
搬运机器人.pdf

小沛****文章

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
仓储物流用搬运机器人的托架及搬运机器人.pdf
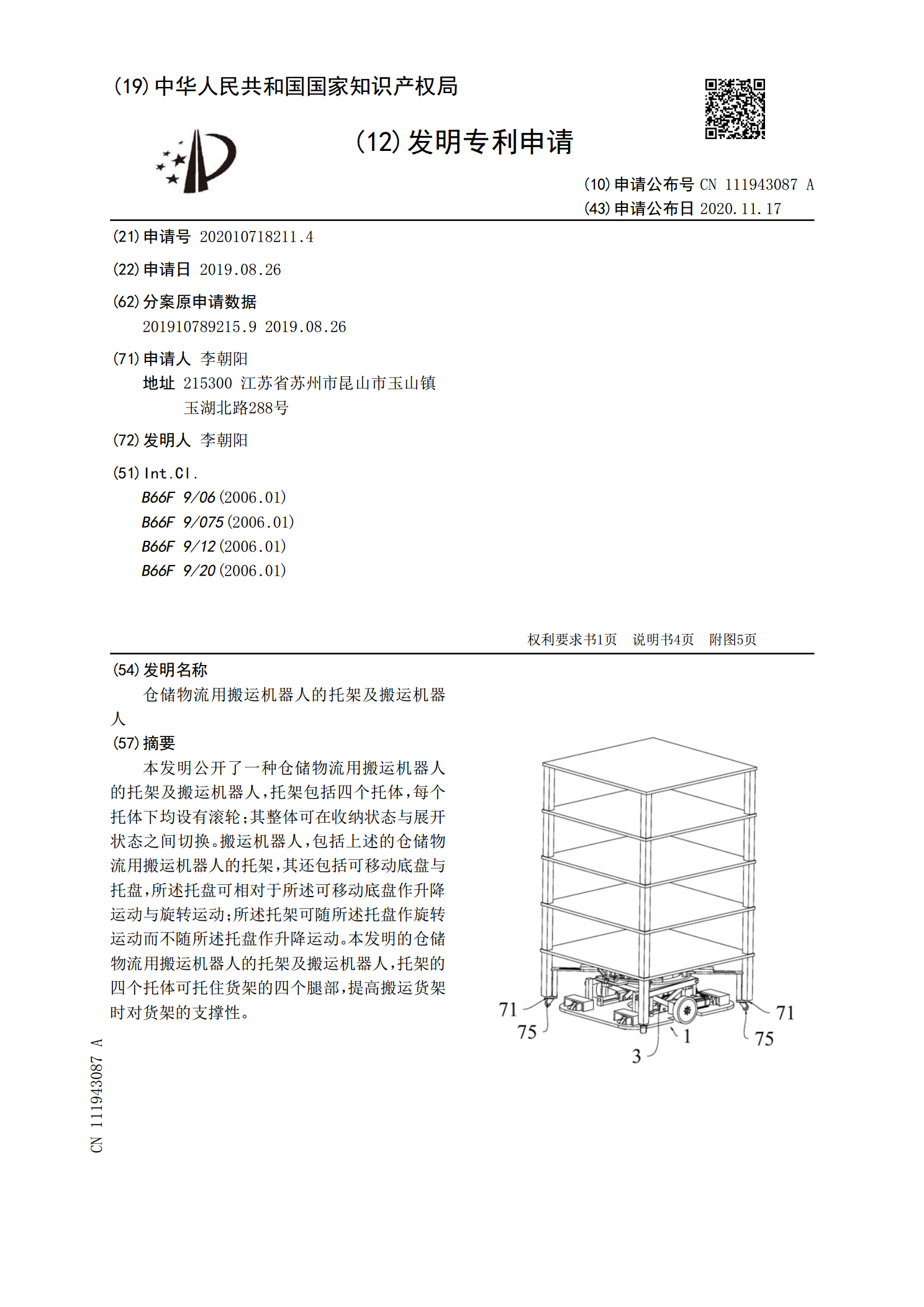
本发明公开了一种仓储物流用搬运机器人的托架及搬运机器人,托架包括四个托体,每个托体下均设有滚轮;其整体可在收纳状态与展开状态之间切换。搬运机器人,包括上述的仓储物流用搬运机器人的托架,其还包括可移动底盘与托盘,所述托盘可相对于所述可移动底盘作升降运动与旋转运动;所述托架可随所述托盘作旋转运动而不随所述托盘作升降运动。