
阻尼力控制装置.pdf

东耀****哥哥

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
阻尼力控制装置.pdf
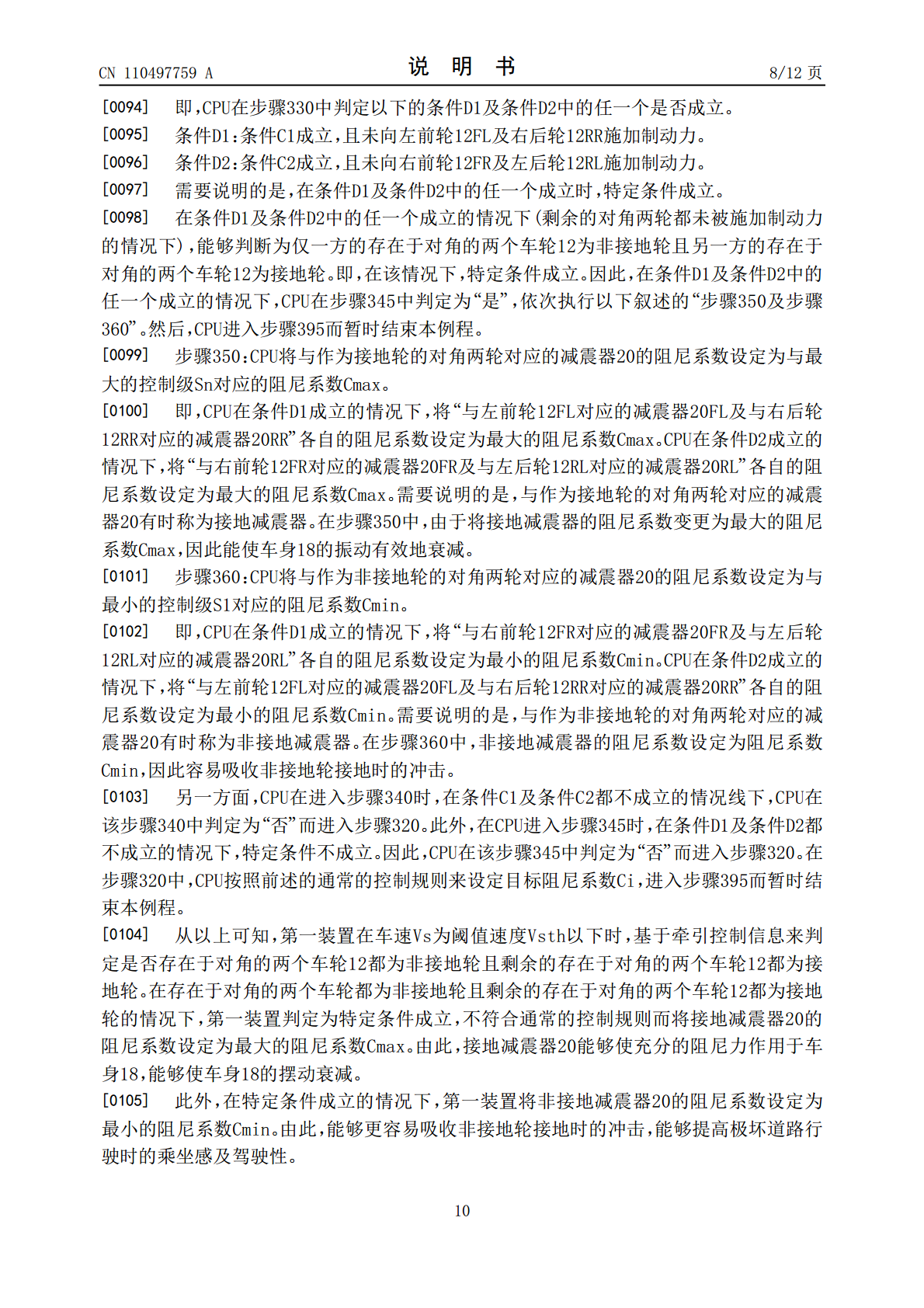
阻尼力控制装置(10)具备:相对于多个车轮中的每一个,设置在车辆的簧上部分与所述车辆的簧下部分之间,能够变更阻尼系数的阻尼力可变式减震器(20FL~20RR);检测各车轮的位置处的簧上的上下振动状态量的检测部(30FL~30RR);执行在所述多个车轮全部为接地的接地轮的前提下按照规定的控制规则且基于所述上下振动状态量来变更所述减震器各自的阻尼系数的通常时控制的减震控制部。