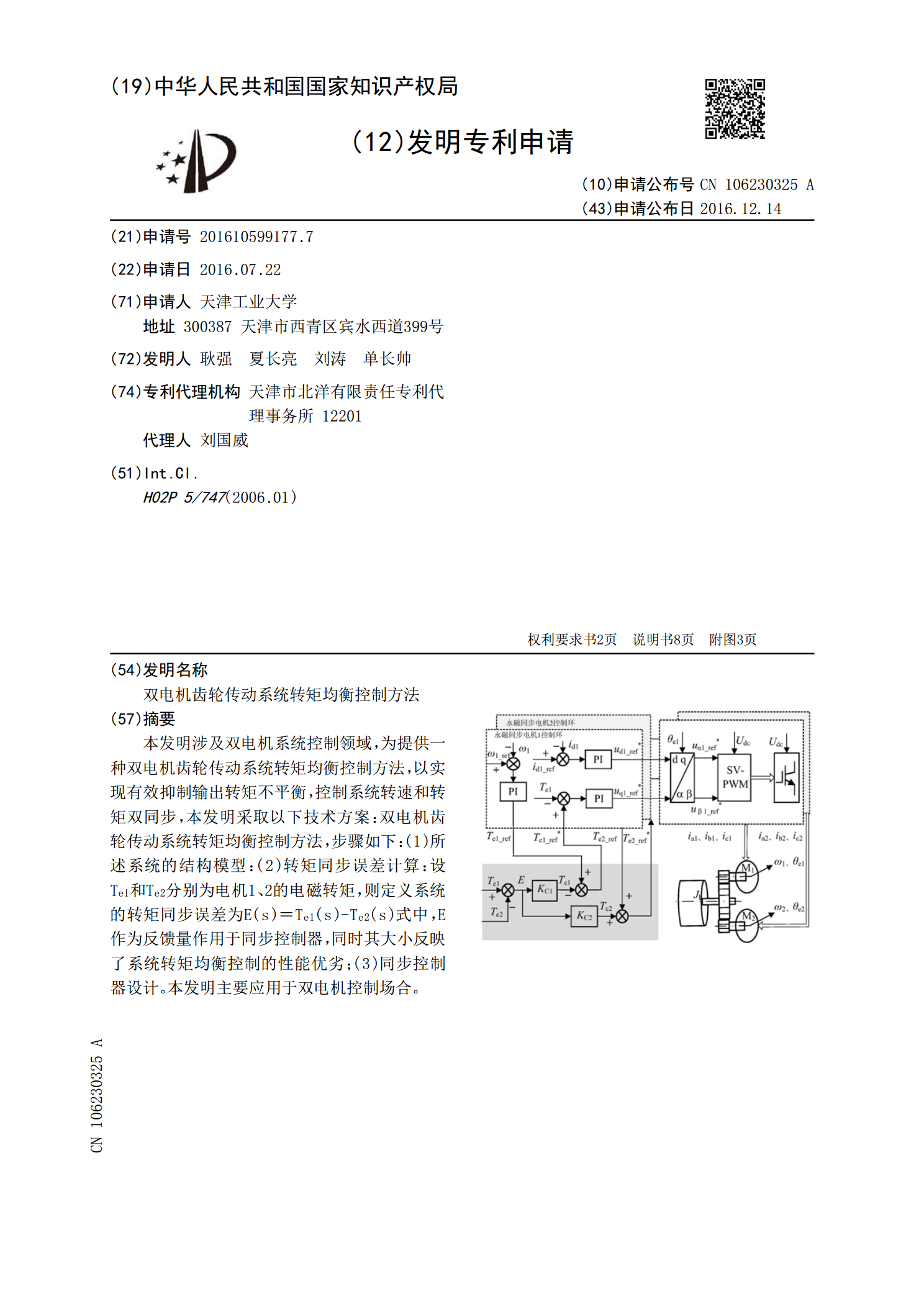
本发明涉及双电机系统控制领域,为提供一种双电机齿轮传动系统转矩均衡控制方法,以实现有效抑制输出转矩不平衡,控制系统转速和转矩双同步,本发明采取以下技术方案:双电机齿轮传动系统转矩均衡控制方法,步骤如下:(1)所述系统的结构模型:(2)转矩同步误差计算:设T

重载锻造操作机大车行走精度控制的研究的开题报告.docx
重载锻造操作机大车行走精度控制的研究的开题报告一、选题背景锻造操作机是一种经典的大型工业机械设备,广泛应用于冶金、航空、汽车制造等领域。锻造操作机大车是锻造操作机的主要部件之一,负责承载和移动锻造模具、锻造件等重物。由于在锻造工艺中,锻造模具和锻造件具有较高的精度要求,因此锻造操作机大车的行走精度对锻造产品的质量影响很大。目前,锻造操作机大车行走精度控制技术已经成为研究的热点之一。本论文旨在对重载锻造操作机大车行走精度控制技术进行深入研究,为提高锻造工艺的质量和效率提供技术支撑。二、研究内容1.重载锻造操