
基站天线电下倾角调节传动机构及基站天线.pdf

雨巷****莺莺


1/10

2/10
3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基站天线电下倾角调节传动机构及基站天线.pdf
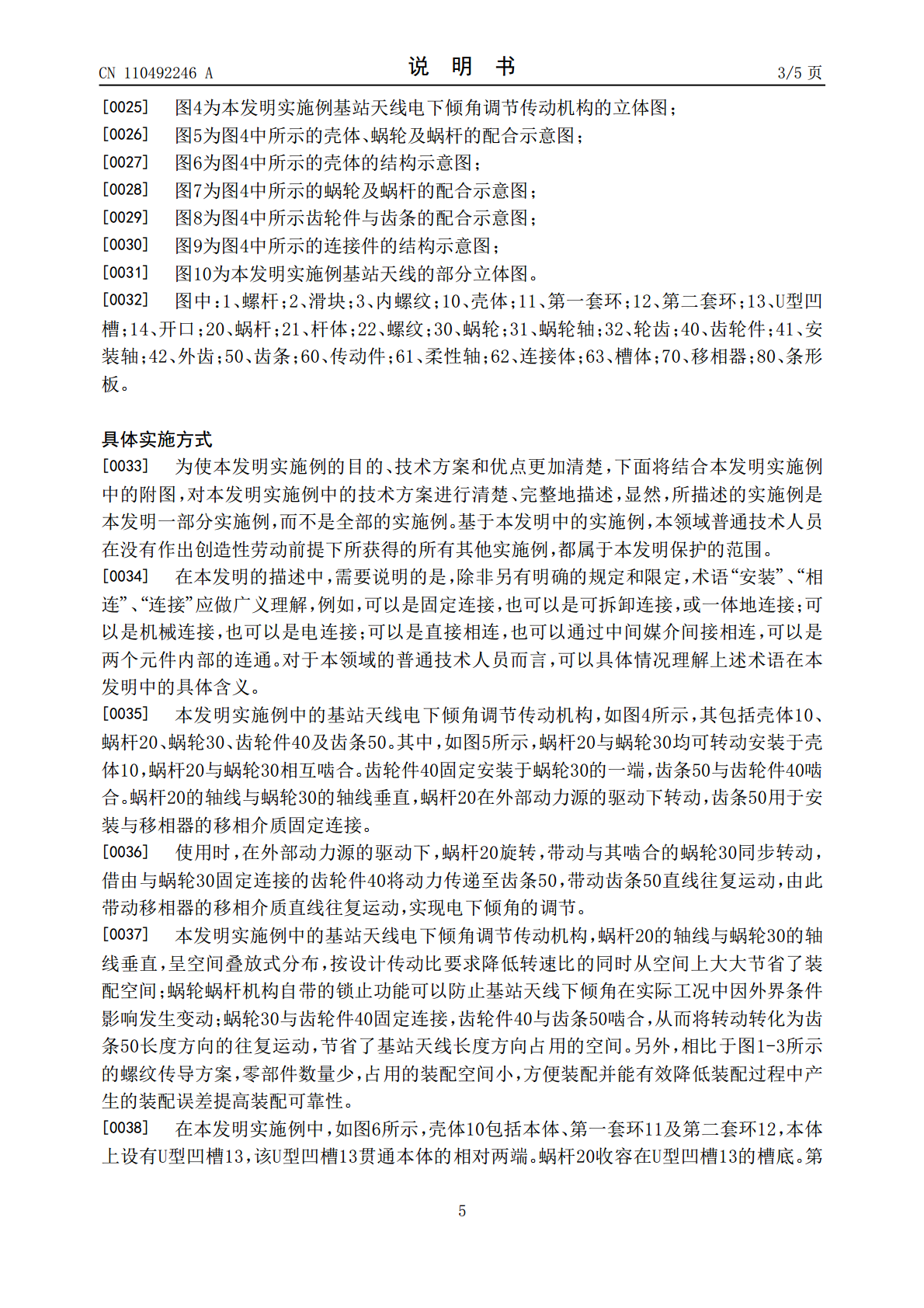
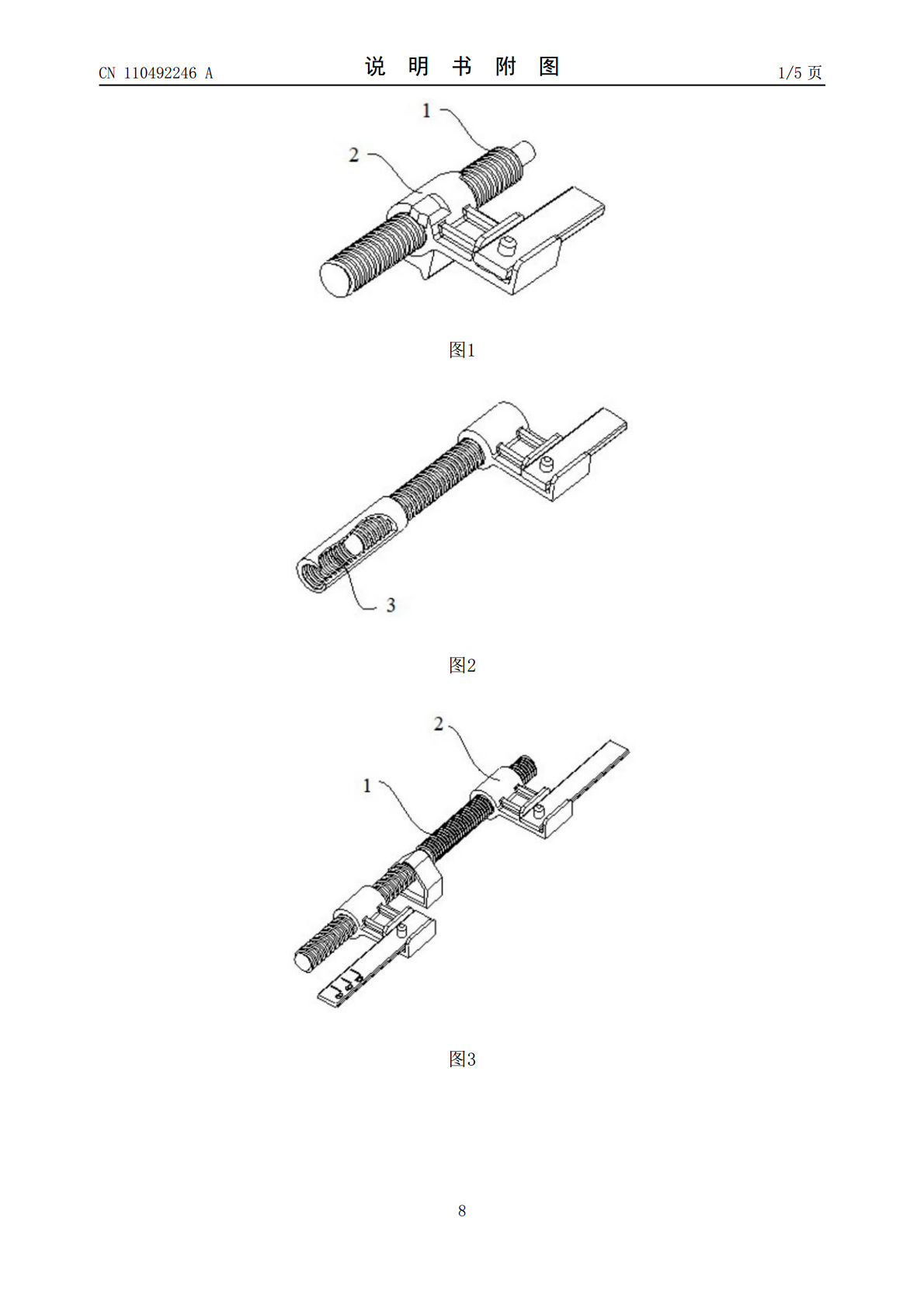
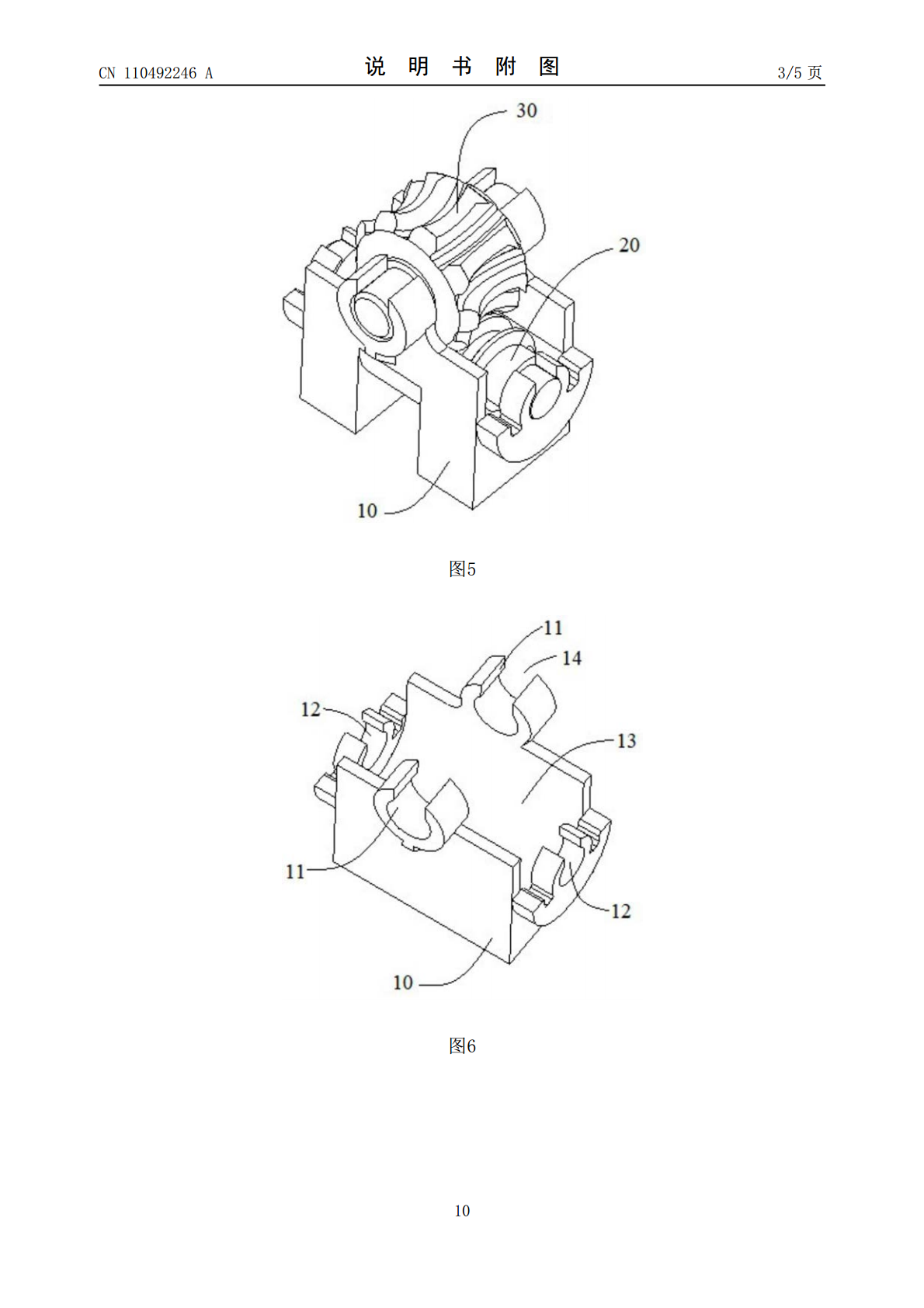