减震控制部在判定为包含多个车轮中的一部分为接地轮且多个车轮中的剩余的车轮为非接地轮的条件的特定条件成立的情况下,取代通常时控制而执行将与
悬架的阻尼力控制装置.pdf
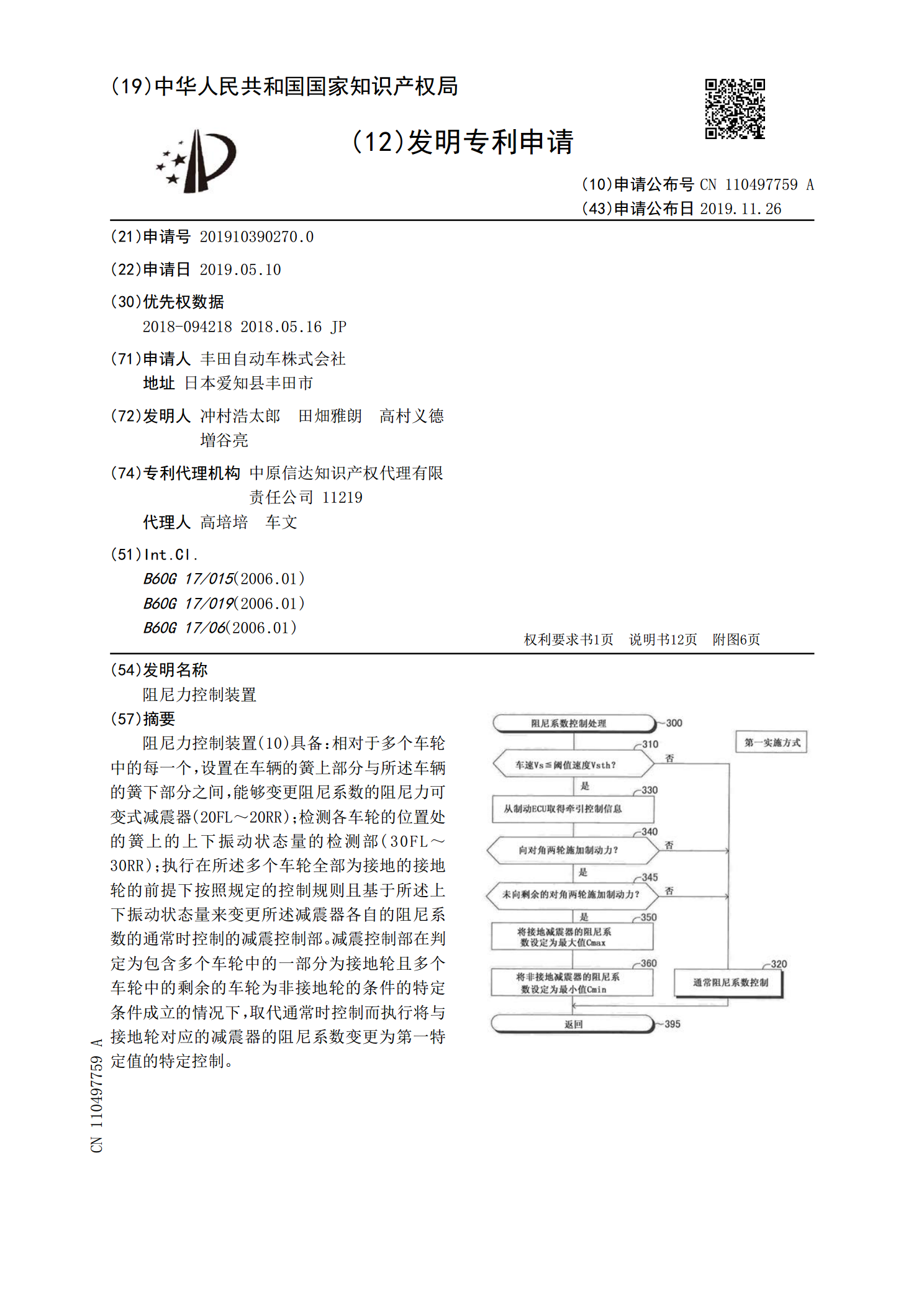
本发明提供一种能够在阻尼系数的较宽范围内,提高阻尼器的推算相对速度的精度的悬架的阻尼力控制装置。阻尼力控制装置控制阻尼器的阻尼力控制值,并具有:相对速度推算装置,推算车轮相对于车体的相对速度;阻尼力计算装置,基于车体的控制输入变量和推算相对速度决定阻尼力控制值。相对速度推算装置基于推算相对速度以及阻尼力控制值推算阻尼力,利用延迟校正部校正推算阻尼力来得到延迟校正后推算阻尼力,基于延迟校正后推算阻尼力和相对速度推算装置的输入变量来计算推算相对速度。延迟校正部基于阻尼力控制值来校正推算阻尼力,以实测的相对速度
