
一种激光光斑中心位置及轮廓获取方法.pdf

是飞****文章


1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种激光光斑中心位置及轮廓获取方法.pdf
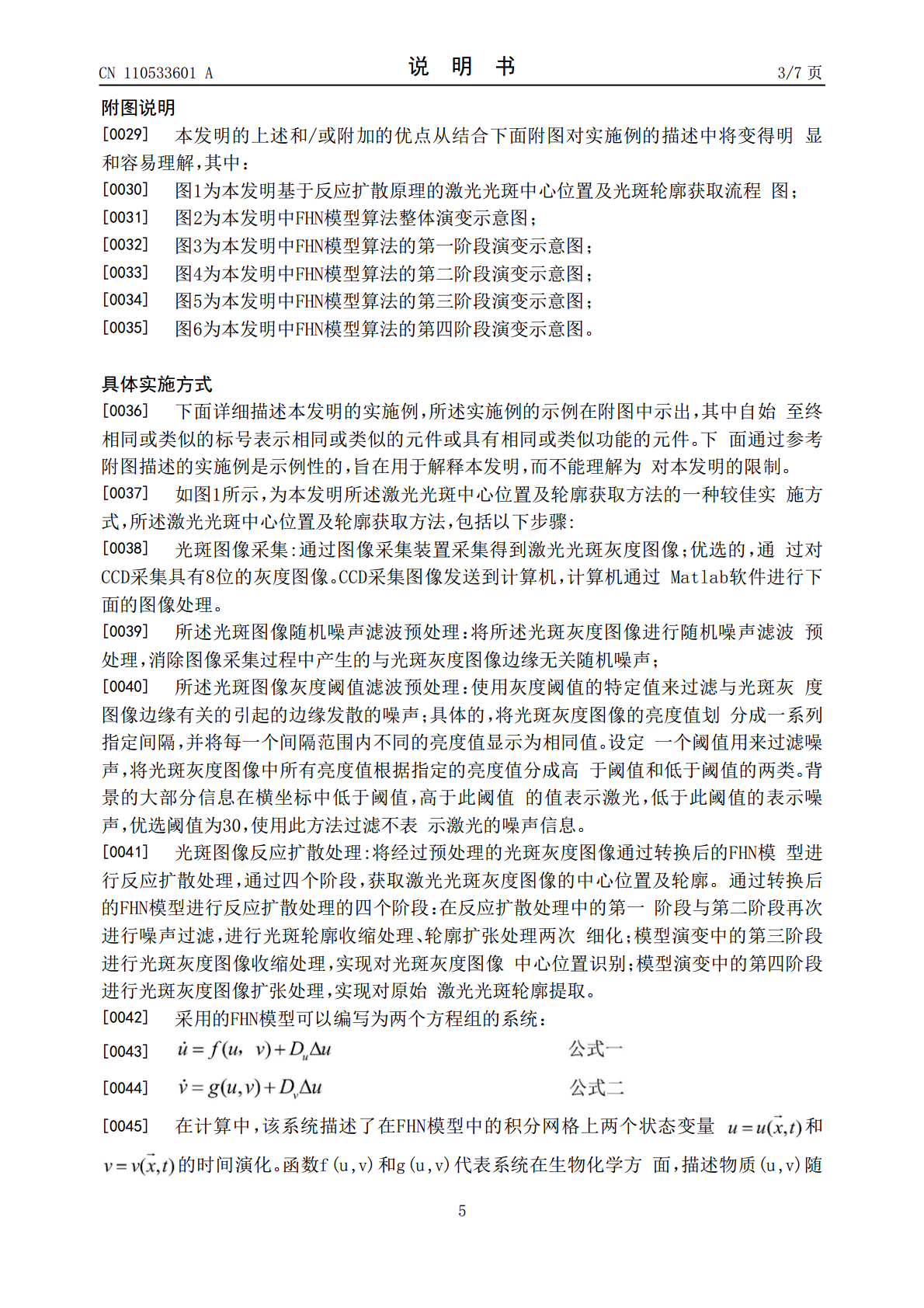
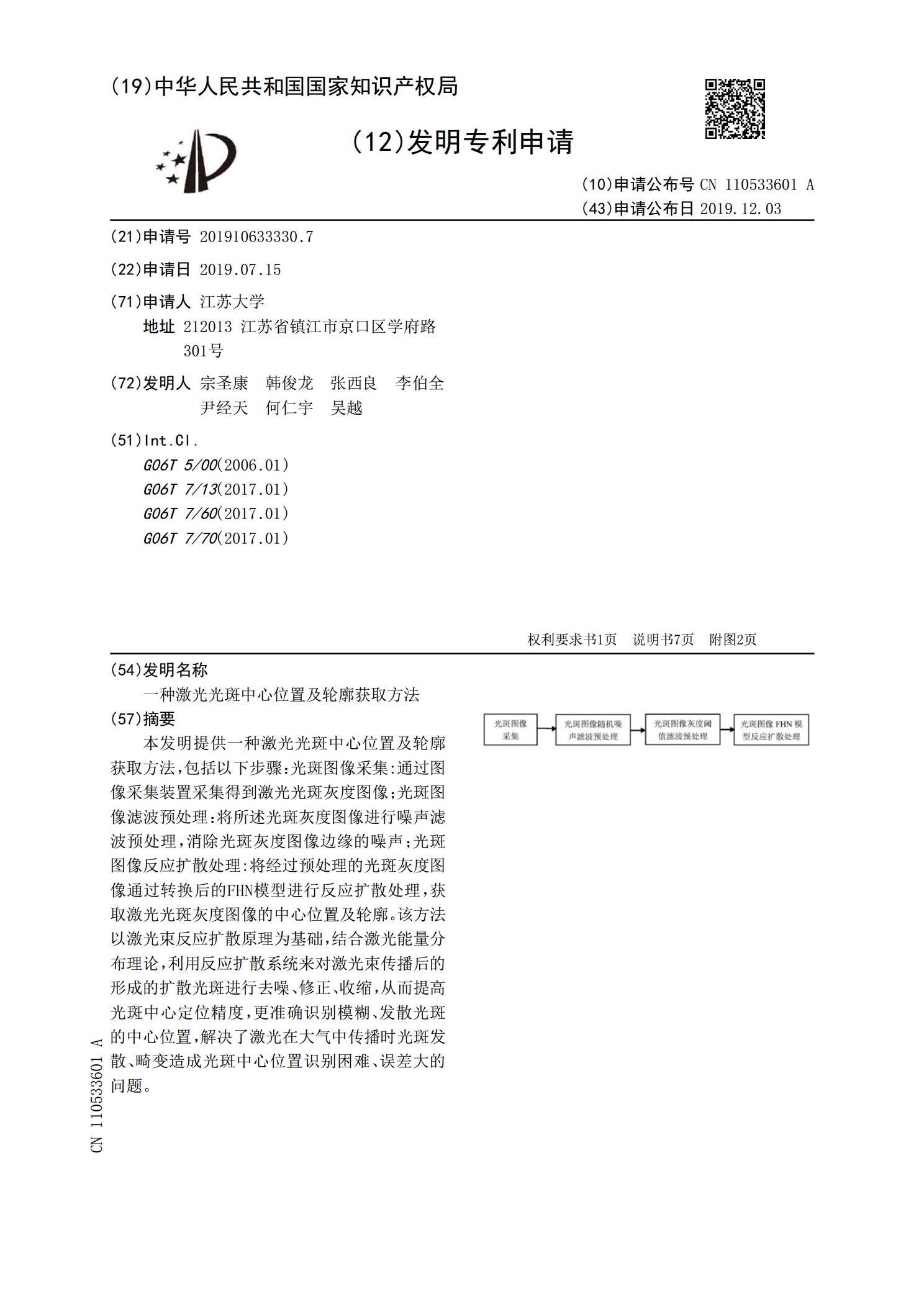
本发明提供一种激光光斑中心位置及轮廓获取方法,包括以下步骤:光斑图像采集:通过图像采集装置采集得到激光光斑灰度图像;光斑图像滤波预处理:将所述光斑灰度图像进行噪声滤波预处理,消除光斑灰度图像边缘的噪声;光斑图像反应扩散处理:将经过预处理的光斑灰度图像通过转换后的FHN模型进行反应扩散处理,获取激光光斑灰度图像的中心位置及轮廓。