
一种具有调节功能的便捷型智能割草机器人.pdf

Ma****57


1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种具有调节功能的便捷型智能割草机器人.pdf
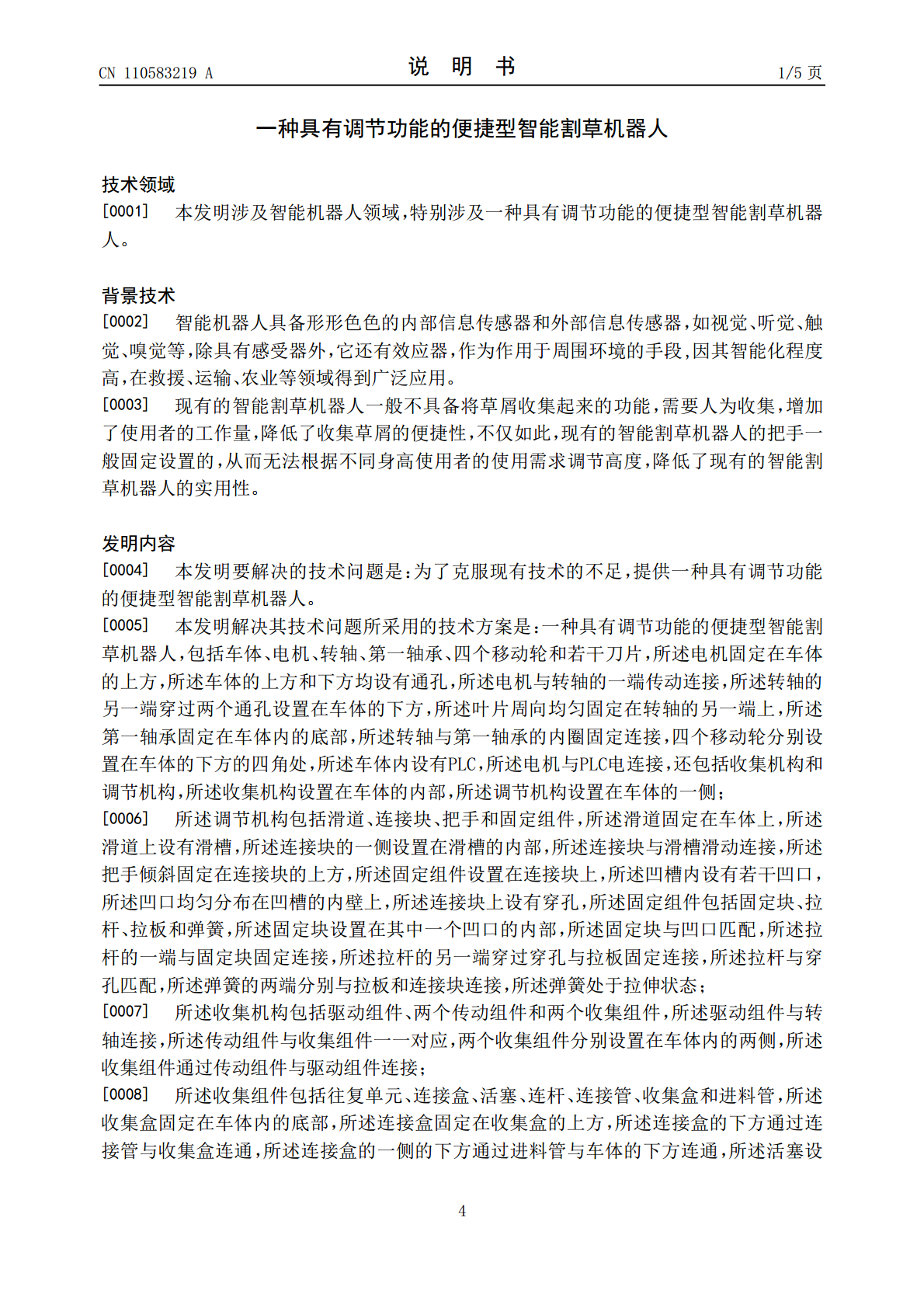
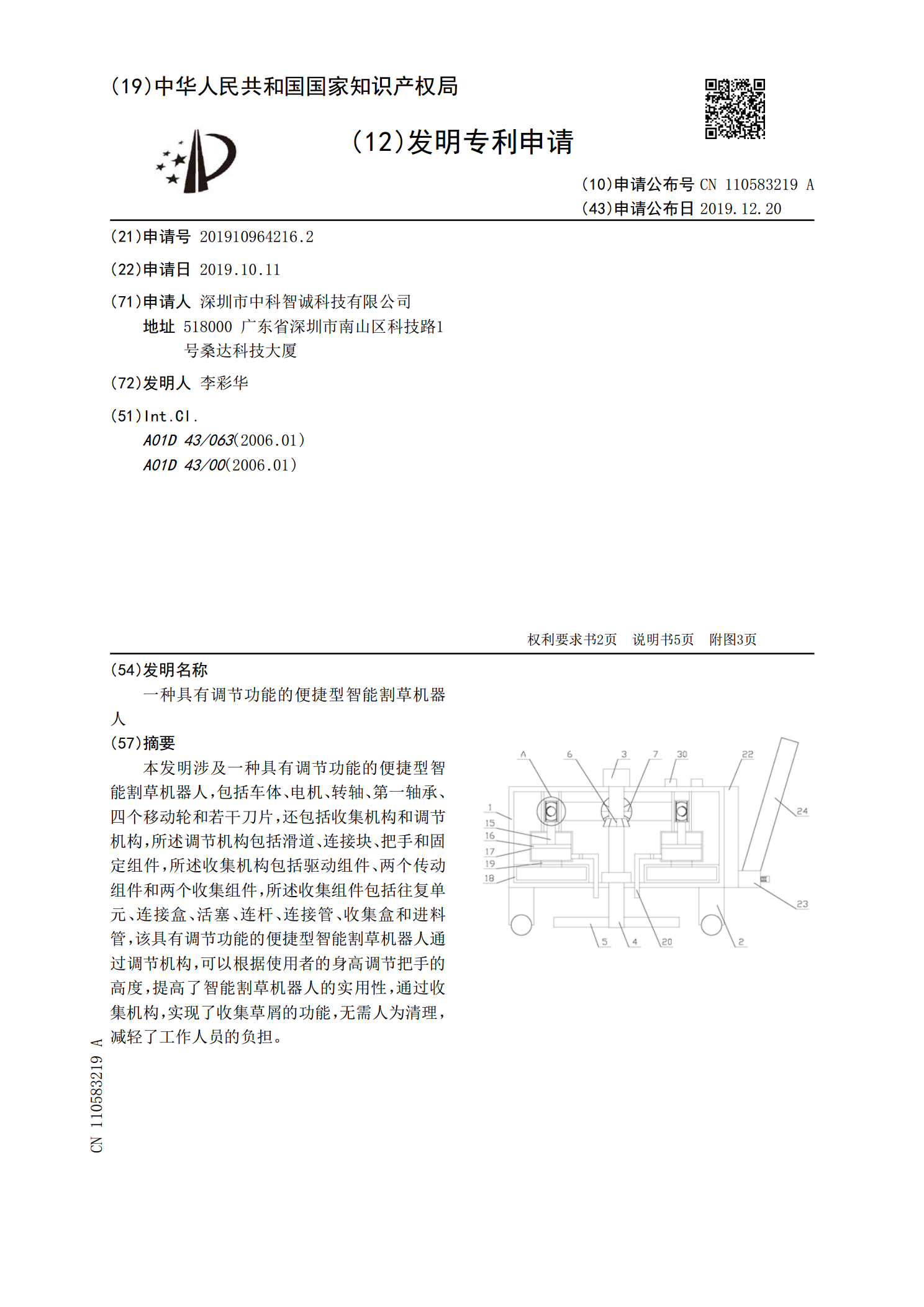
本发明涉及一种具有调节功能的便捷型智能割草机器人,包括车体、电机、转轴、第一轴承、四个移动轮和若干刀片,还包括收集机构和调节机构,所