本发明的仓储物流用搬运机器人的托架及搬运机器人,托架的四个托体可托住货架的四个腿部,提高搬运货架时对货架的支撑性。
搬运机器人.pdf
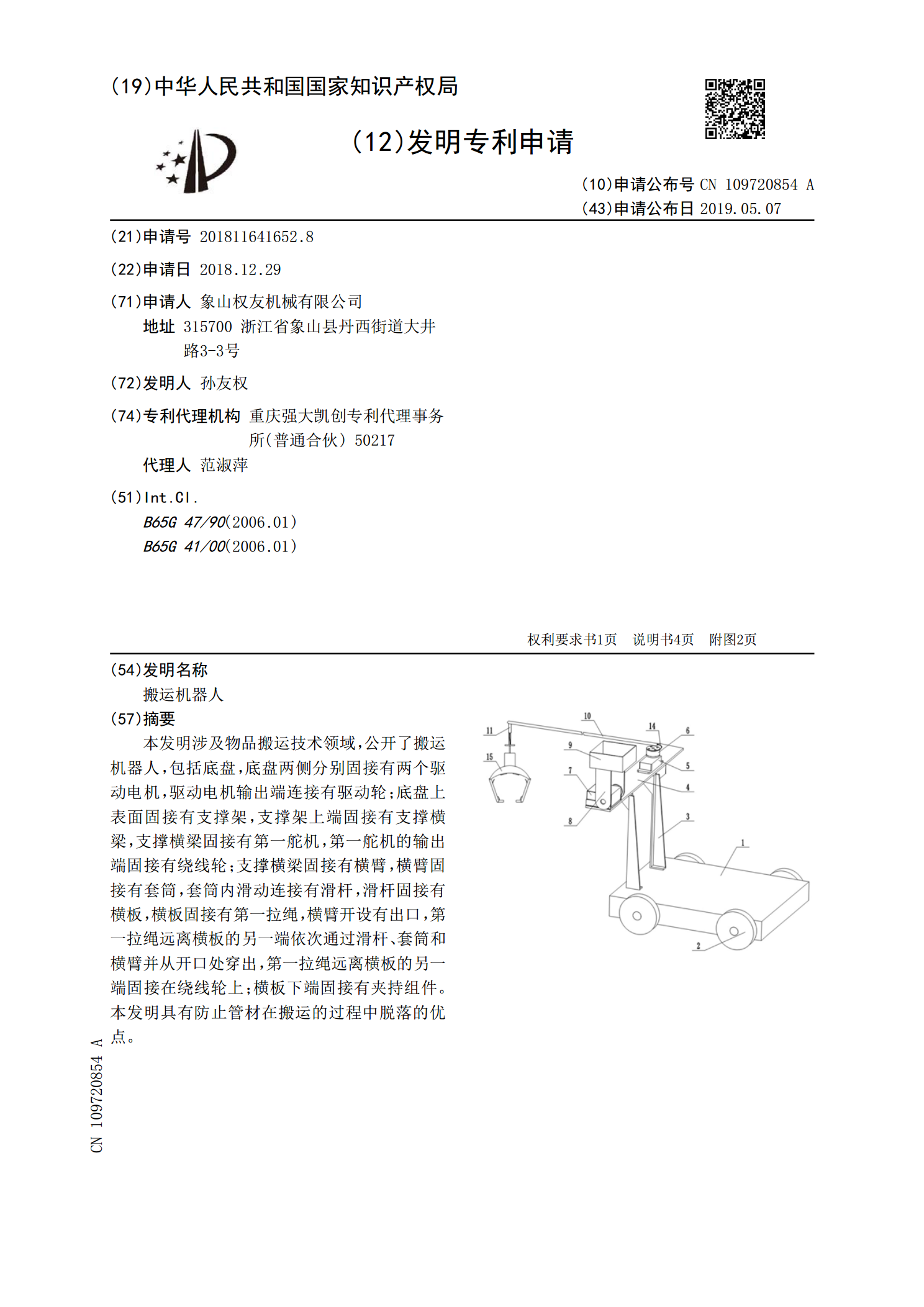
本发明涉及物品搬运技术领域,公开了搬运机器人,包括底盘,底盘两侧分别固接有两个驱动电机,驱动电机输出端连接有驱动轮;底盘上表面固接有支撑架,支撑架上端固接有支撑横梁,支撑横梁固接有第一舵机,第一舵机的输出端固接有绕线轮;支撑横梁固接有横臂,横臂固接有套筒,套筒内滑动连接有滑杆,滑杆固接有横板,横板固接有第一拉绳,横臂开设有出口,第一拉绳远离横板的另一端依次通过滑杆、套筒和横臂并从开口处穿出,第一拉绳远离横板的另一端固接在绕线轮上;横板下端固接有夹持组件。本发明具有防止管材在搬运的过程中脱落的优点。