该方法以激光束反应扩散原理为基础,结合激光能量分布理论,利用反应扩散系统来对激光束传播后的形成的扩散光斑进行去噪、修正、收缩,从而提高光斑中心定位精度,更准确识别模糊、发散光斑的中心

光斑中心位置方法的研究.docx
光斑中心位置方法的研究随着科学技术的不断发展,光学成像技术在医学、航空航天等诸多领域中得到了广泛应用。其中,光斑中心位置的测量技术是光学成像技术中一个重要的方面。本文旨在探讨光斑中心位置的测量方法。一、背景光学成像技术在生物医学和航天等领域的广泛应用,促使光学传感器设计者致力于提高传感器分辨率和精度,以便能准确地测量斑点中心。光斑中心的确定一般需要依据图片准确判断,然而实际情况中受到环境因素的影响,不同的测量方法表现出的精度和稳定性也会不同。二、测量方法1.基于图像处理的方法在图像处理方面,较为常用的方法
一种激光光斑尺寸边缘轮廓线绘制方法.pdf
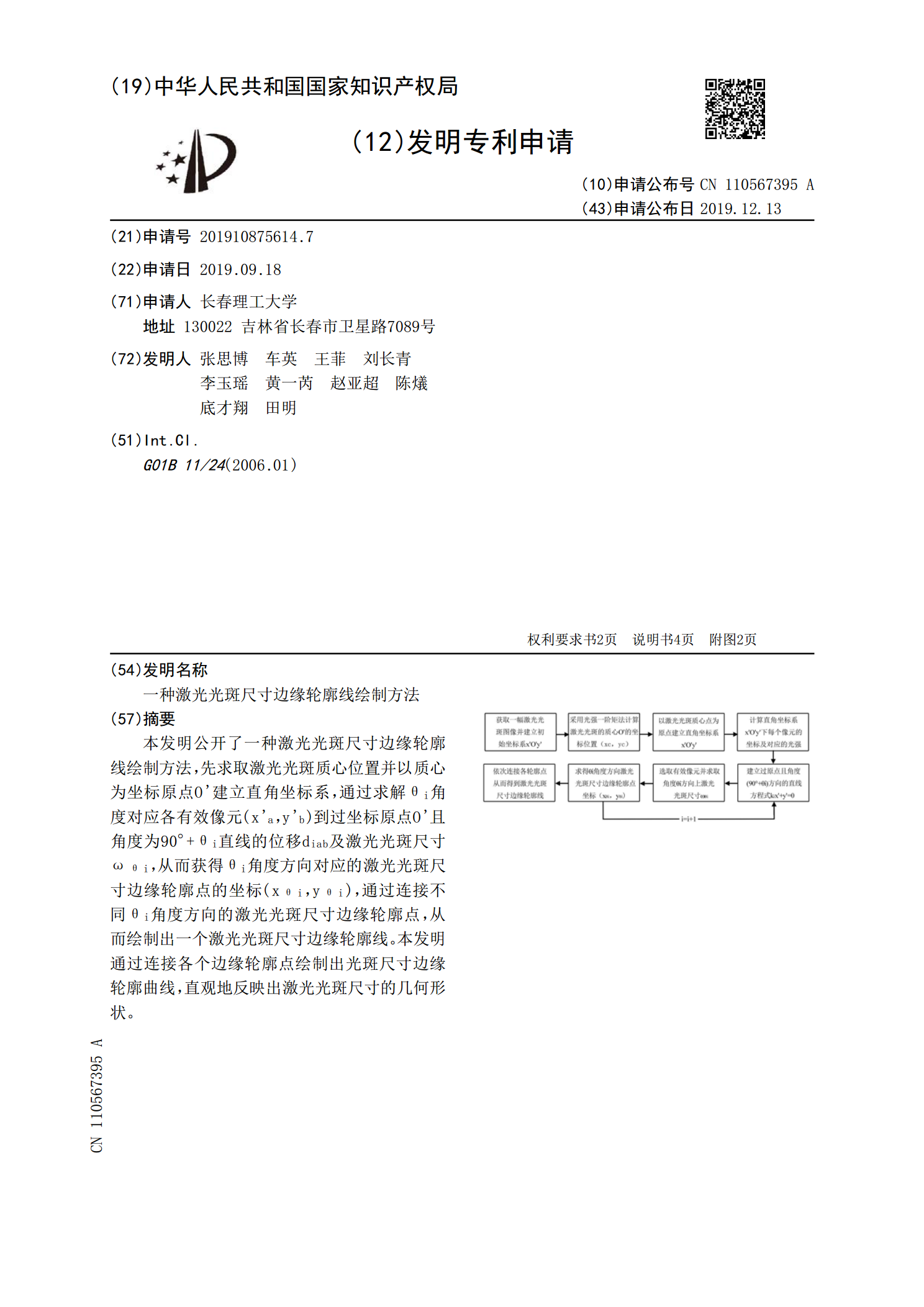
本发明公开了一种激光光斑尺寸边缘轮廓线绘制方法,先求取激光光斑质心位置并以质心为坐标原点O'建立直角坐标系,通过求解θ

适于质谱仪的激光光斑位置定位方法.pdf
本发明公开了一种适于质谱仪的激光光斑位置定位方法,1,将样品板移动至质谱仪离子透镜下方,使其位于质谱仪摄像头的视野内;2,操作目标点位标识装置,标识出离子通过孔中心所在样品板上的垂直投影点,即标记点;3,通过质谱仪激光调节器调整光纤位置,当调整到激光光斑的中心与标记点重合,即完成激光光斑位置定位,从而实现被激光束激发的带电粒子最大限度的穿过所述电极板的离子通过孔进入飞行管到达检测器。