述调节机构包括滑道、连接块、把手和固定组件,所述收集机构包括驱动组件、两个传动组件和两个收集组件,所述收集组件包括往复单元、连接盒、活塞、连杆、连接管、收集盒和进料管,该具有调节功能的便捷型智能割草机器人通过调节机构,可以根据使用者的身高调节把手的高度,提高了智能割草机器人的实用性,通过收集机构,实现了收集草屑的功能,无需人为清理,减轻了工作人员的负担。
一种具有调节功能的便捷型智能床.pdf
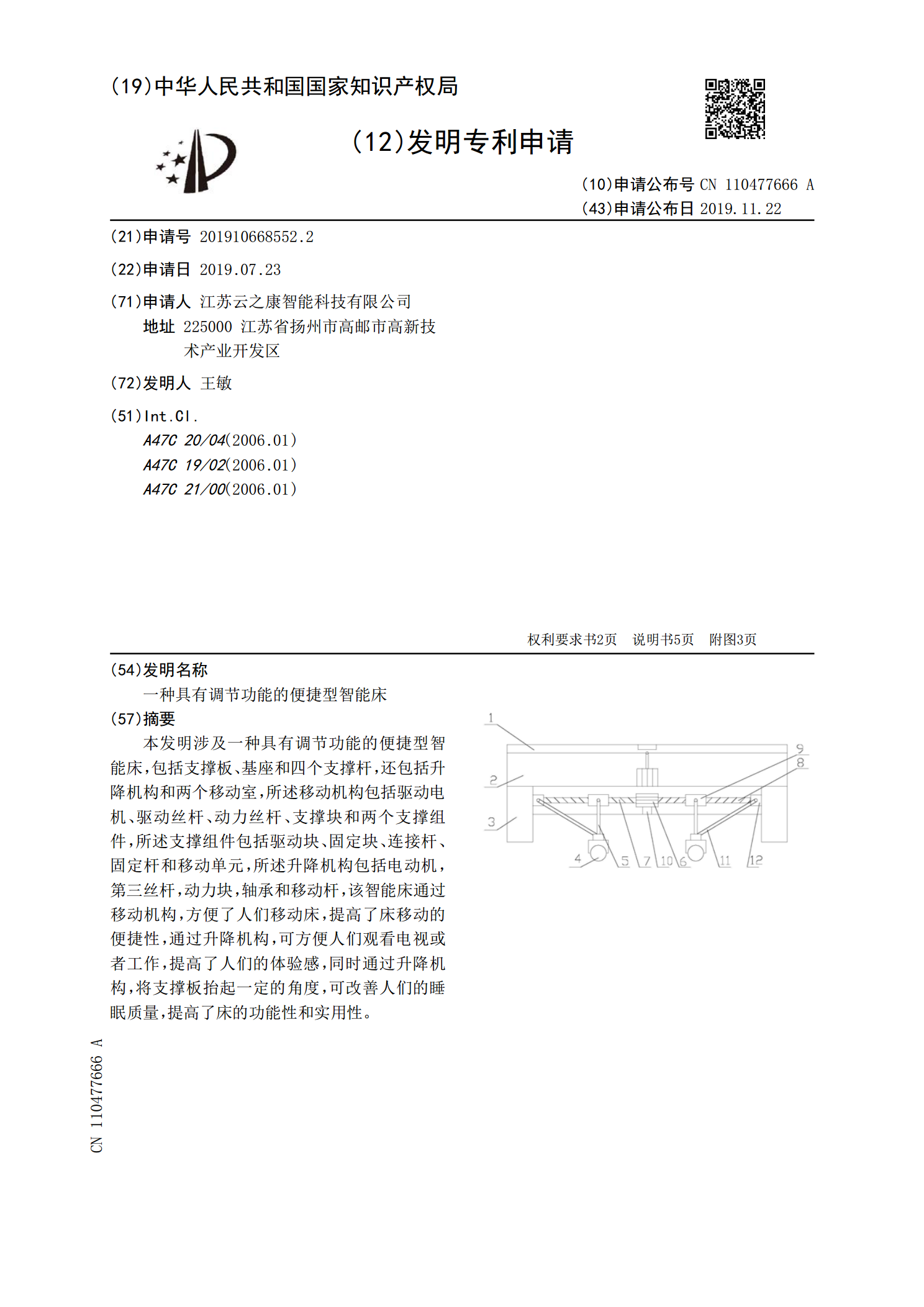
