
一种叶轮组合快速定位方法.pdf

是你****芹呀

1/6
2/6
3/6
4/6
5/6
6/6
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种叶轮组合快速定位方法.pdf
本发明涉及一种叶轮组合快速定位方法,包括:S1,用GPS记录风机中心点的坐标;S2,在机位平台确定履带吊的坐标;S3,初步确定轮毂中心点坐标和叶片方位角;S4,模拟验证;S5,现场最终确定轮毂中心点坐标和叶片方位角。本发明通过风电场的平面布置图,找出机位的中心坐标,再根据履带吊性能及机舱、叶轮等设备的重量尺寸等参数,确定叶轮最佳的组合位置及叶片朝向,以减少植被的破坏。

一种离心泵叶轮定位及快速更换轴承机构、叶轮定位方法及轴承更换方法.pdf
本发明属于离心泵辅助拆装技术领域,具体涉及离心泵叶轮定位及快速更换轴承机构、叶轮定位方法及轴承更换方法。本发明提供一种安装维护方便,便于叶轮定位的离心泵叶轮定位及快速更换轴承机构。本发明离心泵叶轮定位及快速更换轴承机构的特征在于:轴承壳体内的泵轴表面固定设置有轴承套,轴承套前端与轴承壳体之间设置有前轴承,轴承套的后端与轴承壳体之间设置有后轴承;所述前轴承设置于轴承套前端的前定位凸缘和卡簧之间,所述轴承套上相应于后轴承前端设置有后定位凸缘,泵轴上通过连接螺纹设置有轴承螺母,轴承螺母与后轴承后端面相对应;轴承
一种叶轮轴定位装置及定位方法.pdf
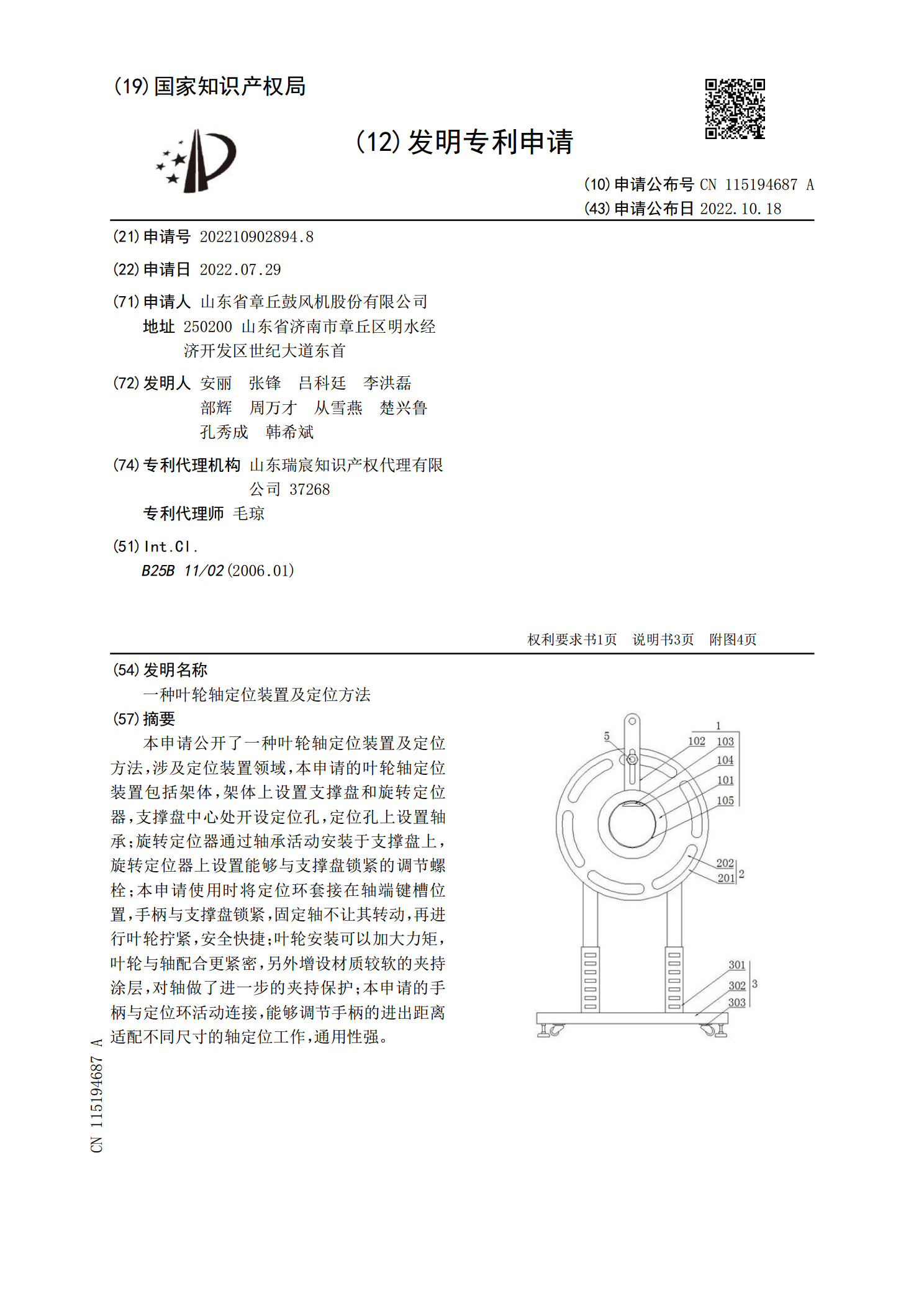
本申请公开了一种叶轮轴定位装置及定位方法,涉及定位装置领域,本申请的叶轮轴定位装置包括架体,架体上设置支撑盘和旋转定位器,支撑盘中心处开设定位孔,定位孔上设置轴承;旋转定位器通过轴承活动安装于支撑盘上,旋转定位器上设置能够与支撑盘锁紧的调节螺栓;本申请使用时将定位环套接在轴端键槽位置,手柄与支撑盘锁紧,固定轴不让其转动,再进行叶轮拧紧,安全快捷;叶轮安装可以加大力矩,叶轮与轴配合更紧密,另外增设材质较软的夹持涂层,对轴做了进一步的夹持保护;本申请的手柄与定位环活动连接,能够调节手柄的进出距离适配不同尺寸的