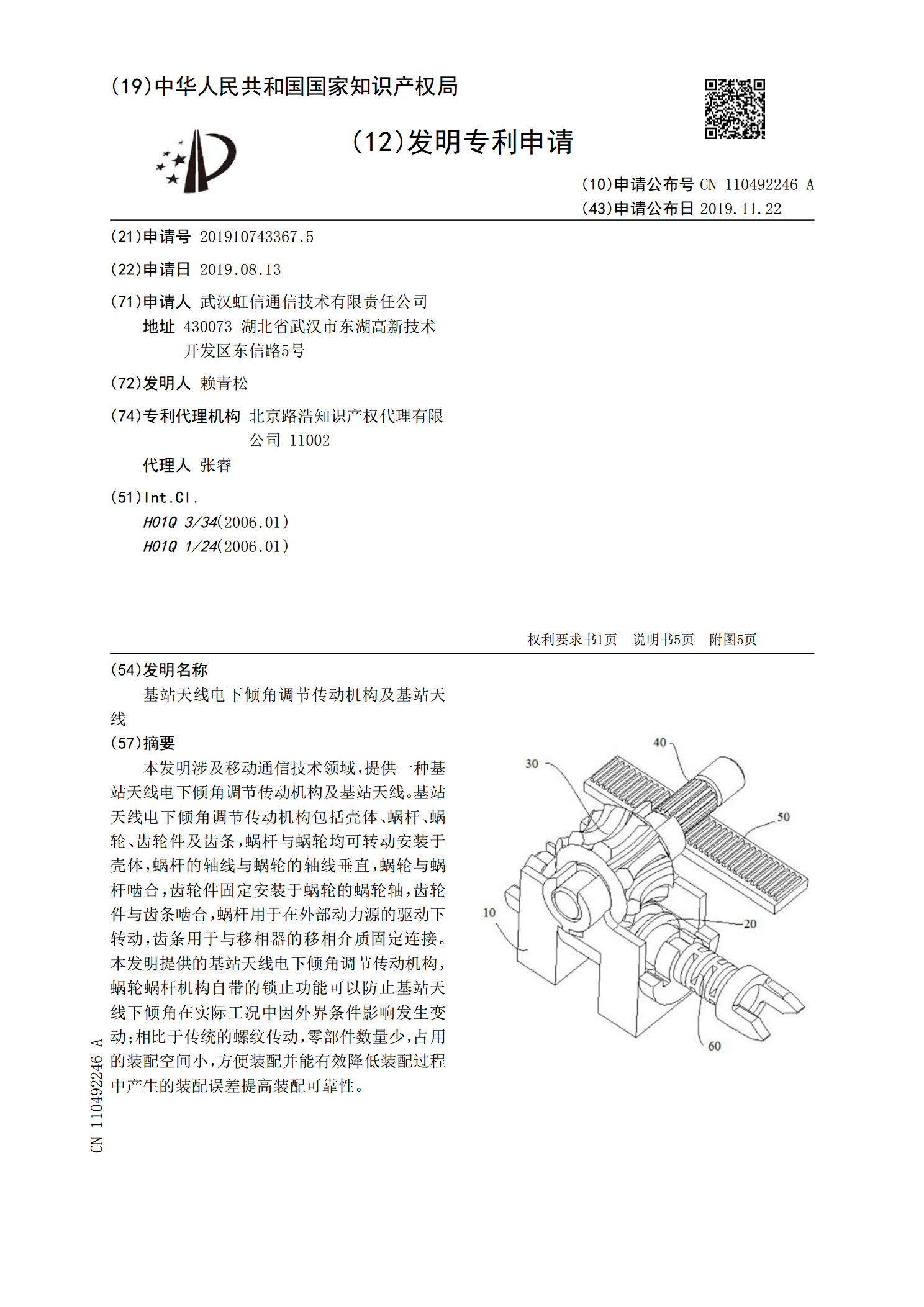
本发明涉及移动通信技术领域,提供一种基站天线电下倾角调节传动机构及基站天线。基站天线电下倾角调节传动机构包括壳体、蜗杆、蜗轮、齿轮件及齿条,蜗杆与蜗轮均可转动安装于壳体,蜗杆的轴线与蜗轮的轴线垂直,蜗轮与蜗杆啮合,齿轮件固定安装于蜗轮的蜗轮轴,齿轮件与齿条啮合,蜗杆用于在外部动力源的驱动下转动,齿条用于与移相器的移相介质固定连接。