本发明涉及一种具有调节功能的便捷型智能床,包括支撑板、基座和四个支撑杆,还包括升降机构和两个移动室,所述移动机构包括驱动电机、驱动丝杆、动力丝杆、支撑块和两个支撑组件,所述支撑组件包括驱动块、固定块、连接杆、固定杆和移动单元,所述升降机构包括电动机,第三丝杆,动力块,轴承和移动杆,该智能床通过移动机构,方便了人们移动床,提高了床移动的便捷性,通过升降机构,可方便人们观看电视或者工作,提高了人们的体验感,同时通过升降机构,将支撑板抬起一定的角度,可改善人们的睡眠质量,提高了床的功能性和实用性。
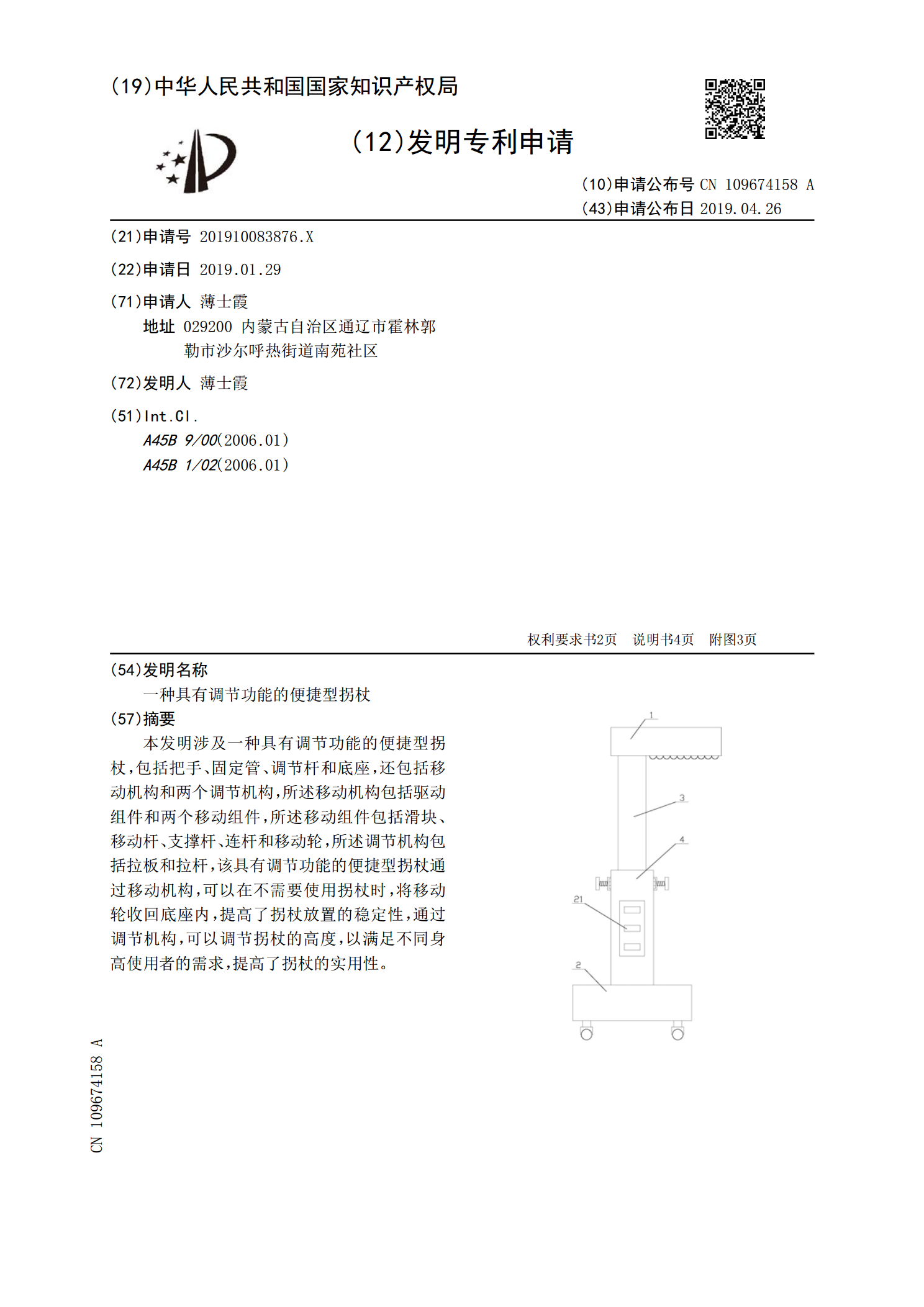