搬运机器人.pdf
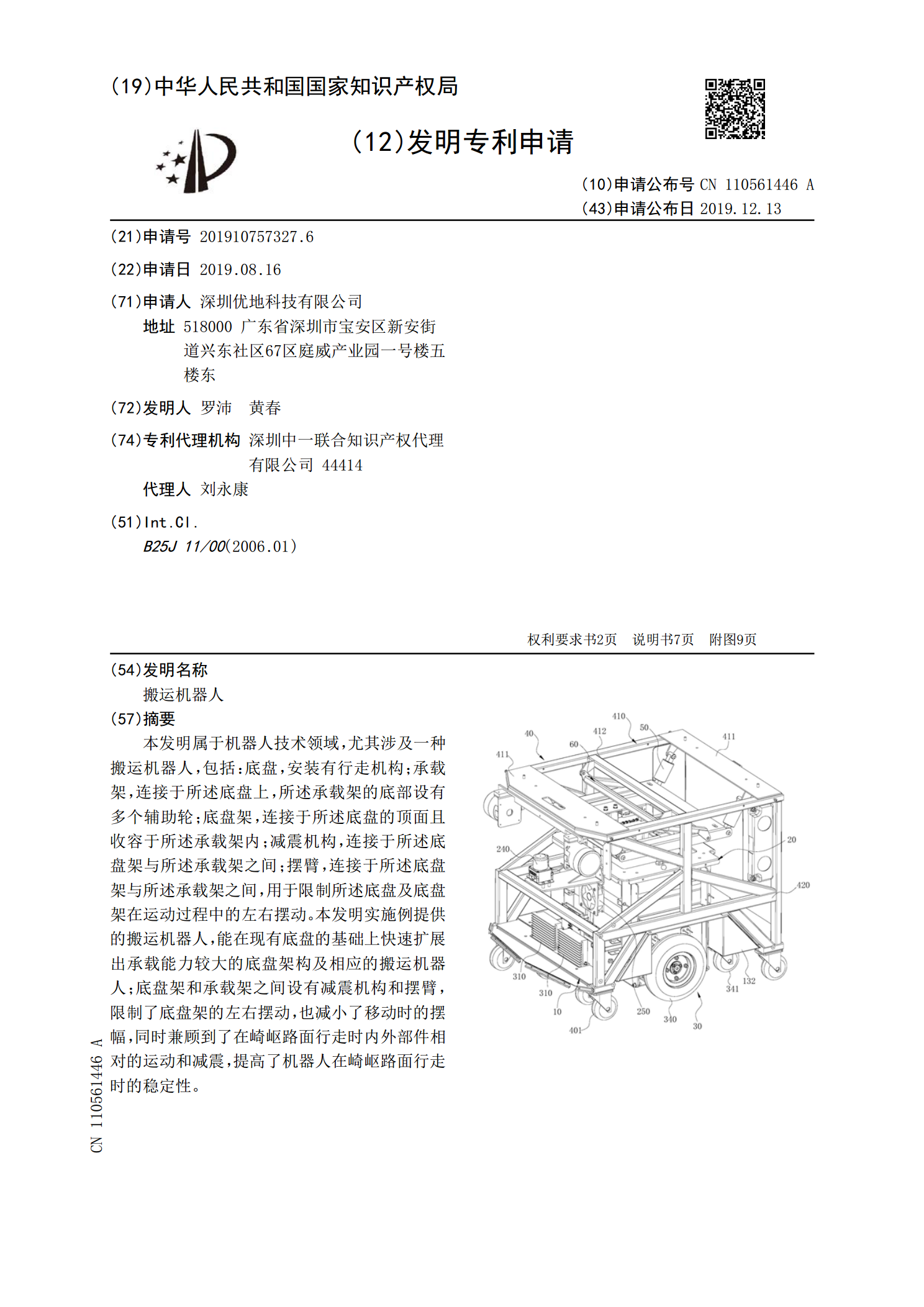
本发明属于机器人技术领域,尤其涉及一种搬运机器人,包括:底盘,安装有行走机构;承载架,连接于所述底盘上,所述承载架的底部设有多个辅助轮;底盘架,连接于所述底盘的顶面且收容于所述承载架内;减震机构,连接于所述底盘架与所述承载架之间;摆臂,连接于所述底盘架与所述承载架之间,用于限制所述底盘及底盘架在运动过程中的左右摆动。本发明实施例提供的搬运机器人,能在现有底盘的基础上快速扩展出承载能力较大的底盘架构及相应的搬运机器人;底盘架和承载架之间设有减震机构和摆臂,限制了底盘架的左右摆动,也减小了移动时的摆幅,同时兼