本发明提供的基站天线电下倾角调节传动机构,蜗轮蜗杆机构自带的锁止功能可以防止基站天线下倾角在实际工况中因外界条件影响发生变动;相比于传统的螺纹传动,零部件数量少,占用的装配空间小
基站天线、电下倾角的传动装置及切换机构.pdf
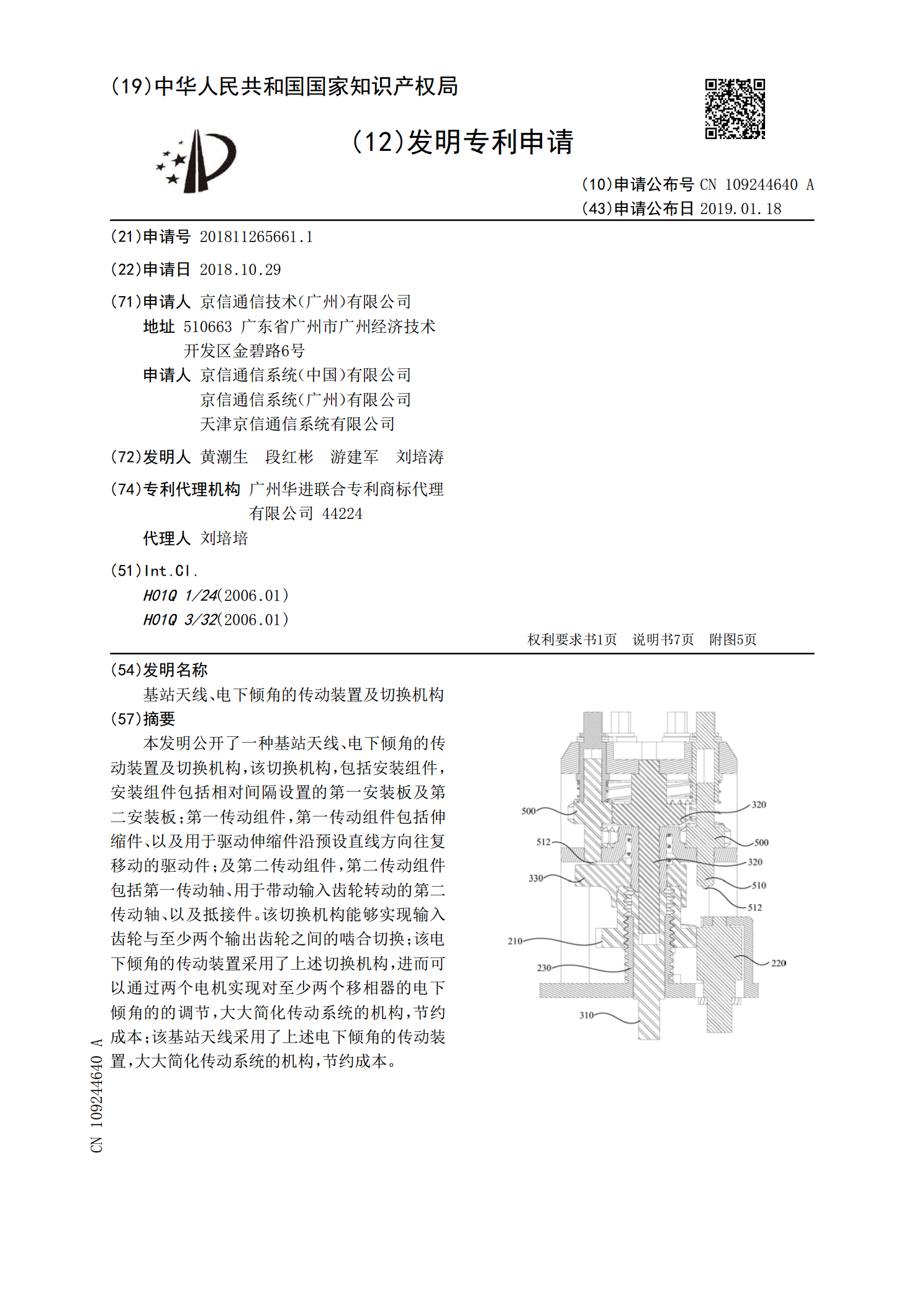
本发明公开了一种基站天线、电下倾角的传动装置及切换机构,该切换机构,包括安装组件,安装组件包括相对间隔设置的第一安装板及第二安装板;第一传动组件,第一传动组件包括伸缩件、