一种具有调节功能的便捷型拐杖.pdf
本发明涉及一种具有调节功能的便捷型拐杖,包括把手、固定管、调节杆和底座,还包括移动机构和两个调节机构,所述移动机构包括驱动组件和两个移动组件,所述移动组件包括滑块、移动杆、支撑杆、连杆和移动轮,所述调节机构包括拉板和拉杆,该具有调节功能的便捷型拐杖通过移动机构,可以在不需要使用拐杖时,将移动轮收回底座内,提高了拐杖放置的稳定性,通过调节机构,可以调节拐杖的高度,以满足不同身高使用者的需求,提高了拐杖的实用性。
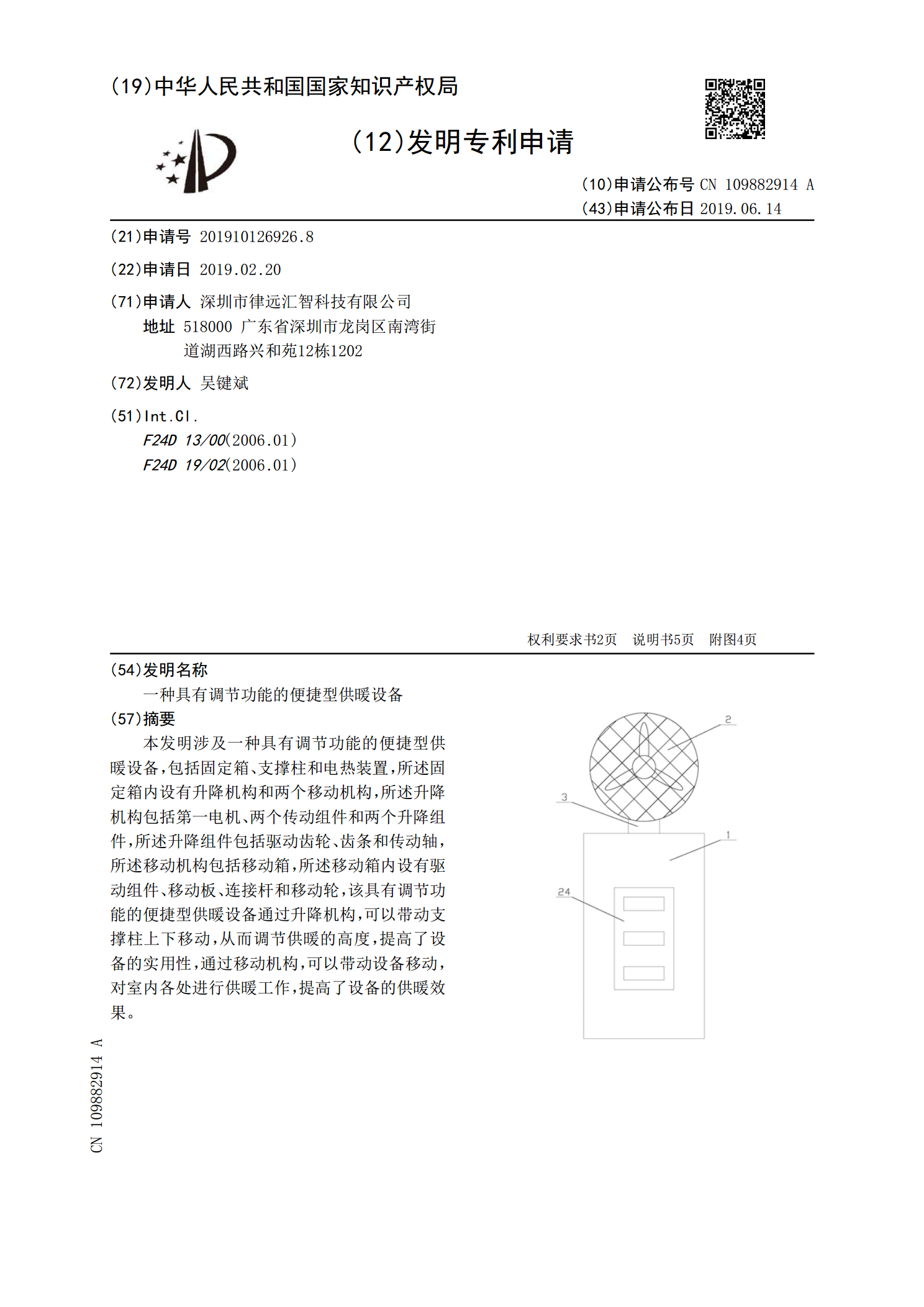