搬运机器人.pdf
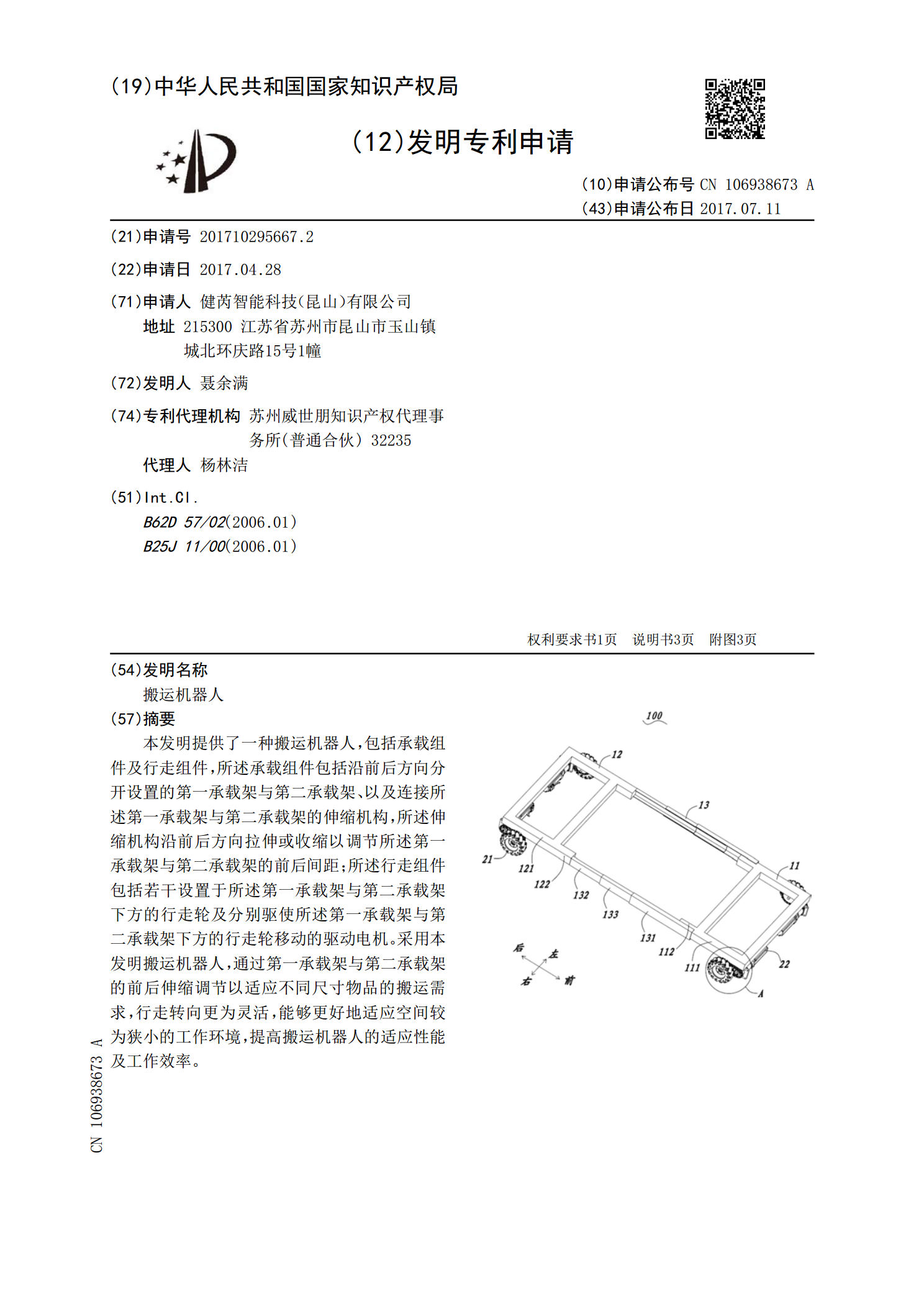
本发明提供了一种搬运机器人,包括承载组件及行走组件,所述承载组件包括沿前后方向分开设置的第一承载架与第二承载架、以及连接所述第一承载架与第二承载架的伸缩机构,所述伸缩机构沿前后方向拉伸或收缩以调节所述第一承载架与第二承载架的前后间距;所述行走组件包括若干设置于所述第一承载架与第二承载架下方的行走轮及分别驱使所述第一承载架与第二承载架下方的行走轮移动的驱动电机。采用本发明搬运机器人,通过第一承载架与第二承载架的前后伸缩调节以适应不同尺寸物品的搬运需求,行走转向更为灵活,能够更好地适应空间较为狭小的工作环境,