一种组合式的叶轮制造方法及叶轮.pdf
本发明涉及一种组合式的叶轮制造方法及叶轮,所述方法包括如下步骤:步骤1:进行蜡模铸造,得到基体壳体和片体壳体,基体壳体上设置有若干通孔,片体壳体的形状与通孔相匹配;步骤2:分别对基体壳体和片体壳体的表面涂刷耐火材料层;步骤3:对涂刷耐火材料层后的基体壳体和片体壳体进行脱蜡,以得到基体型壳和片体型壳;步骤4:进行焙烧,得到焙烧后的基体型壳和片体型壳;步骤5:浇注液态不锈钢至基体型壳:和片体型壳内,得到叶轮基体和叶轮片体;步骤6:将叶轮片体焊接在叶轮基体的通孔内,得到叶轮。本发明制成的叶轮质量高,无夹铁,且无

风机叶轮快速定位焊接装置.pdf
一种风机叶轮快速定位焊接装置,包括底板、滑轨、滑块、叶片托架、托架定位螺栓、叶片限位块、叶片,轮毂,轮毂固定柱,滑轨通过螺栓固定在底板上,滑轨中间设置有滑块,滑块的一端设置有放置叶片的叶片托架,叶片托架上还设置有调节与轮毂距离的托架定位螺栓,叶片托架上设置有叶片限位块,底板中心设置有轮毂固定柱,轮毂通过固定在轮毂固定柱上,从而使得该装置能够适应不同的规格的风机叶轮的定位焊接,实现快速定位、焊接,且加工成形后,形位公差满足要求,按此装置焊接加工出来的风机叶轮动平衡配重仅为现有技术焊接加工的风机叶轮配重的七分