
基于手绘草图集成描述子的三维模型检索方法.pdf

邻家****曼玉

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于手绘草图集成描述子的三维模型检索方法.pdf
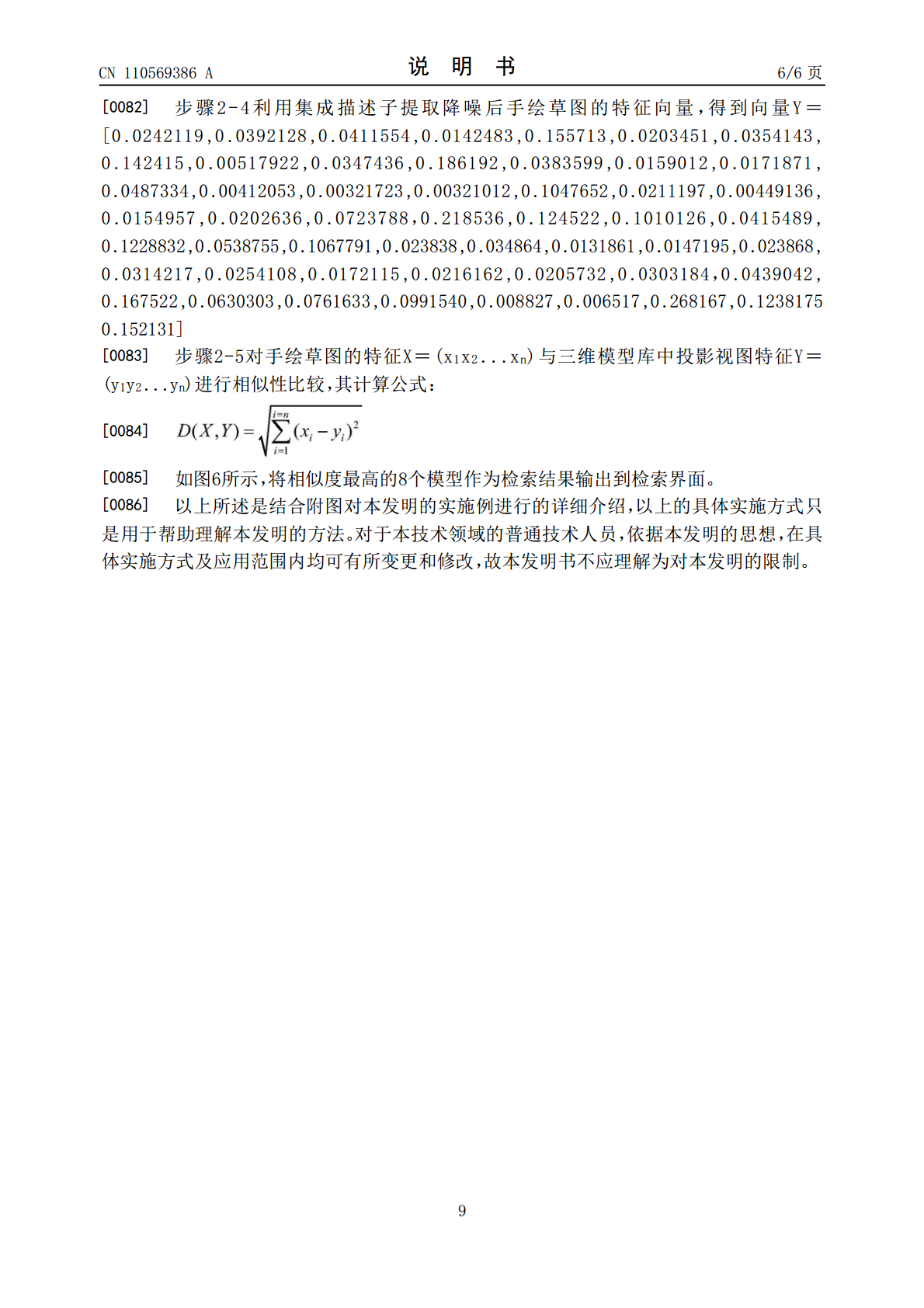
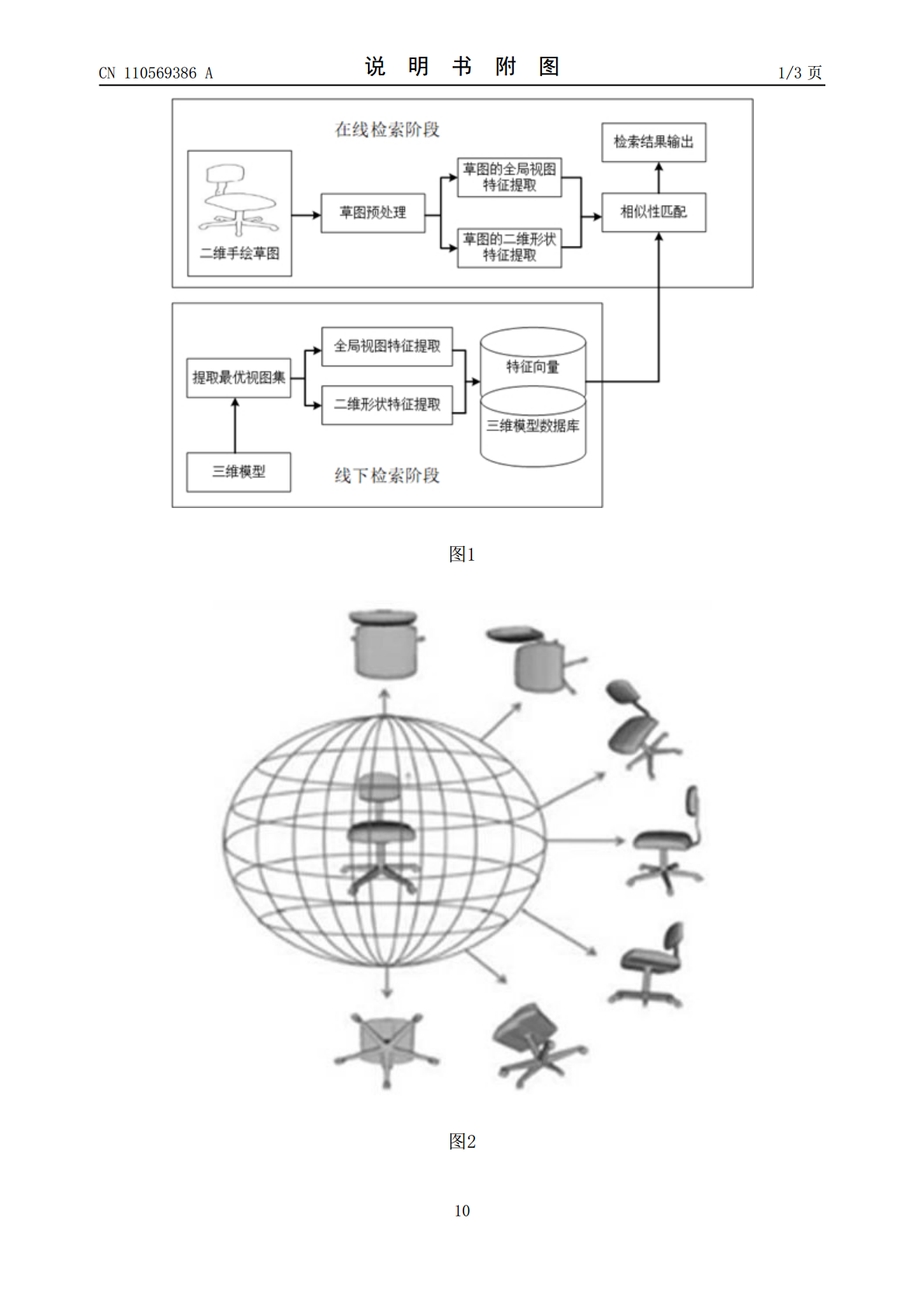
本发明提出了一种基于手绘草图集成描述子的三维模型检索方法,该方法首先对三维模型按照固定投影的方法获取62幅视图集。在视图集中选取轮廓特征最长的24幅二维视图作为三维模型的最优特征视图集。然后,构建融合全局视图特征和二维形状分布的集成描述子。接着对手绘草图进行降噪处理,利用集成描述子提取手绘草图和二维视图的特征。最后利用欧式距离计算草图与二维视图的相似性,检索出与草图近似的二维视图对应的三维模型。此方法首先利用多视图固定投影的方法来解决三维模型降维时特征丢失的问题;其次采用手绘草图降噪方法提高草图精度;最后
基于草图的三维模型检索方法.pdf