一种具有调节功能的便捷型供暖设备.pdf
本发明涉及一种具有调节功能的便捷型供暖设备,包括固定箱、支撑柱和电热装置,所述固定箱内设有升降机构和两个移动机构,所述升降机构包括第一电机、两个传动组件和两个升降组件,所述升降组件包括驱动齿轮、齿条和传动轴,所述移动机构包括移动箱,所述移动箱内设有驱动组件、移动板、连接杆和移动轮,该具有调节功能的便捷型供暖设备通过升降机构,可以带动支撑柱上下移动,从而调节供暖的高度,提高了设备的实用性,通过移动机构,可以带动设备移动,对室内各处进行供暖工作,提高了设备的供暖效果。

一种具有调节功能的便捷型软件测试设备.pdf
本发明涉及一种具有调节功能的便捷型软件测试设备,包括显示屏、主体、清洁机构和调节机构,所述清洁机构包括固定盒、支撑轴、摆动杆、铰接杆、铰接块、拉杆和第一弹簧,所述调节机构包括调节组件和两个支撑组件,所述支撑组件包括支撑盒、支撑杆、第二弹簧和密封板,该具有调节功能的便捷型软件测试设备通过清洁机构,可以清洁显示屏上的灰尘,避免灰尘覆盖在显示屏上,影响显示屏的显示清晰度,通过调节机构,可以调节主体的高度,从而满足不同身高的使用者的使用需求,提高了观察显示屏的舒适性。