本发明专为质谱仪的激光光斑位置调节而设计,大大提高了质谱仪激光光斑位置调节的效率和精度。同时,目标点位标识装置结构简单,操作
光斑轮廓的检测方法.pdf
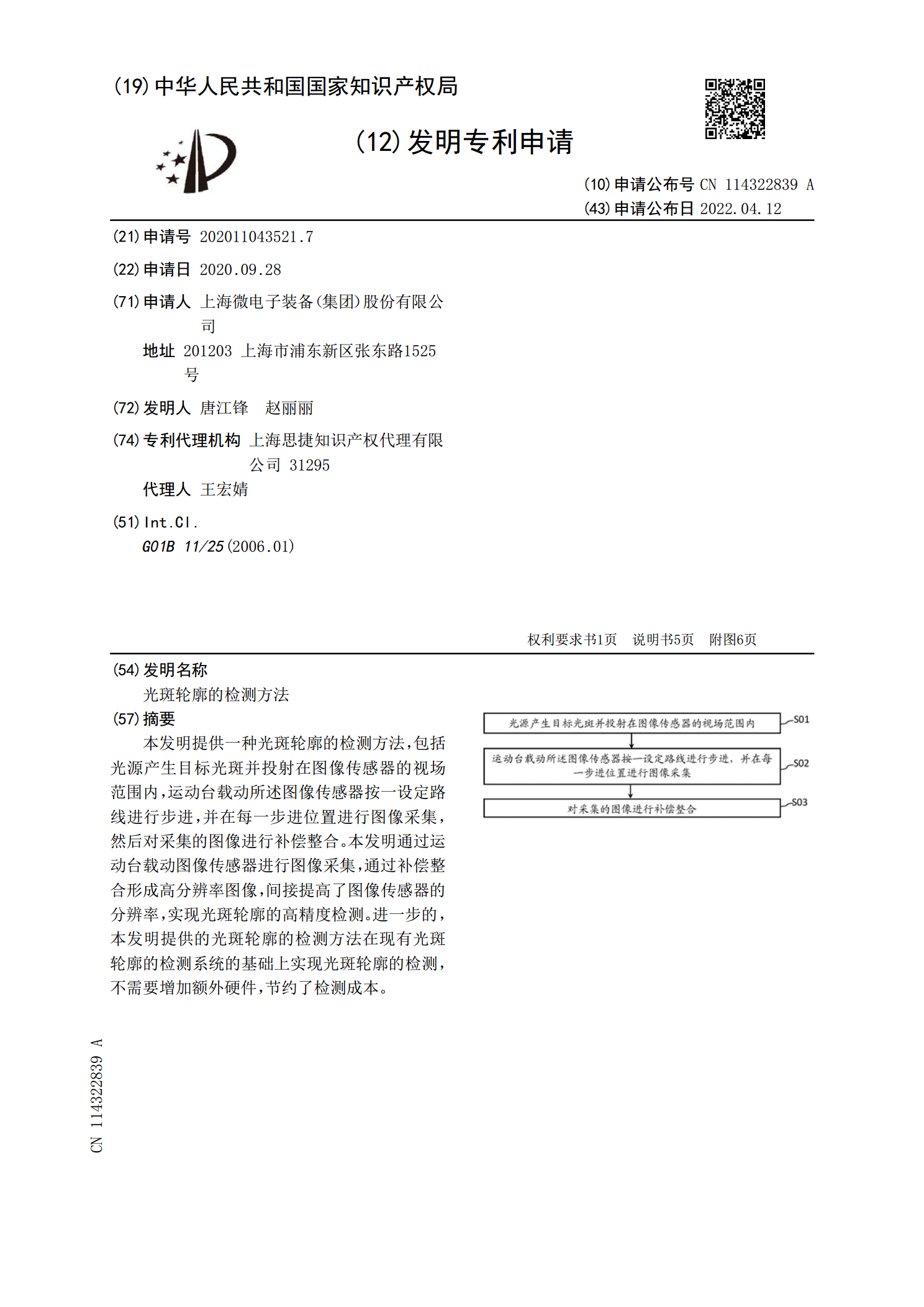
本发明提供一种光斑轮廓的检测方法,包括光源产生目标光斑并投射在图像传感器的视场范围内,运动台载动所述图像传感器按一设定路线进行步进,并在每一步进位置进行图像采集,然后对采集的图像进行补偿整合。本发明通过运动台载动图像传感器进行图像采集,通过补偿整合形成高分辨率图像,间接提高了图像传感器的分辨率,实现光斑轮廓的高精度检测。进一步的,本发明提供的光斑轮廓的检测方法在现有光斑轮廓的检测系统的基础上实现光斑轮廓的检测,不需要增加额外硬件,节约了检测成本。