
一种线材均匀缠绕装置及绕线方法.pdf

志玉****爱啊

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种线材均匀缠绕装置及绕线方法.pdf
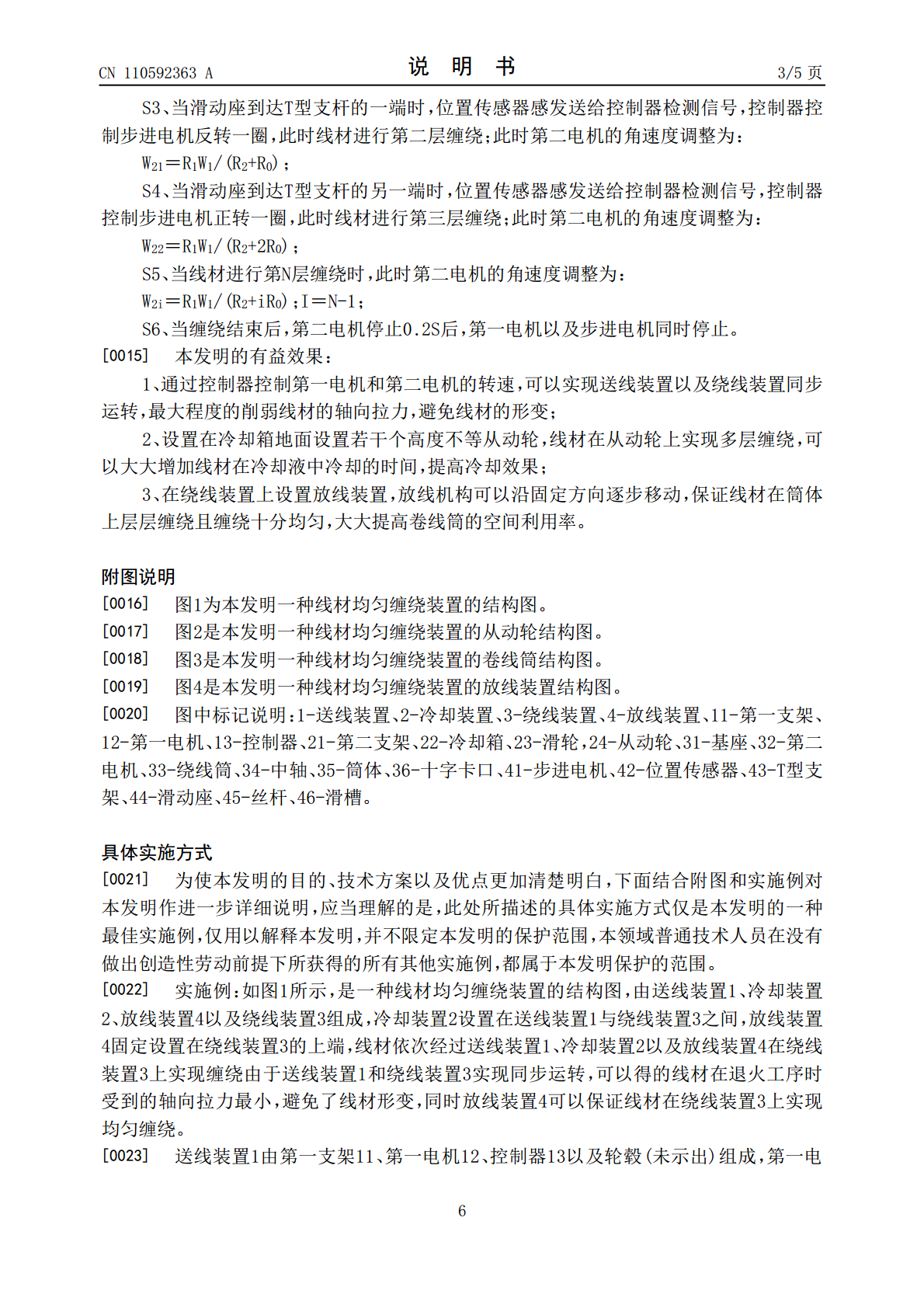
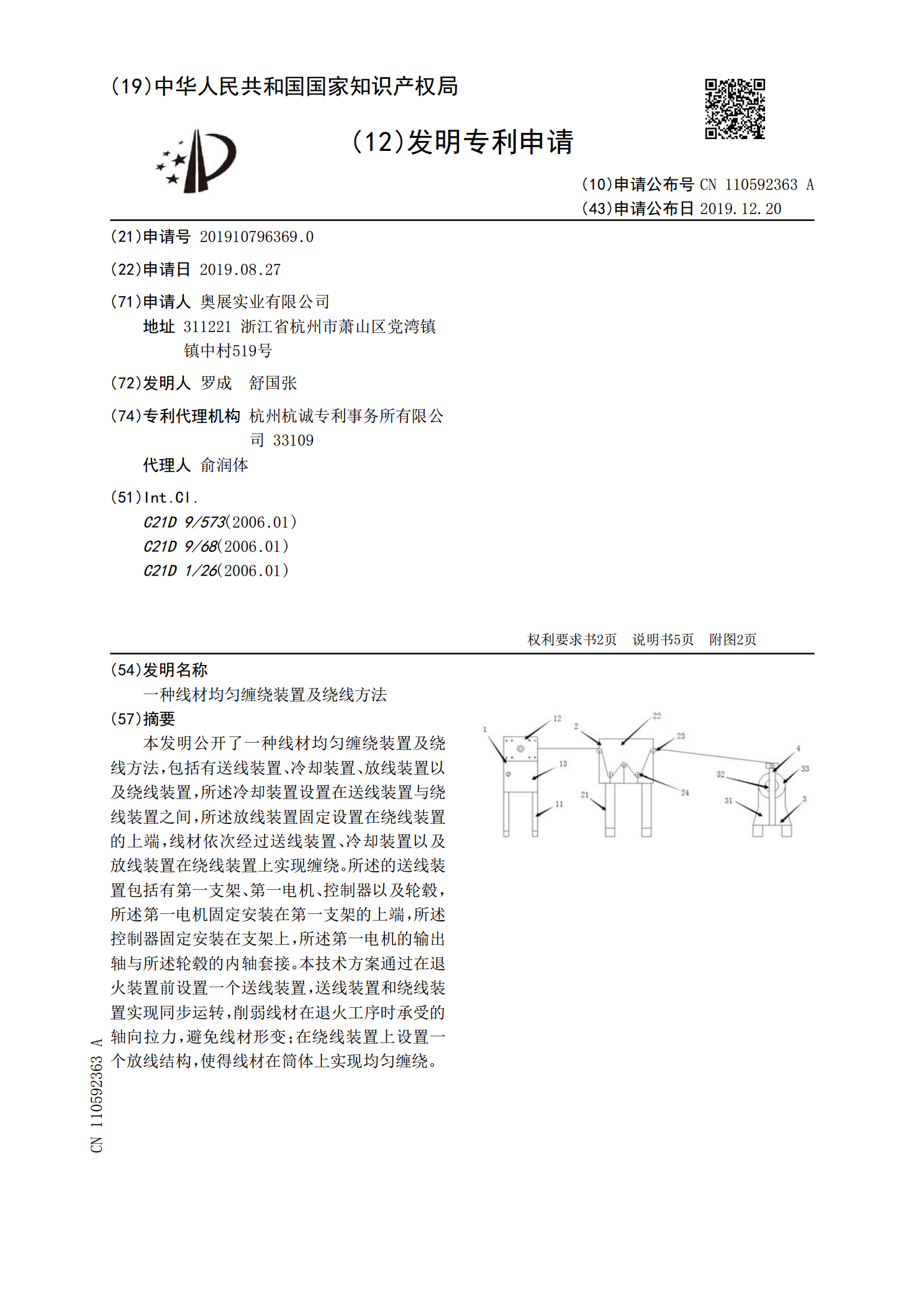
本发明公开了一种线材均匀缠绕装置及绕线方法,包括有送线装置、冷却装置、放线装置以及绕线装置,所述冷却装置设置在送线装置与绕线装置之间,所述放线装置固定设置在绕线装置的上端,线材依次经过送线装置、冷却装置以及放线装置在绕线装置上实现缠绕。