本发明一种基于草图的三维模型检索方法,将三维模型处理成多张视角截图的形式,再使用不同的轮廓提取算子将其处理成不同样式的草图,得到草图数据集,将数据集设置好标签后用于训练和测试过程;在卷积神经网络的基础上加入了层次网络方法,1个大分类网络用于训练大的分类,将输入的草图分类到40个大类中,40个小分类网络分别训练每一类模型中的具体差异,将输入的草图分类到某个大类中一个具体的三维模型上,可以较高准确度地检索出三维模型,信息冗余小,本发明使用采样轮廓点计算出的角度矩阵作为卷积神经网络的输入,更加符合草图的特性,检
基于深度学习的手绘草图图像检索方法.pdf
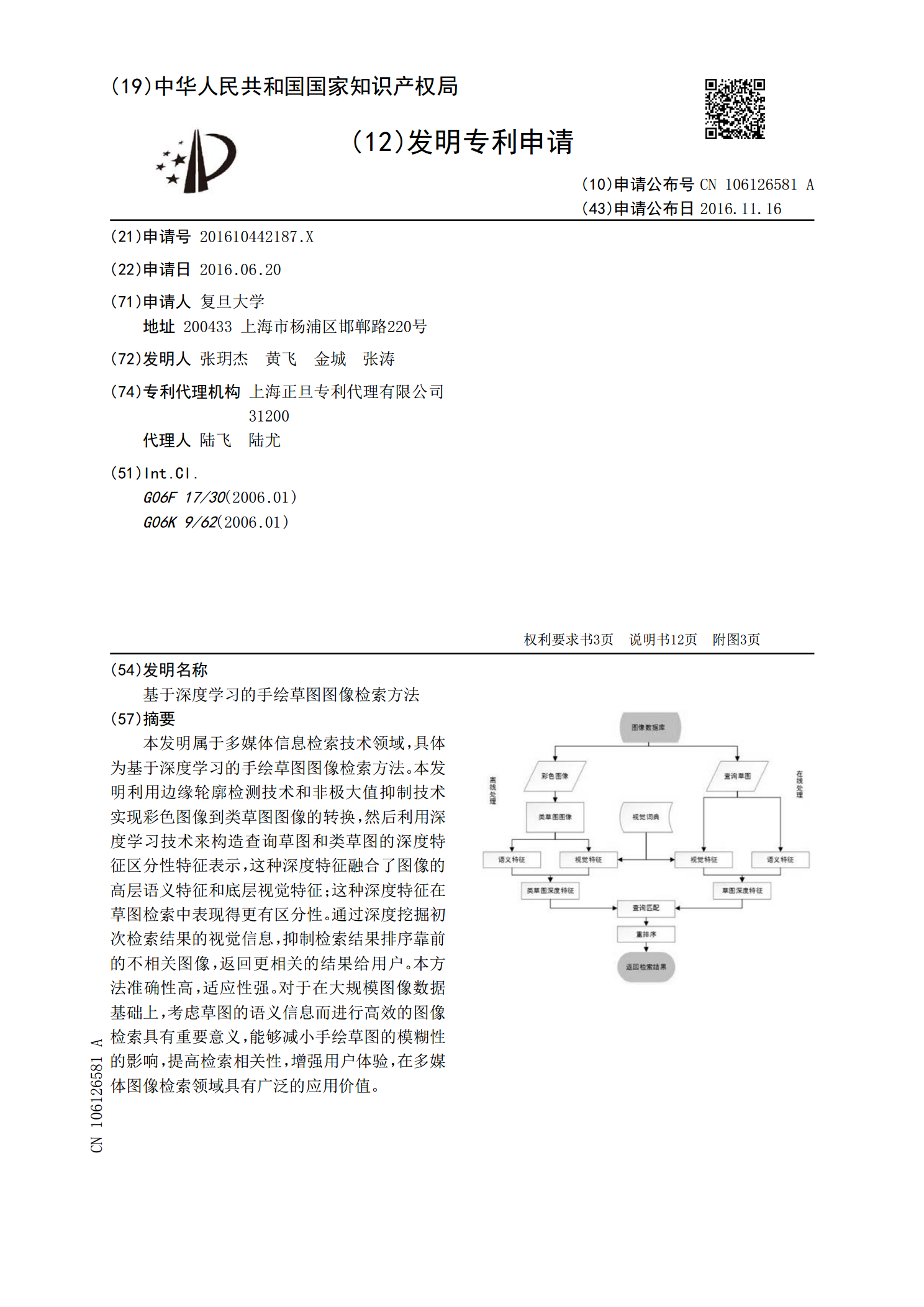
本发明属于多媒体信息检索技术领域,具体为基于深度学习的手绘草图图像检索方法。本发明利用边缘轮廓检测技术和非极大值抑制技术实现彩色图像到类草图图像的转换,然后利用深度学习技术来构造查询草图和类草图的深度特征区分性特征表示,这种深度特征融合了图像的高层语义特征和底层视觉特征;这种深度特征在草图检索中表现得更有区分性。通过深度挖掘初次检索结果的视觉信息,抑制检索结果排序靠前的不相关图像,返回更相关的结果给用户。本方法准确性高,适应性强。对于在大规模图像数据基础上,考虑草图的语义信息而进行高效的图像检索具有重要意

基于服装手绘草图的服装图像检索方法.pdf