搬运机器人.pdf
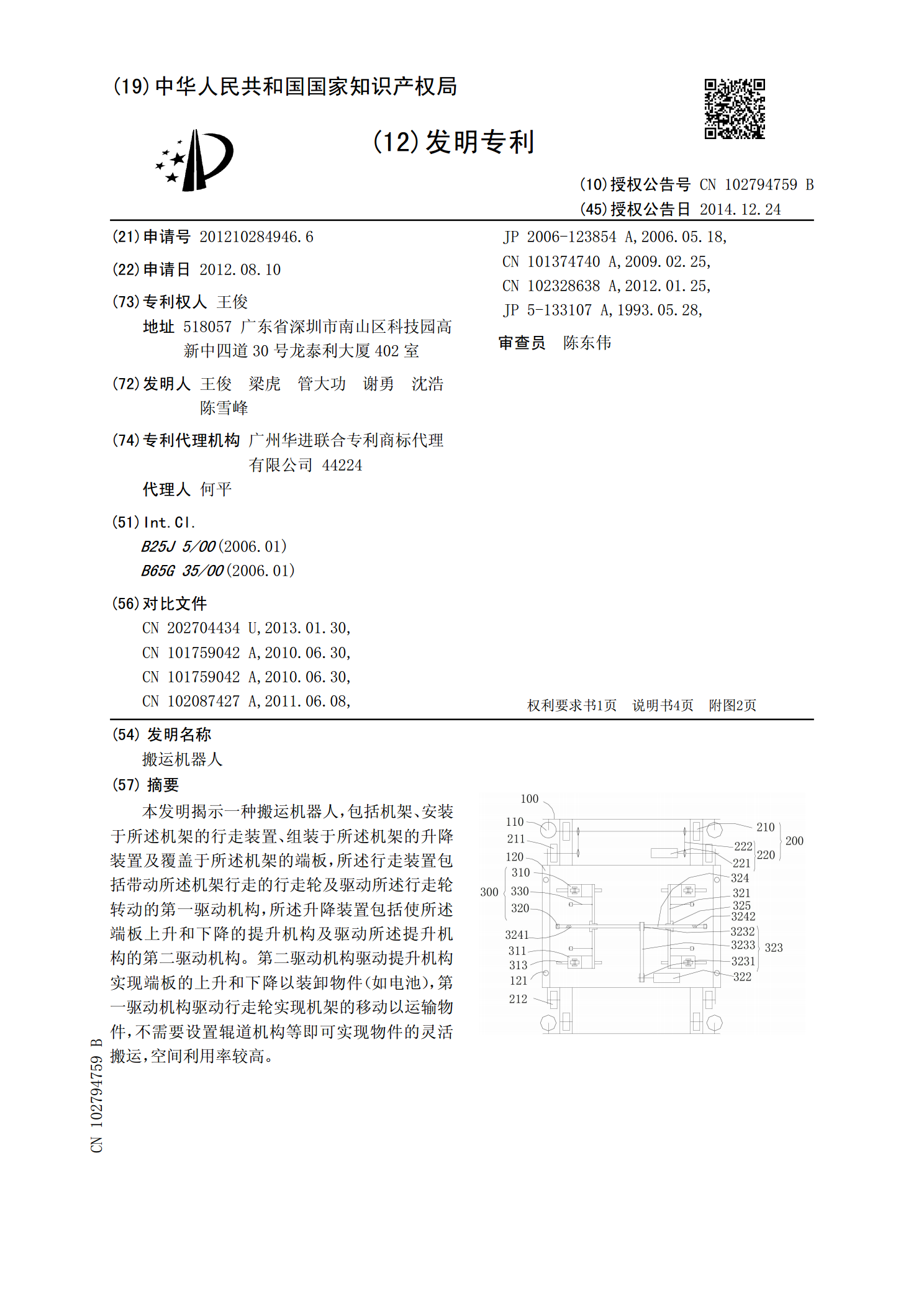
本发明揭示一种搬运机器人,包括机架、安装于所述机架的行走装置、组装于所述机架的升降装置及覆盖于所述机架的端板,所述行走装置包括带动所述机架行走的行走轮及驱动所述行走轮转动的第一驱动机构,所述升降装置包括使所述端板上升和下降的提升机构及驱动所述提升机构的第二驱动机构。第二驱动机构驱动提升机构实现端板的上升和下降以装卸物件(如电池),第一驱动机构驱动行走轮实现机架的移动以运输物件,不需要设置辊道机构等即可实现物件的灵活搬运,空间利用率较高。