以及用于驱动伸缩件沿预设直线方向往复移动的驱动件;及第二传动组件,第二传动组件包括第一传动轴、用于带动输入齿轮转动的第二传动轴、以及抵接件。该切换机构能够实现输入齿轮与至少两个输出齿轮之间的啮合切换;该电下倾角的传动装置采用了上述切换机构,进而可以通过两个电机实现对至少两个移相器的电下倾角的的调节,大大简化传动系统的机构,节约成本;该基站
用于基站天线的传动机构和基站天线.pdf
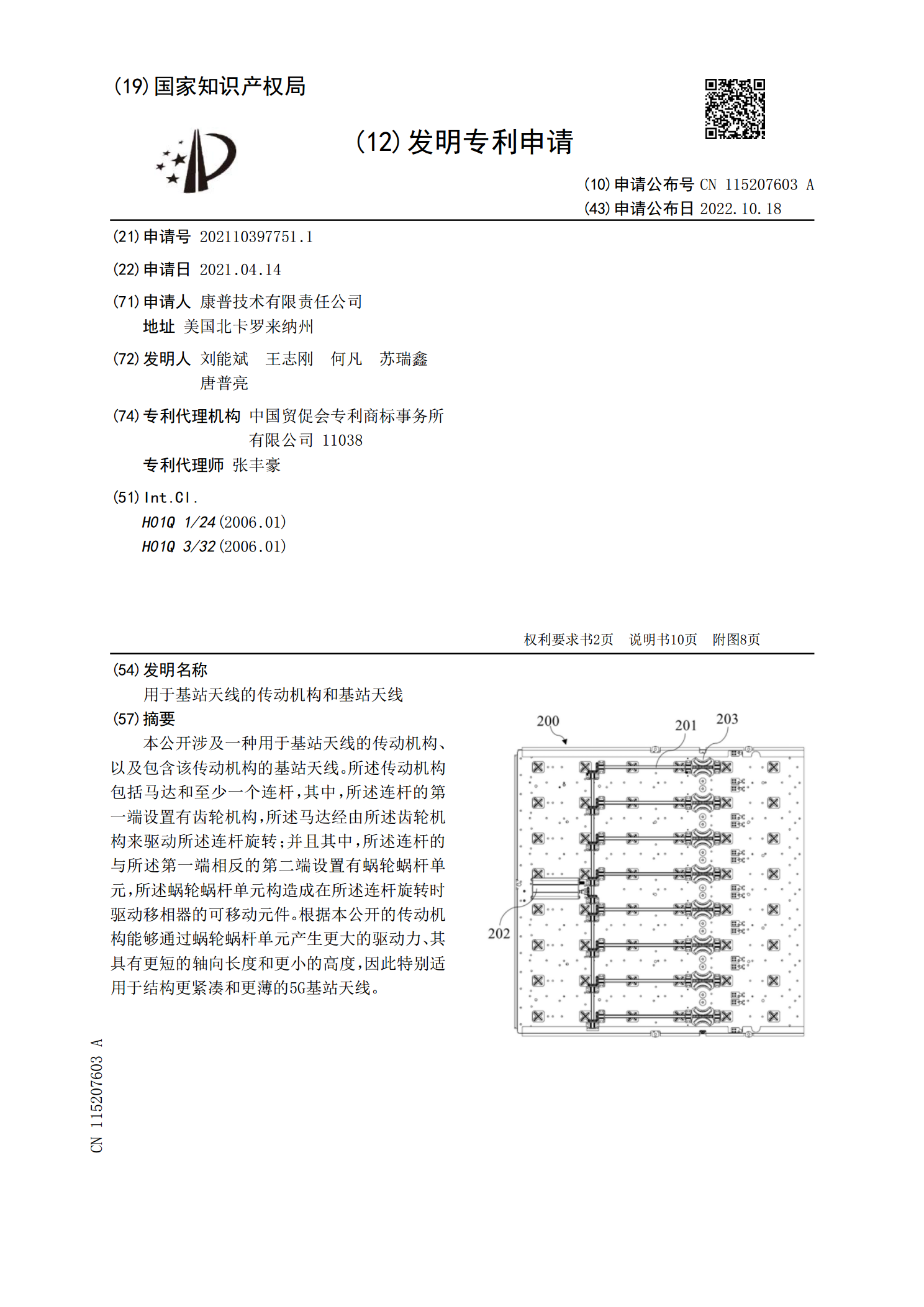