本发明公开了基于服装手绘草图的服装图像检索方法,该方法的步骤包括:获取服装手绘草图图像,利用自适应中值滤波器对该图像进行空域平滑预处理S1、对现有的服装样本图像进行图像分割,并利用自适应尺度边缘提取方法对图像轮廓进行提取S2、基于SURF算法,提取服装手绘图像和服装样本图像的特征点S3和建立现有服装样本图像数据库,利用服装手绘草图图像的特征点在数据库中检索,确定符合要求的服装样本图像S4。本方案将手绘草图的图像检索与服装样本良好的相结合,克服现有技术中只能采用刚性结构特征进行图像检索的问题;突破传统手绘草

基于草图的三维模型检索的任务书.docx
基于草图的三维模型检索的任务书任务书1.任务概述本次任务的目标是设计一种基于草图的三维模型检索系统。该系统的主要功能是允许用户通过手绘草图来检索现有的三维模型库,并返回最相关的三维模型作为匹配结果。2.任务内容本任务要求实现以下内容:2.1.设计一个算法来将用户手绘的草图转换为计算机可识别的模型描述。2.2.设计一个基于用户草图的三维模型检索算法。2.3.实现一个可视化界面来展示草图检索结果,并允许用户对结果进行交互操作。2.4.基于现有的三维模型库进行实验,并评估检索算法的检索性能。3.任务细节3.1.