所述的送线装置包括有第一支架、第一电机、控制器以及轮毂,所述第一电机固定安装在第一支架的上端,所述控制器固定安装在支架上,所述第一电机的输出轴与所述轮毂的内轴套接。本技术方案通过在退火装置前设置一个送线装置,送线装置和绕线装置实现同步运转,削弱线材在退火工序时承受的轴向拉力
一种缠绕均匀的纺织纤维缠绕装置.pdf
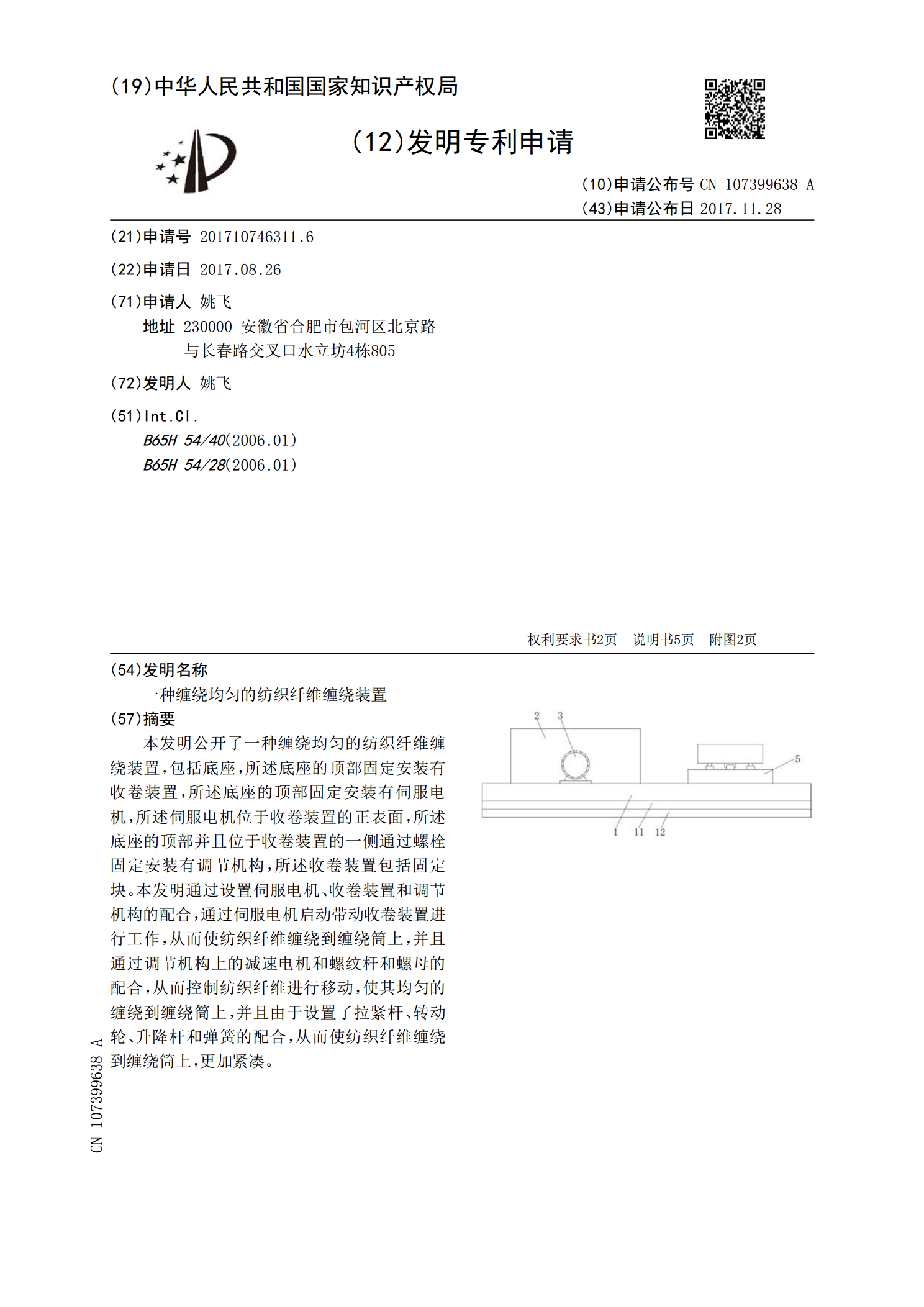
本发明公开了一种缠绕均匀的纺织纤维缠绕装置,包括底座,所述底座的顶部固定安装有收卷装置,所述底座的顶部固定安装有伺服电机,所述伺服电机位于收卷装置的正表面,所述底座的顶部并且位于收卷装置的一侧通过螺栓固定安装有调节机构,所述收卷装置包括固定块。