用于设定缓冲器的阻尼力的方法和控制装置.pdf
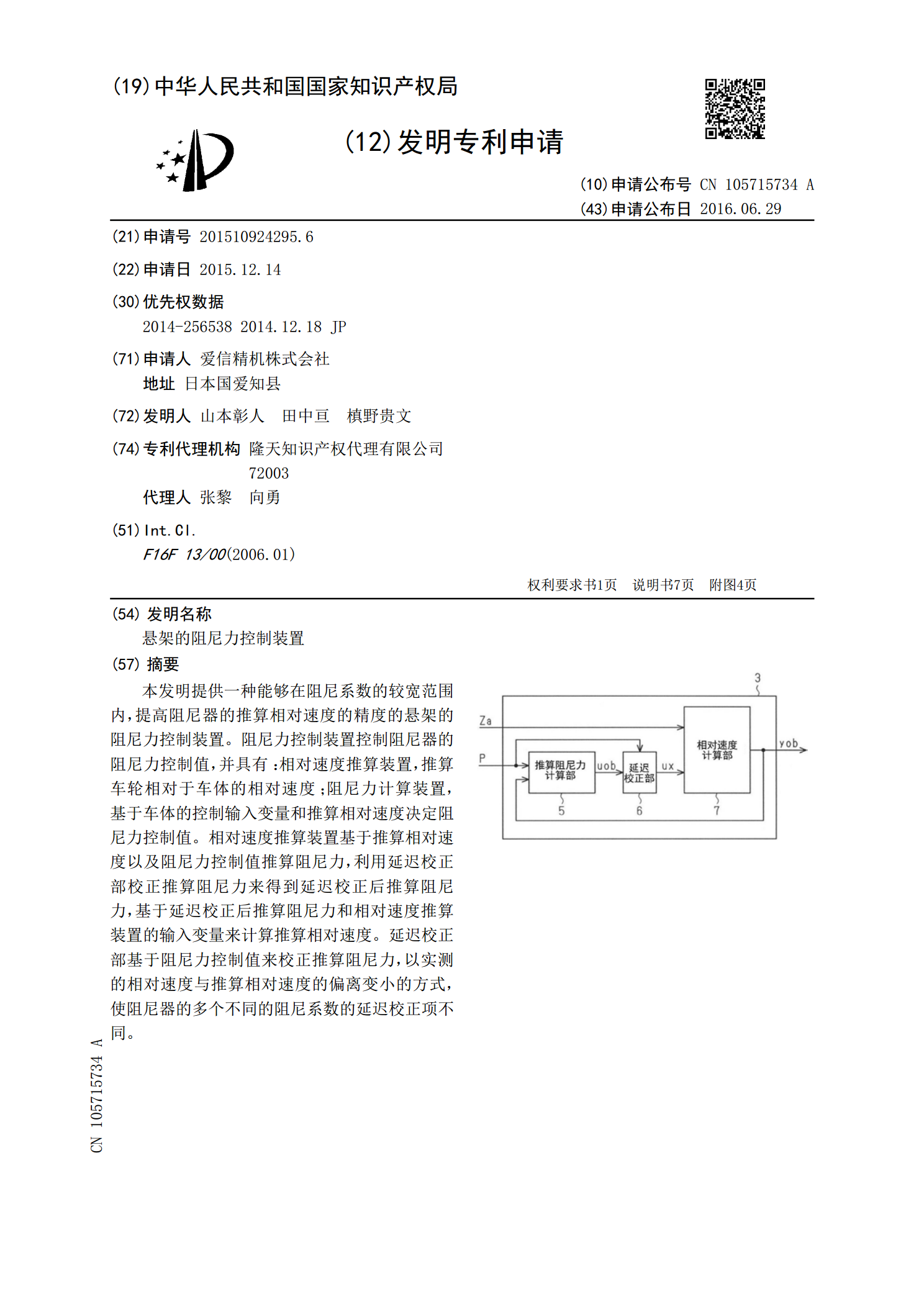
用于设定机动车辆的在车体与车轮之间连接到车辆拐角处的缓冲器的阻尼力(F

永磁阻尼装置的磁场分析及阻尼力矩研究.pptx
永磁阻尼装置的磁场分析及阻尼力矩研究目录永磁阻尼装置的磁场分析磁场分布特点磁场强度计算磁场稳定性分析磁场对阻尼性能的影响永磁阻尼装置的阻尼力矩研究阻尼力矩的来源阻尼力矩的计算阻尼力矩的影响因素阻尼力矩的优化设计永磁阻尼装置的应用前景在机械系统中的应用在减震降噪中的应用在能源回收中的应用在其他领域的应用永磁阻