本公开涉及一种用于基站天线的传动机构、以及包含该传动机构的基站天线。所述传动机构包括马达和至少一个连杆,其中,所述连杆的第一端设置有齿轮机构,所述马达经由所述齿轮机构来驱动所述连杆旋转;并且其中,所述连杆的与所述第一端相反的第二端设置有蜗轮蜗杆单元,所述蜗轮蜗杆单元构造成在所述连杆旋转时驱动移相器的可移动元件。根据本公开的传动机构能够通过蜗轮蜗杆单元产生更大的驱动力、其具有更短的轴向长度和更小的高度,因此特别适用于结构更紧凑和更薄的5G基站天线。

电调天线传动切换装置及基站天线.pdf
本发明涉及移动通信基站天线领域,公开了一种电调天线传动切换装置及基站天线,包括:传动机构包括螺杆、传动轴、传动齿轮和第一驱动件;若干个螺杆并排设置,螺杆与下倾角调节装置一一对应连接;螺杆的第一端与传动轴的第一端选择性接合连接;任一传动轴上套设传动齿轮,传动齿轮和传动轴一体转动且传动轴相对传动齿轮沿轴向可滑动;第一驱动件用于同时驱动若干个传动齿轮转动;切换机构设于传动轴的第二端,用于择一推动传动轴沿轴向移动与对应的螺杆连接。本发明提供的一种电调天线传动切换装置及基站天线平铺设置,避免占用天线有限的高度空间,

用于基站天线的倾角计.pdf
本公开涉及一种用于基站天线的倾角计,所述倾角计构造成用于安装至基站天线,所述倾角计包括:可运动的重物,所述重物构造成用于,在所述重物的重力的作用下运动至和停留在与基站天线的机械倾角相关的力平衡位置上;与所述重物运动耦合的指示器;和多个刻度,所述多个刻度与指示器共同作用,用于读取基站天线的机械倾角。借助于该倾角计,可以容易地直观地获取基站天线的机械倾角。