本发明通过设置伺服电机、收卷装置和调节机构的配合,通过伺服电机启动带动收卷装置进行工作,从而使纺织纤维缠绕到缠绕筒上,并且通过调节机构上的减速电机和螺纹杆和螺母的配合,从而控制纺织纤维进行移动,使其均匀的缠绕到缠绕筒上,并且由于设置了拉紧杆、转动轮、升降杆和弹簧的配

一种线材缠绕包装装置.pdf
本发明公开了一种线材缠绕包装装置,包括卷绕机构和缠绕机构,缠绕机构包括缠绕电机、齿轮传动装置、缠绕装置、角度调节装置、包装材料承载装置和固定装置,缠绕装置通过距离调节槽调节包装材料与线材的缠绕角度以及包装材料距离线材轴心的距离,角度调节装置可以调节包装材料与线材的夹角。本发明能在卷绕的同时对线材进行缠绕包装,生产效率高,产品质量稳定。
一种防缠绕线缆回收装置.pdf
本发明提供一种防缠绕线缆回收装置,涉及回收装置技术领域,包括基座,所述基座的一侧固装有一号电机,所述一号电机的输出端安装有绕杆,所述绕杆的两端均固装有限位盘,所述基座的表面固装有滑座,所述滑座的顶面滑动连接有二号电机,所述二号电机的输出端安装有齿轮,所述齿轮的一侧转动连接有滑动架,所述基座的表面位于齿轮的下方固装有齿条,所述基座的表面靠近滑动架的位置处固装有固定架,通过设置基座、一号电机、绕杆、限位盘、滑座、二号电机、齿轮、滑动架、齿条、固定架和一号限位块,利用移动滑动架的方式,使需要缠绕的线缆能够均匀分