尼装置的研究展望磁场分析方法的改进阻尼力矩研究的深入新型永磁材料的研发实际应用的验证与优化感谢观看
电子控制悬架设备及其阻尼力控制方法.pdf
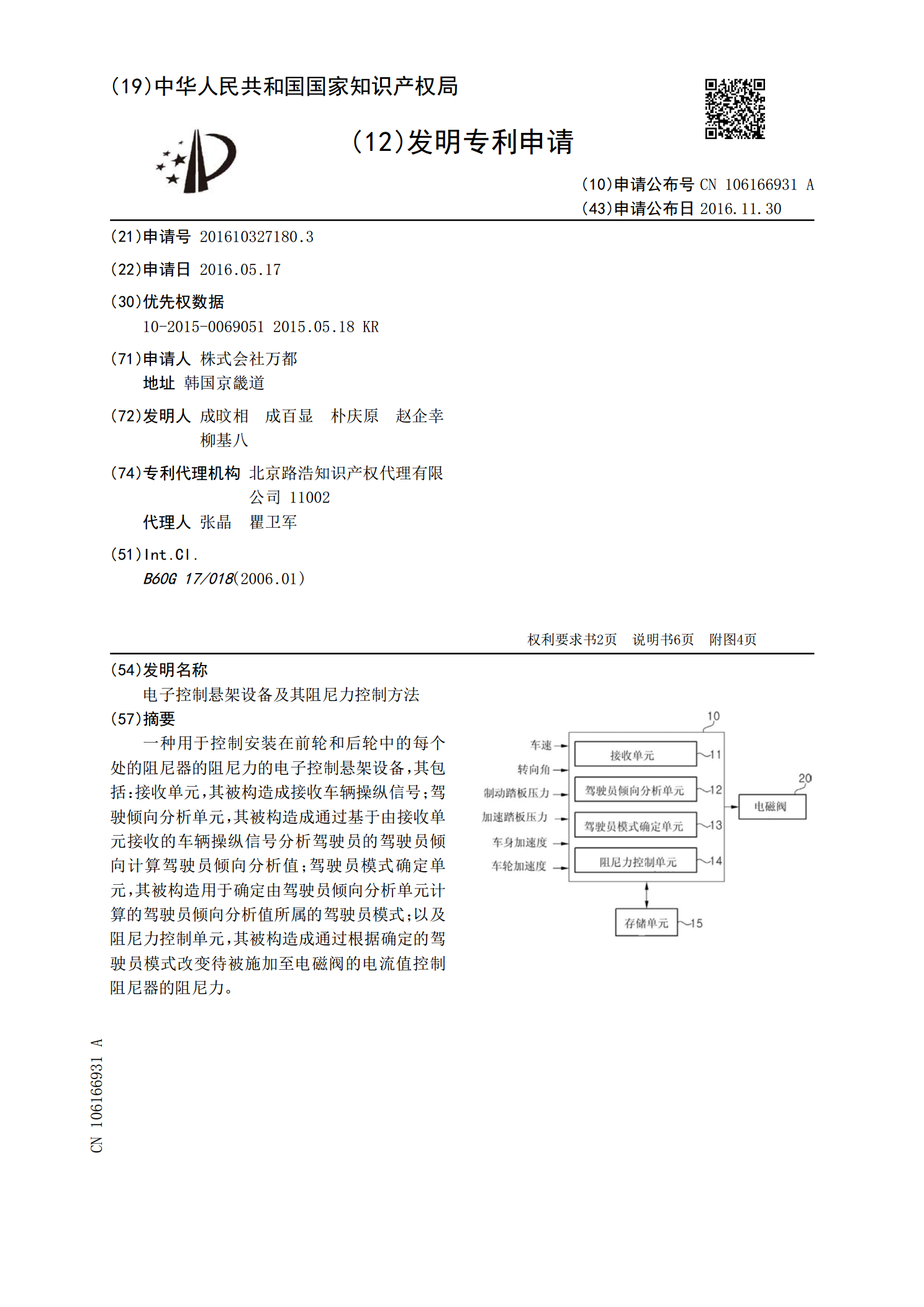
一种用于控制安装在前轮和后轮中的每个处的阻尼器的阻尼力的电子控制悬架设备,其包括:接收单元,其被构造成接收车辆操纵信号;驾驶倾向分析单元,其被构造成通过基于由接收单元接收的车辆操纵信号分析驾驶员的驾驶员倾向计算驾驶员倾向分析值;驾驶员模式确定单元,其被构造用于确定由驾驶员倾向分析单元计算的驾驶员倾向分析值所属的驾驶员模式;以及阻尼力控制单元,其被构造成通过根据确定的驾驶员模式改变待被施加至电磁阀的电流值控制阻尼器的阻尼力。