一种汽车线材缠绕规整装置.pdf
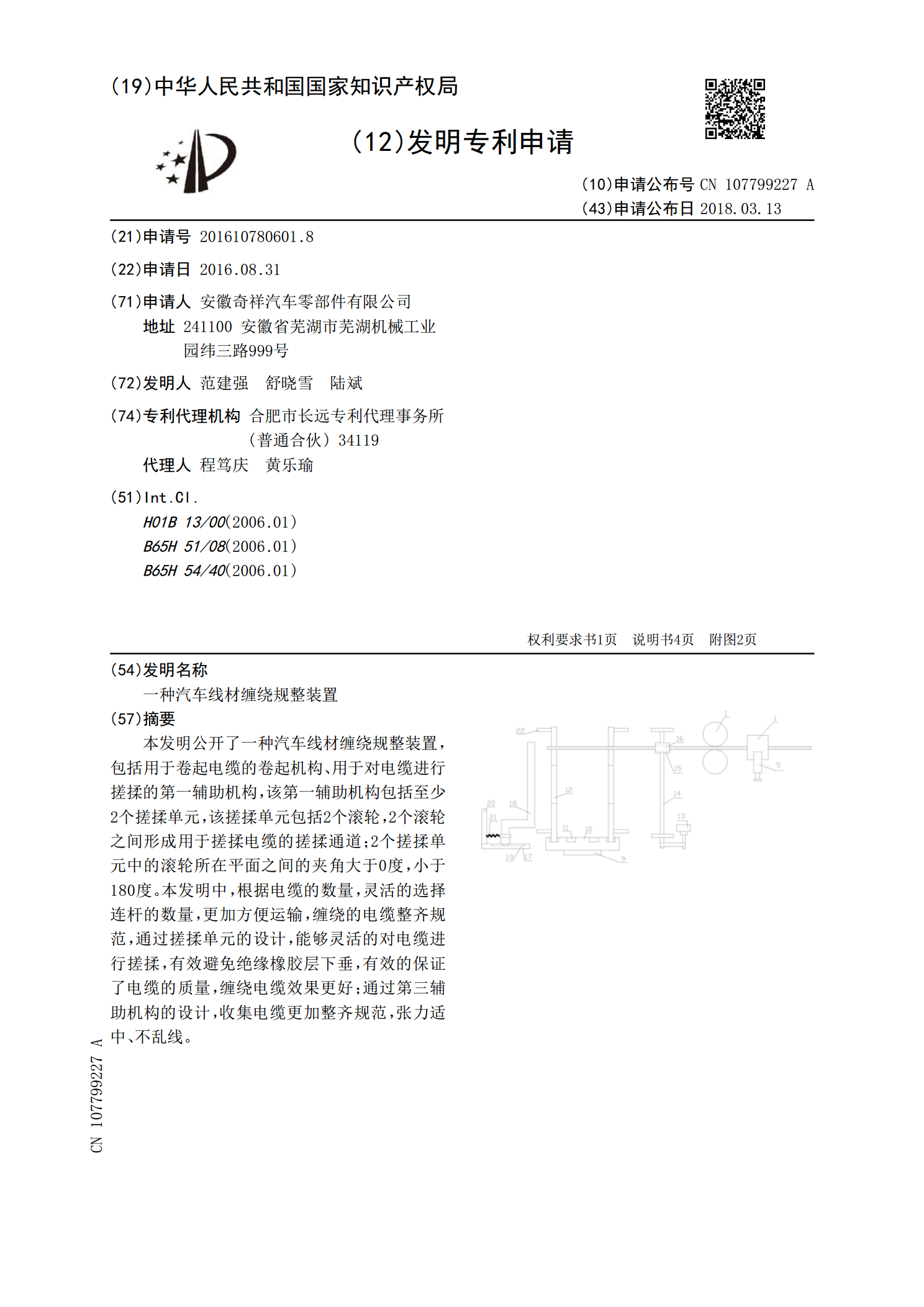
本发明公开了一种汽车线材缠绕规整装置,包括用于卷起电缆的卷起机构、用于对电缆进行搓揉的第一辅助机构,该第一辅助机构包括至少2个搓揉单元,该搓揉单元包括2个滚轮,2个滚轮之间形成用于搓揉电缆的搓揉通道;2个搓揉单元中的滚轮所在平面之间的夹角大于0度,小于180度。本发明中,根据电缆的数量,灵活的选择连杆的数量,更加方便运输,缠绕的电缆整齐规范,通过搓揉单元的设计,能够灵活的对电缆进行搓揉,有效避免绝缘橡胶层下垂,有效的保证了电缆的质量,缠绕电缆效果更好;通过第三辅助机构的设计,收集电缆更加整齐规范,张力适中